TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043194
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150580
出願日
2023-09-15
発明の名称
船舶用自動操舵装置
出願人
東京計器株式会社
代理人
個人
,
弁理士法人i.PARTNERS特許事務所
主分類
B63H
25/04 20060101AFI20250321BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】より小さい舵角により半径一定の旋回を実現する技術を提供する。
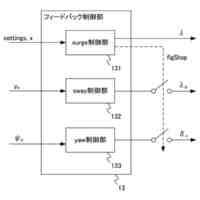
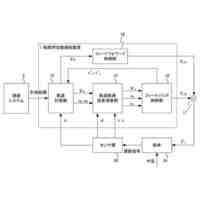
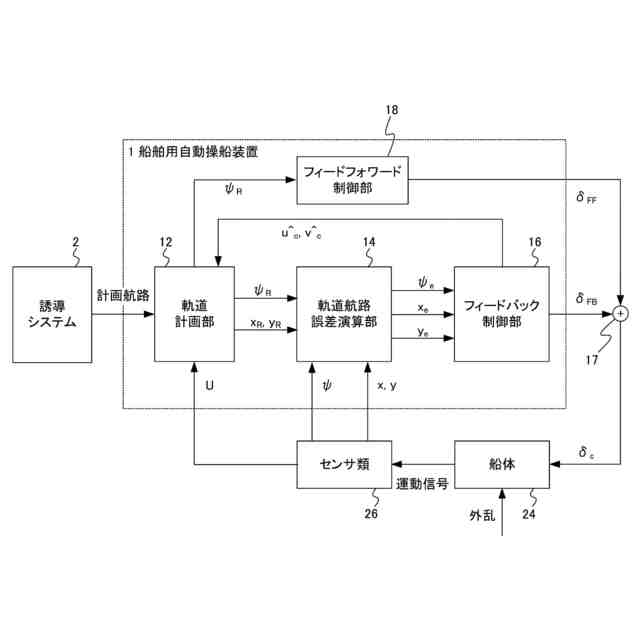
【解決手段】計画航路に基づいて船体の参照方位及び参照位置を出力する軌道計画部と、前記船体の方位及び位置を参照方位及び参照位置に追従させるべくフィードバック舵角を出力するフィードバック制御部と、旋回動作時に前記船体の方位を前記参照方位に追従させるフィードフォワード舵角を出力するフィードフォワード制御部とを備えた船舶用自動操舵装置であって、前記軌道計画部は、旋回開始位置と操舵開始位置との間の距離であるリーチ量の変針量と潮流成分とに基づく算出において、前記潮流成分が予め設定された潮流成分の上限値以上である場合、前記潮流成分を前記潮流成分の上限値に置き換えることを特徴とする。
【選択図】図2
特許請求の範囲
【請求項1】
計画航路に基づいて船体の参照方位及び参照位置を出力する軌道計画部と、前記船体の方位及び位置を参照方位及び参照位置に追従させるべくフィードバック舵角を出力するフィードバック制御部と、旋回動作時に前記船体の方位を前記参照方位に追従させるフィードフォワード舵角を出力するフィードフォワード制御部とを備えた船舶用自動操舵装置であって、
前記軌道計画部は、旋回開始位置と操舵開始位置との間の距離であるリーチ量の変針量と潮流成分とに基づく算出において、前記潮流成分が予め設定された潮流成分の上限値以上である場合、前記潮流成分を前記潮流成分の上限値に置き換えることを特徴とする船舶用自動操舵装置。
続きを表示(約 200 文字)
【請求項2】
前記軌道計画部は、前記リーチ量の算出において、前記変針量が予め設定された変針量の上限値以上である場合、前記変針量を前記変針量の上限値に置き換えることを特徴とする請求項1に記載の船舶用自動操舵装置。
【請求項3】
前記潮流成分の上限値は、0より大きく1より小さい値を前記潮流成分に乗じた値であることを特徴とする請求項1または請求項2に記載の船舶用自動操舵装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶を自動操舵する技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
航路制御システム(TCS:Track Control System)は、保持と旋回の機能を有し、操舵によって計画航路に船位を追従させる。計画航路は、直線航路と円弧航路とからなる。航路制御システムにより制御される船舶が計画航路の直線航路から円弧航路へ移行する際、直線航路から変針動作が開始される。
【0003】
このような動作は、軌道追従方式(Trajectory Tracking Method)による開ループ制御を行う航路旋回システム(Curved-Tracking System)により実現可能である。このような航路旋回システムにおいて、円弧航路は旋回の開始、旋回の終点をそれぞれ示すウェイポイントと、旋回の半径及び角度とから構成される。
【0004】
一般的に、航路旋回システムは、非特許文献1-3に記載されるように、閉ループ制御を行うものが多い。しかしながら、閉ループ制御によって旋回半径を一定とすることは困難である。閉ループ制御の主目的は、閉ループ安定性と外乱除去性とによるレギュレータ問題の解決である。よって、閉ループ制御は、旋回運動のような追従応答性によるサーボ問題の解決には不十分である。
【0005】
レギュレータ問題とサーボ問題との間にはトレードオフ関係が存在するため、フィードバック制御のみによってレギュレータ問題とサーボ問題との両方を解決することは困難である。閉ループ制御を行う航路旋回システムによれば、旋回時の方位変化や潮流成分などの外乱変化への追従が不十分となり、方位誤差や航路誤差が生じてしまう。
【0006】
軌道追従方式による開ループ制御を行う技術として、軌道航路の円弧歪みを低減させることができる船舶用自動操舵装置が知られている(特許文献1参照)。この船舶用自動操舵装置は、軌道計画による参照信号の生成と2自由制御系とを用いるものであり、航路保持システムに航路旋回システムを適用して半径一定旋回を実現する。ここで、航路旋回システムは、方位旋回システムに基づいたものである。
【0007】
しかしながら、特許文献1に記載の技術によれば、旋回時のフィードフォワード舵角が実用に適さない程に大きくなる。大きな舵角は、船体に過度な運動を与えるとともに、操舵機に不必要な負担をかける。船体制御において、舵角は必要最小限であることが望ましい。
【先行技術文献】
【特許文献】
【0008】
特開2014-15174号公報
【非特許文献】
【0009】
Wlodzimierz Chocianowicz and Jerzy Pejas. Adaptive control system for steering the ship along the desired trajectory-based on the optimal control and filtering theory.IFAC Proceedings Volumes,25(3):319-335,1992.
KY Pettersen and Henk Nijmeijer.Tracking control of an underactuated surface vessel.In Proceedings of the 37th IEEE Conference on Decision and Control (Cat.No.98CH36171),volume 4,pages 4561-4566.IEEE,1998.
Yong Liu,Renxiang Bu,and Xiaori Gao.Ship trajectory tracking control system design based on sliding mode control algorithm.Polish Maritime Research,25(3):26-34,01 Sep.2018.
T.I.Fossen and T.Perez.Marine systems simulator,basic libraries and system examples for guidance,navigation and control,2008.
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明が解決しようとする課題は、より小さい舵角により半径一定の旋回を実現する技術を提供することである。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東京計器株式会社
操船制御装置
10日前
東京計器株式会社
船舶用自動操舵装置
2か月前
個人
水上遊具
今日
個人
川下り用船
6か月前
個人
発電船
7か月前
個人
シーアンカー
8か月前
個人
船用横揺防止具
3か月前
個人
補助機構
2か月前
個人
コンパクトシティ船
2か月前
小柳建設株式会社
台船
9か月前
個人
渦流動力推進構造
2か月前
ウラカミ合同会社
曳航ロボット
10か月前
炎重工株式会社
浮標
4か月前
炎重工株式会社
浮標
4か月前
個人
水陸両用移動装置
9か月前
炎重工株式会社
移動体
7か月前
個人
船舶
4か月前
個人
スクリュープロペラ
2か月前
株式会社フルトン
水中捕捉装置
2か月前
個人
回転式による流体流出防止タンカー
2か月前
ダイハツ工業株式会社
ジャケット
11か月前
オーケー工業株式会社
係留フック
3か月前
株式会社テラサン
位置保持システム
8か月前
ヤマハ発動機株式会社
船外機
4か月前
スズキ株式会社
船外機
29日前
スズキ株式会社
船外機
2か月前
スズキ株式会社
船外機
2か月前
誠加興業股分有限公司
呼吸用マスク
10か月前
スズキ株式会社
船外機
29日前
常石造船株式会社
メタノール燃料船
5か月前
炎重工株式会社
自律航行浮遊体
4か月前
株式会社ユピテル
システム及びプログラム等
1か月前
川崎汽船株式会社
ドライアイス輸送船
11か月前
株式会社神戸タフ興産
船舶の甲板構造
6か月前
藤倉コンポジット株式会社
架台
5か月前
株式会社大林組
水中潜行システム
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ