TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024103421
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2023007723
出願日
2023-01-22
発明の名称
曳航ロボット
出願人
ウラカミ合同会社
代理人
主分類
B63B
59/10 20060101AFI20240725BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】船体に付着した海生生物を船舶が運航中に海中で簡便に除去する等の作業を行う曳航ロボットを提供する。
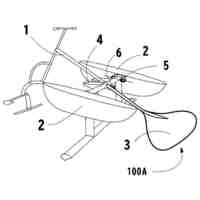
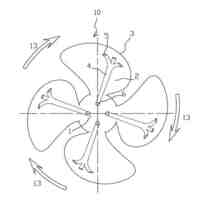
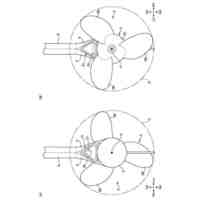
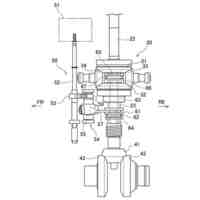
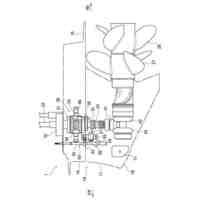
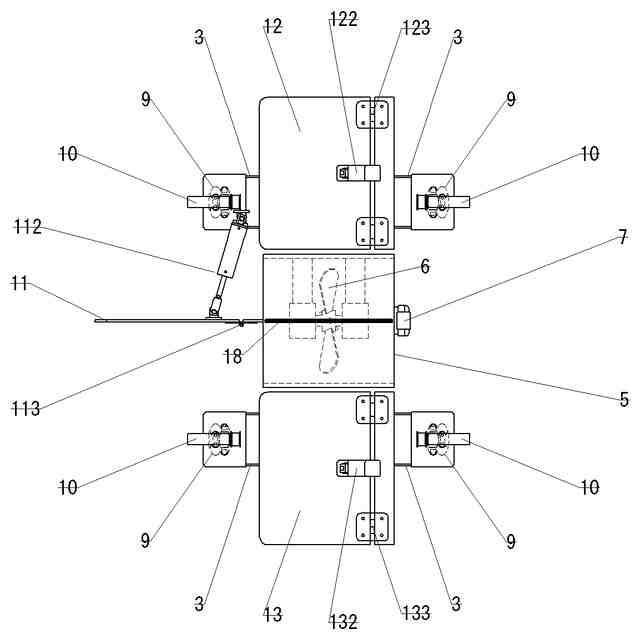
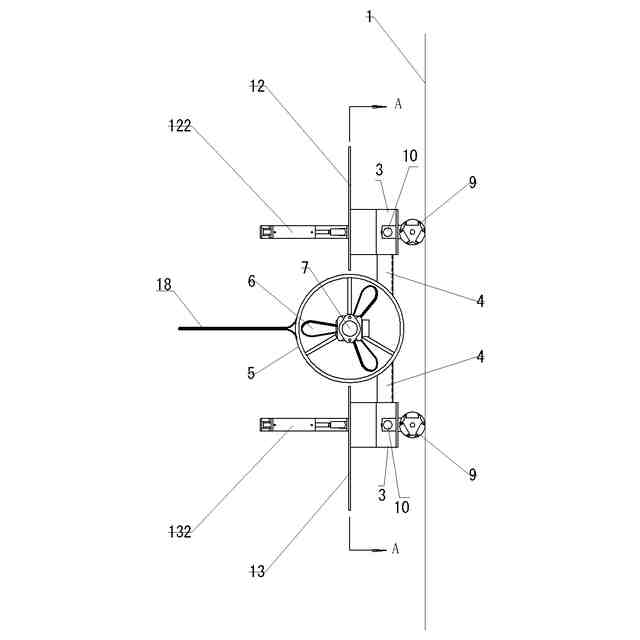
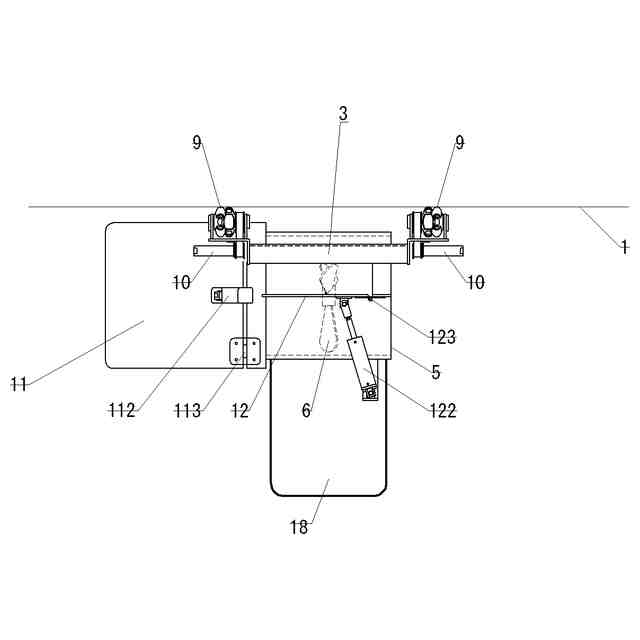
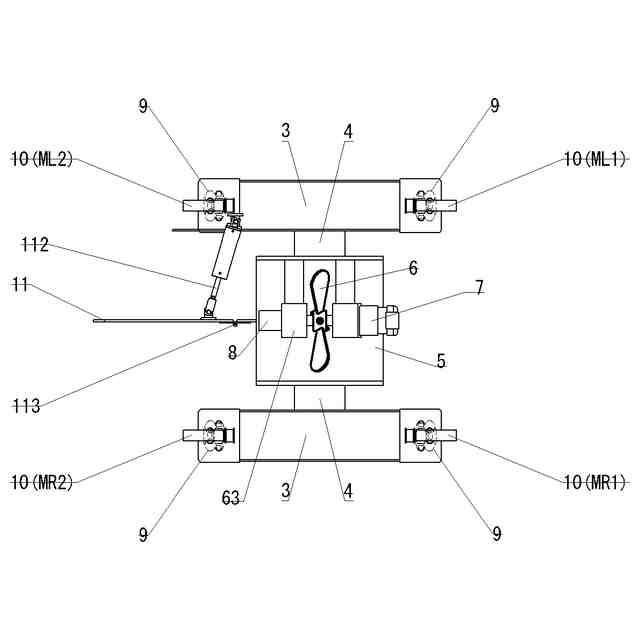
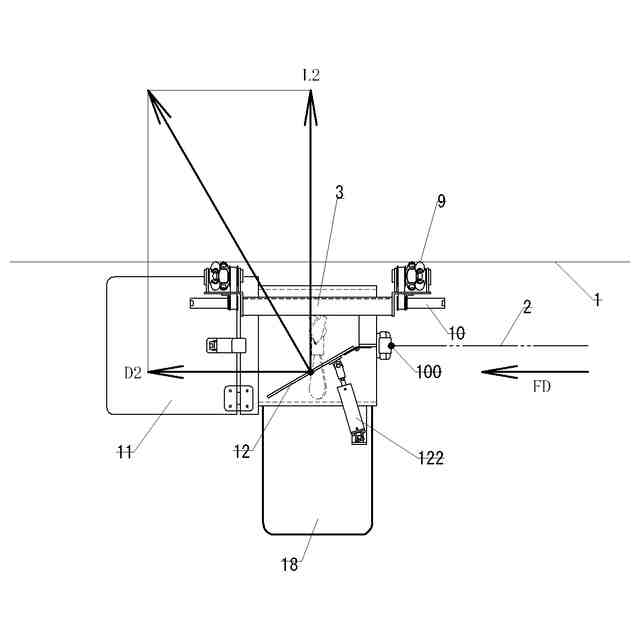
【解決手段】曳航ロボットは、複数の車輪と;車輪を駆動する油圧モータと;船舶の運航による水流により回転されるプロペラと;プロペラに連結された油圧ポンプと;揚力を発生させて曳航ロボットを船体へ押付けて密着させる一対の昇降舵と;揚力を発生させて曳航ロボットの船体に沿っての移動を補助する方向舵:から構成される。
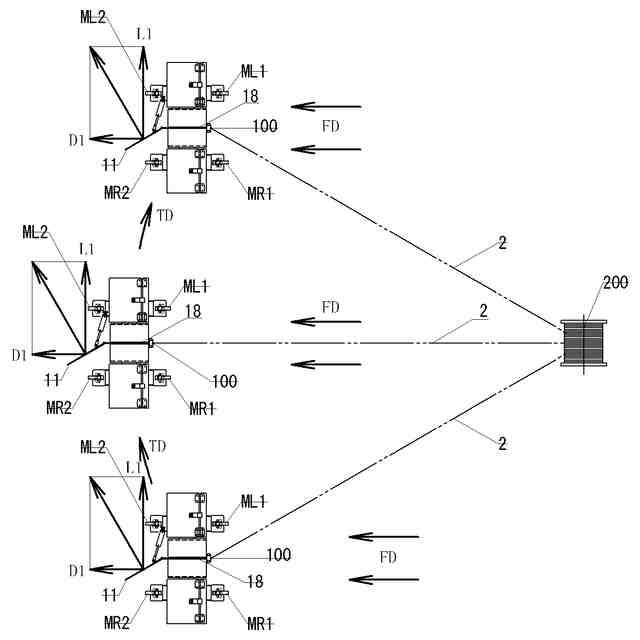
【選択図】図5
特許請求の範囲
【請求項1】
物体表面に沿って且つ流体の流れる方向と交差する方向への駆動力を備える複数の車輪と;
前記の車輪を回転駆動するモータと;
流体の流れる方向と平行な回転軸を備えるプロペラと;
前記のプロペラの回転軸に連結された、作動油などの作動流体に圧力を与えて吐出する油圧ポンプなどの流体圧吐出ポンプ、もしくは、前記のプロペラにより回転されることにより発電する発電機と;
物体表面に平行な面上において、且つ、流体の流れる方向に向かって左右に配置された一対の昇降舵と;
物体表面に直交し、且つ、流体の流れる方向と平行な面上に配置された方向舵と;
物体表面に直交し、且つ、流体の流れる方向と平行な面上に配置された垂直翼;
から少なくとも構成されている;
ことを特徴とする曳航ロボット。
続きを表示(約 1,000 文字)
【請求項2】
流体の流れる領域内に配置され、ロープにより牽引された曳航ロボットにおいて、曳航ロボットが、物体表面へ密着する場合においては、一対の昇降舵の下流側の端部が物体表面から離反する方向へスイングされ、よって、昇降舵に物体表面へ向かう揚力が作用するので曳航ロボットは物体表面へ密着する;ことを特徴とする請求項1に記載の曳航ロボット。
【請求項3】
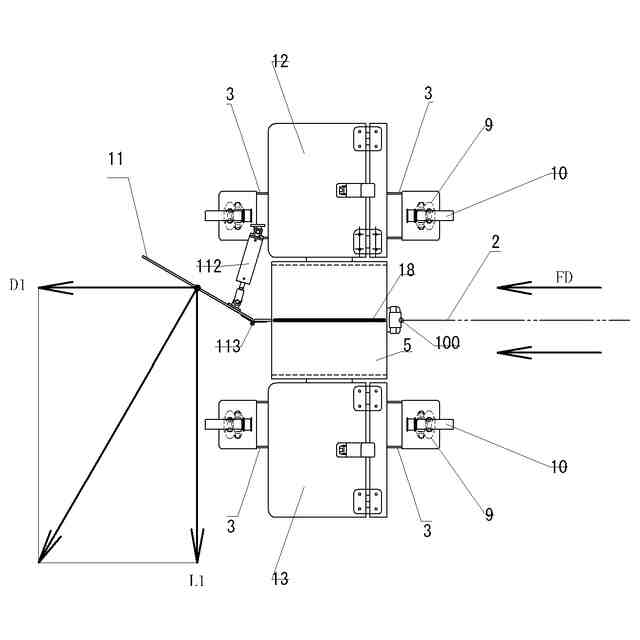
流体の流れる領域内に配置され、ロープにより牽引された曳航ロボットにおいて、曳航ロボットが、物体表面に沿って、且つ、流体の流れる方向と交差する方向へ、且つ、流体の流れる方向に向かって左方向へ移動する場合においては、方向舵が反時計方向へスイングされ、よって、方向舵に流体の流れる方向に向かって左方向への揚力が作用し、一方、曳航ロボットが、物体表面に沿って、且つ、流体の流れる方向と交差する方向へ、且つ、流体の流れる方向に向かって右方向へ移動する場合においては、方向舵が時計方向へスイングされ、よって、方向舵に流体の流れる方向に向かって右方向への揚力が作用する;ことを特徴とする請求項1乃至請求項2に記載の曳航ロボット。
【請求項4】
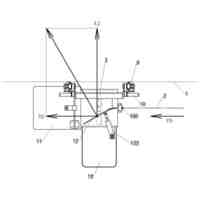
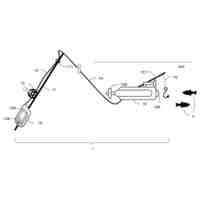
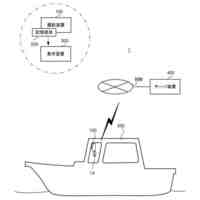
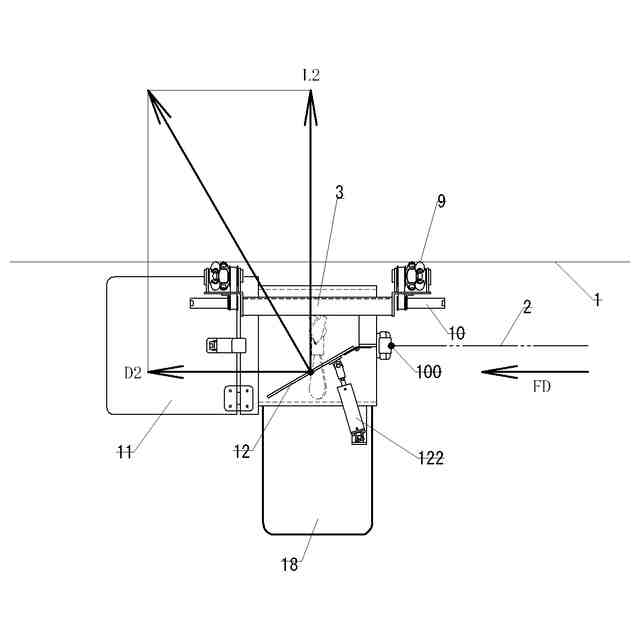
曳航ロボット牽引用ウインチと、キャレッジ下降用ウインチと、キャレッジ上昇用ウインチとが、船体の喫水線の上方に配置されており;
前記キャレッジ下降用ウインチから繰り出されるキャレッジ下降用ロープは、下方へ伸びて、次に、船体の下方に配置されたシーブブロックを通った後に上方へ伸びてキャレッジ下降用ロープ固定部に連結されており;
前記キャレッジ上昇用ウインチから繰り出されるキャレッジ上昇用ロープは、下方へ伸びてキャレッジ上昇用ロープ固定部に連結されており;
キャレッジは、前記キャレッジ下降用ウインチと前記キャレッジ上昇用ウインチの駆動操作により、任意の時に、船体の下方もしくは上方へ、船体に沿って移動させることが可能であり;
前記曳航ロボット牽引用ウインチから繰り出される曳航ロボット牽引ロープは、下方へ伸びて、次に、キャレッジ下流側シーブを通った後に下流側へさらに伸びて曳航ロボットに連結されている;
ことを特徴とする請求項1乃至請求項3に記載の曳航ロボット。
【請求項5】
走行する船体に沿って前記船体と同じ方向へ並走する作業船によって曳航される;ことを特徴とする請求項1乃至請求項3に記載の曳航ロボット。
発明の詳細な説明
【技術分野】
【0001】
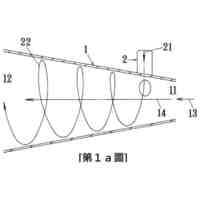
本発明は、船体の水線部や船底部に付着した貝類などの海生生物を、船舶の運航中に除去する等の作業を行う装置に関する。
続きを表示(約 3,100 文字)
【0002】
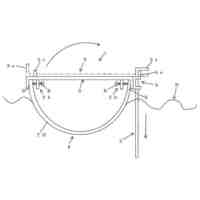
本発明は、さらに、発電所、製鉄所、石油コンビナ-ト、液化ガス基地等において、復水機など各種装置の冷却等のため海水の導入用として設けられている大口径取水管、あるいは送水用として設けられている大口径送水管など、水路の側壁に付着した貝類などの海生生物を、プラントの運用中に除去する等の作業を行う装置に関する。
【背景技術】
【0003】
外航船の船体に付着した貝類などの海生生物は、外国の寄港地の在来生態系に悪影響を与えて寄港地の水産業などに損害を発生させるため、諸外国の一部の国々においては、外航船が寄港する以前に船体に付着した貝類などの海生生物を除去することを法律で義務化している。さらには一部の国々においては、自国領海内において船体に付着した貝類などの海生生物を除去することも法律で禁止している。
従来、船舶が係船されて静止しているときに、船体に付着した貝類などの海生生物を除去する装置は種々提案されているが、一部の国々においては、そもそも自国領海内において船体に付着した海生生物を除去することが法律で禁止されているのであるから、当該の自国領海内において船体に付着した海生生物を除去する装置を使用することも不可能である。
よって、領海外の国際海域において、船体に付着した海生生物を除去する必要があるが、国際海域において船舶を係船して静止させるのは技術的な面などから困難であり、海生生物を除去する期間は船舶を運行できないことに起因する経済的な損害も大きい。
よって、国際海域において船舶を運航中に、船体に付着した海生生物を除去する等の作業を行う装置が必要となるものである。
【0004】
発電所、石油コンビナ-ト、液化ガス基地等においては、各種装置の冷却等のための海水の導入用として、あるいは送水用として大規模な水路が設けられている。この水路には、海水と共に多量の貝および貝卵等が流入するため、流入した貝および貝卵等が水路の側壁に付着し、付着した貝をそのまま放置しておくと、短期間のうちに貝が成長して水路の流路面積が縮小されて流路の圧力損失が増大し、結果として所定の冷却性能等が著しく悪化するという不都合な事態が発生する。
そこで、水路の側壁に付着した貝は、所定の性能に悪化が生じないサイクルで定期的に除去する必要がある。
従来、このような水路の側壁に付着した貝類の除去のために、関係諸装置の作動を一時的に停止して水路内への海水の流入を阻止した後に、水路内に作業員が入り込んで人手により貝類を除去する方法が採用されていた。
【0005】
日本国特許公開平5-285463号は、水中清掃用吸盤に関する発明であるが、水が入ったタンクなどの水中の壁面に吸着して走行する吸着自走台車において、台車の走行方向に向かって左右対称の位置に、回転ブラシなどの複数の回転板が配置され、当該回転板の回転軸を傾けてこの回転板の外周の1点を壁に接触させ、この接触点より受ける反力によって台車を前進させる技術、が開示されている。
日本国特許公開平5-285463
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明においては、国際海域において船舶を運航中に、船体に付着した海生生物を除去する等の作業を行う装置を提案するものである。
【0007】
本発明が解決しようとするさらなる課題について述べると、発電所、石油コンビナ-ト、液化ガス基地等における各種装置の冷却等のための海水の導入用、あるいは送水用の大規模な水路に付着する貝類の除去作業においては、多数の作業員を水路内に投入するために人件費が非常に高くつき、また作業環境も非常に悪い。例えば、水路内の温度、湿度は非常に高く、暗くて滑りやすく、また貝の腐食臭が充満している。
本発明は、上記のような実情に鑑みてなされたもので、水路の側壁に付着した貝類の除去のために関係諸装置の作動を一時的に停止する必要がなく、また、作業環境の悪い水路内に作業員が入り込んで貝類を除去するといった非能率、非衛生的かつ危険な上に作業コストも高い人手による作業を必要とせず、下記の特徴を備えた簡便に貝類を除去することが可能な装置を提供することを目的としている。
(1)貝類の除去のために関係諸装置の作動を一時的に停止する必要が無いので関係諸装置の運転効率を増大できる。
(2)人手による貝類の除去に比べて省力化が図れるので作業コストを低減できる。
(3)リモートコントロールにより貝類を除去するので安全かつ衛生的である。
(4)装置は水路の側壁における任意の場所にクイックリーに移動する機能に優れているので作業能率が向上する。
(5)装置の機構がシンプルで軽量であるため、メンテナンスが容易で、故障や作動不良が発生しにくく、持ち運びが容易である。
(6)設備投資に莫大な費用を要しない。
【課題を解決するための手段】
【0008】
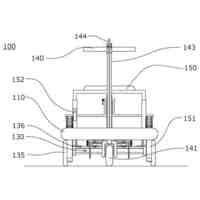
本発明においては上記の技術的解決課題を達成するために;
物体表面に沿って且つ流体の流れる方向と交差する方向への駆動力を備える複数の車輪と;
前記の車輪を回転駆動するモータと;
流体の流れる方向と平行な回転軸を備えるプロペラと;
前記のプロペラの回転軸に連結された、作動油などの作動流体に圧力を与えて吐出する油圧ポンプなどの流体圧吐出ポンプ、もしくは、前記のプロペラにより回転されることにより発電する発電機と;
物体表面に平行な面上において、且つ、流体の流れる方向に向かって左右に配置された一対の昇降舵と;
物体表面に直交し、且つ、流体の流れる方向と平行な面上に配置された方向舵と;
物体表面に直交し、且つ、流体の流れる方向と平行な面上に配置された垂直翼;
から少なくとも構成されている;ことを特徴とする曳航ロボットを提案する。
【0009】
本発明においては上記の技術的解決課題を達成するために更に;
流体の流れる領域内に配置され、ロープにより牽引された曳航ロボットにおいて、曳航ロボットが、物体表面へ密着する場合においては、一対の昇降舵の下流側の端部が物体表面から離反する方向へスイングされ、よって、昇降舵に物体表面へ向かう揚力が作用するので曳航ロボットは物体表面へ密着する;
ことを特徴とする請求項1に記載の曳航ロボットを提案する。
【0010】
本発明においては上記の技術的解決課題を達成するために更に;
流体の流れる領域内に配置され、ロープにより牽引された曳航ロボットにおいて、曳航ロボットが、物体表面に沿って、且つ、流体の流れる方向と交差する方向へ、且つ、流体の流れる方向に向かって左方向へ移動する場合においては、方向舵が反時計方向へスイングされ、よって、方向舵に流体の流れる方向に向かって左方向への揚力が作用し、一方、曳航ロボットが、物体表面に沿って、且つ、流体の流れる方向と交差する方向へ、且つ、流体の流れる方向に向かって右方向へ移動する場合においては、方向舵が時計方向へスイングされ、よって、方向舵に流体の流れる方向に向かって右方向への揚力が作用する;
ことを特徴とする請求項1乃至請求項2に記載の曳航ロボットを提案する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ウラカミ合同会社
曳航ロボット
11か月前
個人
水上遊具
1か月前
個人
川下り用船
7か月前
個人
シーアンカー
10か月前
個人
発電船
8か月前
個人
船用横揺防止具
5か月前
個人
補助機構
4か月前
個人
コンパクトシティ船
3か月前
小柳建設株式会社
台船
10か月前
個人
渦流動力推進構造
3か月前
個人
セールのバテンガイド装置
1日前
ウラカミ合同会社
曳航ロボット
11か月前
炎重工株式会社
浮標
6か月前
個人
水質浄化・集熱昇温システム
22日前
炎重工株式会社
浮標
6か月前
炎重工株式会社
移動体
9か月前
住友重機械工業株式会社
船舶
17日前
個人
水陸両用移動装置
11か月前
個人
船舶
6か月前
個人
スクリュープロペラ
3か月前
株式会社フルトン
水中捕捉装置
4か月前
株式会社ラフティ
サーフボード
8日前
個人
回転式による流体流出防止タンカー
4か月前
オーケー工業株式会社
係留フック
4か月前
誠加興業股分有限公司
呼吸用マスク
11か月前
ヤマハ発動機株式会社
船外機
6か月前
スズキ株式会社
船外機
3か月前
常石造船株式会社
メタノール燃料船
7か月前
スズキ株式会社
船外機
3か月前
株式会社テラサン
位置保持システム
9か月前
スズキ株式会社
船外機
2か月前
スズキ株式会社
船外機
2か月前
株式会社ユピテル
システム及びプログラム等
3か月前
株式会社神戸タフ興産
船舶の甲板構造
7か月前
炎重工株式会社
自律航行浮遊体
6か月前
藤倉コンポジット株式会社
架台
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ