TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024132790
公報種別
公開特許公報(A)
公開日
2024-10-01
出願番号
2023125638
出願日
2023-08-01
発明の名称
位置保持システム
出願人
株式会社テラサン
代理人
個人
主分類
B63C
11/48 20060101AFI20240920BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】線状物体の位置を保持することを可能とする位置保持システムを提供する。
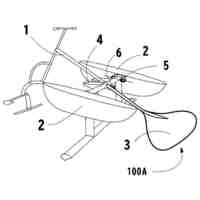
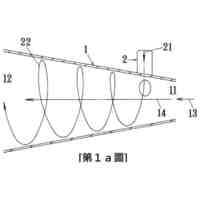
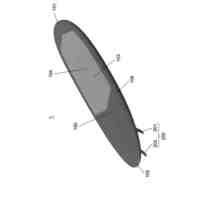
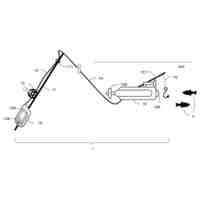
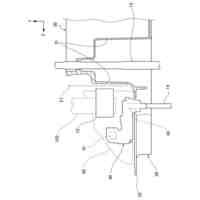
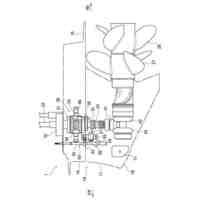
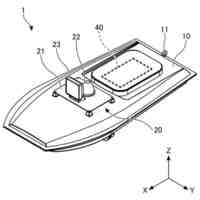
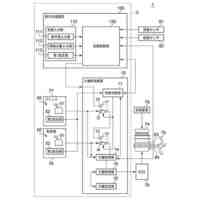
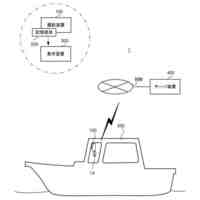
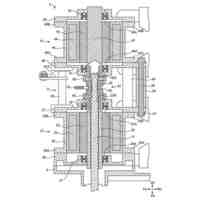
【解決手段】船(14)から水中に降ろされた線状物体(1)の位置を保持するための位置保持システム(100)は、線状物体(1)に固定的に取り付けられた本体部(20)と、推力を発生する複数の推進器(15)と、トランスポンダ(3)と、を備えた、一以上の推進装置(2)と、複数の推進器(15)に動力を供給する動力装置(8)と、複数の推進器(15)の推力を制御する制御装置(9)と、トランスポンダ(3)からの音波を受信する受信器(10)と、船(14)に対する推進装置(2)の相対位置を検出する位置検出装置(11)と、船(14)の現在位置を検出する衛星測位システム(12)と、を備える。制御装置(9)は、推進装置(2)の現在位置に基づいて、複数の推進器(15)の推力を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
船(14)から水中に降ろされた線状物体(1)の位置を保持するための位置保持システム(100)であって、
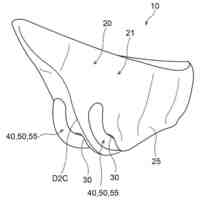
前記線状物体(1)に固定的に取り付けられた本体部(20)と、
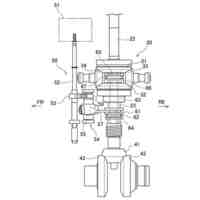
前記本体部(20)に取り付けられ、推力を発生するように構成された複数の推進器(15)と、
前記本体部(20)に取り付けられたトランスポンダ(3)と、
を備えた、一以上の推進装置(2)と、
前記複数の推進器(15)に動力を供給するように構成された動力装置(8)と、
前記複数の推進器(15)の推力を制御するように構成された制御装置(9)と、
前記トランスポンダ(3)からの音波に基づいて、前記船(14)に対する前記推進装置(2)の相対位置を検出するように構成された位置検出装置(11)と、
前記船(14)の現在位置を検出するように構成された衛星測位システム(12)と、
を備え、
前記制御装置(9)は、
前記船(14)に対する前記推進装置(2)の相対位置と、前記船(14)の現在位置とに基づいて、前記推進装置(2)の現在位置を取得し、
前記推進装置(2)の現在位置に基づいて、前記複数の推進器(15)の推力を制御する、
ように構成される、
位置保持システム(100)。
続きを表示(約 1,800 文字)
【請求項2】
前記制御装置(9)は、
前記推進装置(2)の目標位置を設定し、
前記推進装置(2)の現在位置を取得し、
前記現在位置と前記目標位置との間の差に基づいて、前記現在位置が前記目標位置に近づくように前記複数の推進器(15)の推力を制御する、
ように構成される、
請求項1に記載の位置保持システム(100)。
【請求項3】
前記推進装置(2)は、
前記線状物体(1)の先端又は先端付近に固定的に取り付けられた第一推進装置と、
前記第一推進装置から所定距離だけ離れた位置において前記線状物体(1)に固定的に取り付けられた第二推進装置と、
を有し、
前記制御装置(9)は、
前記第一推進装置の第一目標位置を設定し、
前記第一推進装置の第一現在位置を取得し、
前記第一現在位置と前記第一目標位置との間の差に基づいて、前記第一現在位置が前記第一目標位置に近づくように前記第一推進装置の複数の推進器(15)の推力を制御し、
前記第二推進装置の第二目標位置を設定し、
前記第二推進装置の第二現在位置を取得し、
前記第二現在位置と前記第二目標位置との間の差に基づいて、前記第二現在位置が前記第二目標位置に近づくように前記第二推進装置の複数の推進器(15)の推力を制御する、
ように構成される、
請求項2に記載の位置保持システム(100)。
【請求項4】
前記推進装置(2)は、
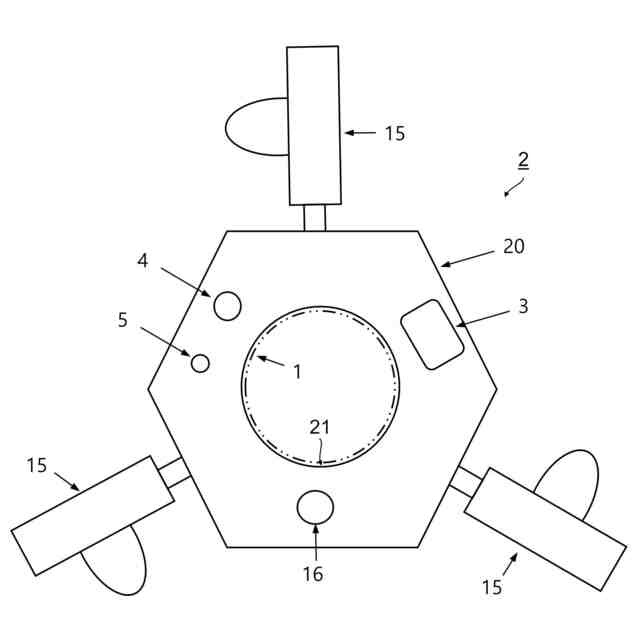
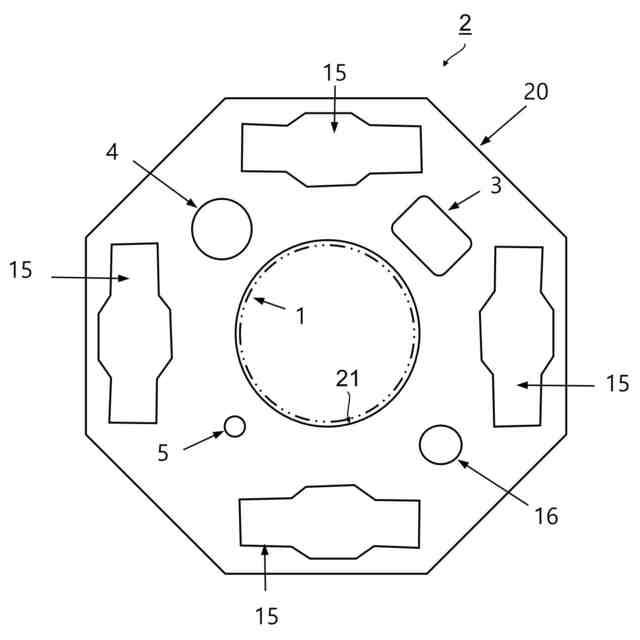
前記本体部(20)に取り付けられ、前記推進装置(2)の方位を計測するように構成された方位計(16)をさらに備え、
前記位置保持システム(100)は、
前記船(14)の方位を計測するように構成された方位計(13)をさらに備え、
前記制御装置(9)は、
前記船(14)の方位と前記推進装置(2)の方位との間の差と、前記推進装置(2)の現在位置とに基づいて、前記複数の推進器(15)の推力を制御する、
ように構成される、
請求項1に記載の位置保持システム(100)。
【請求項5】
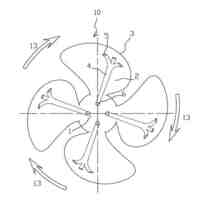
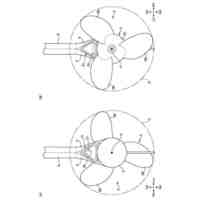
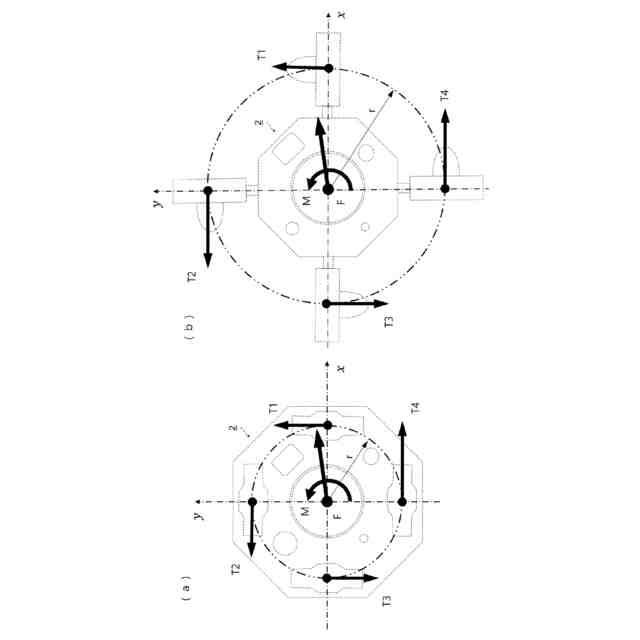
前記複数の推進器(15)の各々は、前記複数の推進器(15)の各々の推力の方向が前記線状物体(1)を中心とする正多角形の複数の辺のうちの対応する一つに略平行となるように、配置されている、
請求項1に記載の位置保持システム(100)。
【請求項6】
前記一以上の推進装置(2)は、複数の推進装置(2)を有し、
前記複数の推進装置(2)は、前記線状物体(1)の長手方向に沿って、互いに離間した状態で、前記線状物体(1)に固定的に取り付けられ、
前記複数の推進装置(2)の一つは、前記線状物体(1)の先端又は先端付近に固定的に取り付けられている、
請求項1に記載の位置保持システム(100)。
【請求項7】
前記位置保持システム(100)は、
前記線状物体(1)の先端又は先端付近に取り付けられ、前記線状物体(1)の先端の周辺環境を示す映像データを取得するように構成されたカメラ(7)をさらに備える、
請求項1に記載の位置保持システム(100)。
【請求項8】
前記位置保持システム(100)は、
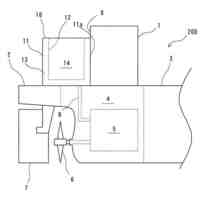
前記動力装置(8)及び前記推進装置(2)に接続されると共に、前記動力装置(8)から供給される動力を前記推進装置(2)に伝送するように構成された動力伝送部材(4)をさらに備える、
請求項1に記載の位置保持システム(100)。
【請求項9】
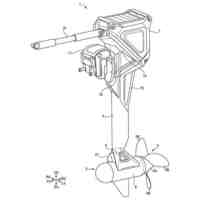
前記複数の推進器(15)の各々は、プロペラ付き電動モータ又は水ジェット推進器である、
請求項1に記載の位置保持システム(100)。
【請求項10】
トランスポンダ(3)からの音波を受信する受信器(10)をさらに備え、
前記位置検出装置(11)は、前記受信器(10)から出力された信号に基づいて、前記船(14)に対する前記推進装置(2)の相対位置を検出するように構成されている、
請求項1に記載の位置保持システム(100)。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置保持システムに関する。特に、本発明は、水中の線状物体の位置を保持する位置保持システムに関し、より具体的には、船から水中に降ろしたホース、パイプ、ケーブルいずれかの線状物体を、海流などの流れの有る中で目標の位置に保持する位置保持システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば海底油田の開発においては、船からライザパイプを海中に降ろして、海底に設けられている噴出防止装置に接続するオペレーションがしばしば行われる。この場合に従来は、パイプの先端の位置をカメラ等で監視しながら船の位置や水面位置でのパイプの角度などを操作して、パイプ先端の位置を制御することが行われている。
【先行技術文献】
【非特許文献】
【0003】
小寺山 亘、中村 昌彦 他4名 著、「ライザー管の動特性を考慮したDPS及びリエントリ制御の実証実験」日本船舶海洋工学会講演会論文集 第4号 2007年
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、波と風と海流の影響を受ける中で、長いパイプの先端を前記の方法で位置合わせするのは極めて困難な作業であり、高い操船の技量と高価な自動船位保持装置を要するばかりでなく、天候の影響を受けて作業ができない場合が多いという問題が有った。特に水深が深くなるほど位置保持は困難と成る。例えば非特許文献1の例では、長さ2500メートルの線状物体の先端の位置を、船の位置や水面における傾きを調整することで制御する手法がとられていた。
【0005】
本発明は、波や風によって動揺する船から水中に降ろした線状物体が海流等によって流される状況であっても、線状物体の位置を保持することを可能とする位置保持システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る位置保持システムは、船(14)から水中に降ろされた線状物体(1)の位置を保持するための位置保持システム(100)であって、前記線状物体(1)に固定的に取り付けられた本体部(20)と、前記本体部(20)に取り付けられ、推力を発生するように構成された複数の推進器(15)と、前記本体部(20)に取り付けられたトランスポンダ(3)と、を備えた、一以上の推進装置(2)と、前記複数の推進器(15)に動力を供給するように構成された動力装置(8)と、前記複数の推進器(15)の推力を制御するように構成された制御装置(9)と、前記トランスポンダ(3)からの音波に基づいて、前記船(14)に対する前記推進装置(2)の相対位置を検出するように構成された位置検出装置(11)と、前記船(14)の現在位置を検出するように構成された衛星測位システム(12)と、を備える。前記制御装置(9)は、前記船(14)に対する前記推進装置(2)の相対位置と、前記船(14)の現在位置とに基づいて、前記推進装置(2)の現在位置を取得し、前記推進装置(2)の現在位置に基づいて、前記複数の推進器(15)の推力を制御する、ように構成される。
【0007】
また、前記制御装置(9)は、前記推進装置(2)の目標位置を設定し、前記推進装置(2)の現在位置を取得し、前記現在位置と前記目標位置との間の差に基づいて、前記現在位置が前記目標位置に近づくように前記複数の推進器(15)の推力を制御する、ように構成されてもよい。
【0008】
また、前記推進装置(2)は、前記線状物体(1)の先端又は先端付近に固定的に取り付けられた第一推進装置と、前記第一推進装置から所定距離だけ離れた位置において前記線状物体(1)に固定的に取り付けられた第二推進装置と、を有しもよい。前記制御装置(9)は、前記第一推進装置の第一目標位置を設定し、前記第一推進装置の第一現在位置を取得し、前記第一現在位置と前記第一目標位置との間の差に基づいて、前記第一現在位置が前記第一目標位置に近づくように前記第一推進装置の複数の推進器(15)の推力を制御し、前記第二推進装置の第二目標位置を設定し、前記第二推進装置の第二現在位置を取得し、前記第二現在位置と前記第二目標位置との間の差に基づいて、前記第二現在位置が前記第二目標位置に近づくように前記第二推進装置の複数の推進器(15)の推力を制御する、ように構成されてもよい。
【0009】
また、前記推進装置(2)は、前記本体部(20)に取り付けられ、前記推進装置(2)の方位を計測するように構成された方位計(16)をさらに備えてもよい。前記位置保持システム(100)は、前記船(14)の方位を計測するように構成された方位計(13)をさらに備えてもよい。前記制御装置(9)は、前記船(14)の方位と前記推進装置(2)の方位との間の差と、前記推進装置(2)の現在位置とに基づいて、前記複数の推進器(15)の推力を制御する、ように構成されてもよい。
【0010】
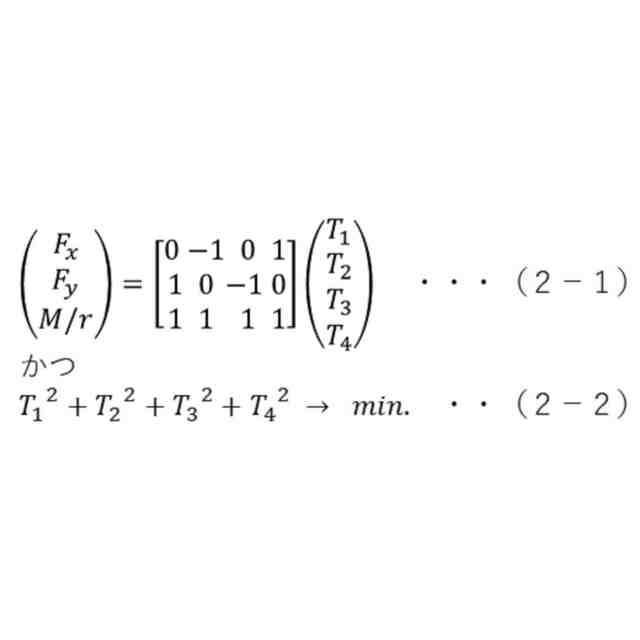
また、前記複数の推進器(15)の各々は、前記複数の推進器(15)の各々の推力の方向が前記線状物体(1)を中心とする正多角形の複数の辺のうちの対応する一つに略平行となるように、配置されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
水上遊具
4か月前
個人
川下り用船
10か月前
個人
洋上研究所
2か月前
個人
発電船
11か月前
個人
補助機構
6か月前
個人
津波防災ウエア
1か月前
個人
船用横揺防止具
7か月前
個人
コンパクトシティ船
6か月前
個人
渦流動力推進構造
6か月前
個人
セールのバテンガイド装置
2か月前
個人
水質浄化・集熱昇温システム
3か月前
炎重工株式会社
浮標
8か月前
炎重工株式会社
浮標
8か月前
炎重工株式会社
移動体
11か月前
住友重機械工業株式会社
船舶
3か月前
個人
船舶
8か月前
株式会社ラフティ
サーフボード
2か月前
株式会社フルトン
水中捕捉装置
6か月前
個人
スクリュープロペラ
6か月前
個人
回転式による流体流出防止タンカー
6か月前
オーケー工業株式会社
係留フック
7か月前
ヤマハ発動機株式会社
船外機
8か月前
株式会社アカデミー出版
船舶
2か月前
スズキ株式会社
船外機
6か月前
朝日電装株式会社
船外機用照明装置
1か月前
スズキ株式会社
船外機
5か月前
株式会社テラサン
位置保持システム
12か月前
スズキ株式会社
船外機
5か月前
スズキ株式会社
船外機
6か月前
常石造船株式会社
メタノール燃料船
9か月前
藤倉コンポジット株式会社
架台
9か月前
株式会社神戸タフ興産
船舶の甲板構造
10か月前
炎重工株式会社
自律航行浮遊体
8か月前
ナブテスコ株式会社
主機制御システム
2日前
株式会社ユピテル
システム及びプログラム等
5か月前
スズキ株式会社
船舶推進機
4か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ