TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078506
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2023191125
出願日
2023-11-08
発明の名称
操船制御装置
出願人
東京計器株式会社
代理人
個人
,
弁理士法人i.PARTNERS特許事務所
主分類
B63H
25/04 20060101AFI20250513BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】舵、スクリュー及びバウスラスタを備える船舶に適した着桟技術を提供する。
【解決手段】船舶を目標位置及び目標方位に誘導する、参照位置の時系列信号である参照軌道と、参照方位の時系列信号である参照信号とを生成する軌道計画部と、参照方位に対する船舶のyaw周りの誤差であるyaw誤差と、参照位置に対する船舶のsway方向の誤差であるsway誤差とを算出する誤差算出部と、yaw誤差を低減させるように舵角を制御するyaw制御部と、sway誤差を低減させるようにバウスラスタを制御するsway制御部と、スクリューを制御するsurge制御部とを有するフィードバック制御部とを備え、surge制御部は、参照軌道において目標位置から所定の逆転距離にある逆転位置に到達していない場合に所定の回転量でスクリューを正回転させ、逆転位置を超えた場合に船体速度がゼロになるまで所定の回転量でスクリューを逆回転させることを特徴とする。
【選択図】図8
特許請求の範囲
【請求項1】
スクリューとバウスラスタとを有する推進駆動装置と、船首方位と船体位置と船体速度とを検出するセンサとを備える船舶を制御する操船制御装置であって、
前記船舶を目標位置及び目標方位に誘導する、参照位置の時系列信号である参照軌道と、参照方位の時系列信号である参照信号とを生成する軌道計画部と、
前記参照方位に対する前記船舶のyaw周りの誤差であるyaw誤差と、前記参照位置に対する前記船舶のsway方向の誤差であるsway誤差とを算出する誤差算出部と、
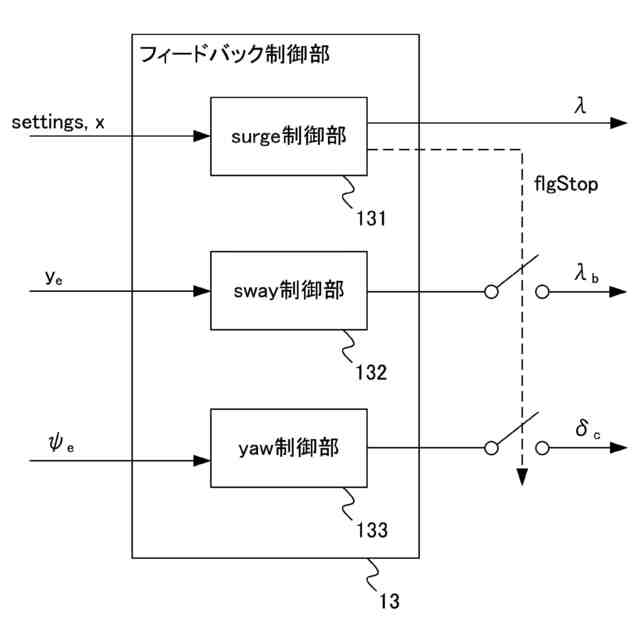
前記yaw誤差を低減させるように舵角を制御するyaw制御部と、前記sway誤差を低減させるように前記バウスラスタを制御するsway制御部と、前記スクリューを制御するsurge制御部とを有するフィードバック制御部とを備え、
前記surge制御部は、前記参照軌道において前記目標位置から所定の逆転距離にある逆転位置に到達していない場合に所定の回転量で前記スクリューを正回転させ、前記逆転位置を超えた場合に前記船体速度がゼロになるまで所定の回転量で前記スクリューを逆回転させることを特徴とする操船制御装置。
続きを表示(約 560 文字)
【請求項2】
前記surge制御部は、前記船体速度がゼロになった場合、前記yaw制御部に前記舵角をゼロにさせるとともに、前記sway制御部に前記バウスラスタの制御量をゼロにさせることを特徴とする請求項1に記載の操船制御装置。
【請求項3】
前記surge制御部は、推定目標値x^
G
が予め設定された閾値以上である場合の前記目標位置までの距離を前記逆転距離として算出し、
tを逆転開始からの時間、u
0
を初期船速、u
rev
<0を逆転時の定常船速、T
u
LR
を逆転時の時定数とし、前記船体速度がゼロになるまでの時間Δtを
JPEG
2025078506000019.jpg
13
170
とし、前記スクリューが逆回転したときの移動力Δxを
JPEG
2025078506000020.jpg
35
170
とすると、前記推定目標値x^
G
は
JPEG
2025078506000021.jpg
7
170
であることを特徴とする請求項1または請求項2に記載の操船制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶を自動操舵する技術に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
自律化船技術として、無人運航船プロジェクトMEGURI2040が知られている(非特許文献1参照)。自律化船技術は様々な技術を含むものであるが、このうち操船技術に関するものとしては、離着桟、衝突回避と物標追尾が挙げられる。
【0003】
離着桟制御に関する先行研究によれば、離着桟時の航路終端近傍で船速が極低速である場合、舵角が最大限まで切られている(非特許文献2参照)。このことは、着桟制御における極低速船体制御の難しさを示している。
【0004】
また、本発明者によるスタンスラスタを利用した制御手法が知られている(非特許文献3参照)。しかしながら、内航船として、スタンスラスタを備えた船舶はあまり普及していない。
【先行技術文献】
【特許文献】
【0005】
Takeru SUZUKI. Challenge of technology development through meguri 2040.https://www.classnk.or.jp.
羽生一成,三好晋太郎,無人運航船の実現に向けた自動着桟制御システムの開発-1軸1舵,バウスラスター1基の自動着桟制御-,No.34,pp.21-24,may 2022.
羽根冬希,Cpp,バウとスタンのスラスタ装備船に位置決め制御を応用した離着桟システムの設計,日本船舶海洋工学会講演会論文集,No.36,pp.1-9,june 2023.
小瀬邦治,湯室彰規,芳村康男,操縦運動の数学モデルの具体化,日本造船学会,第3回操縦性シンポジウム,1981.
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、舵、スクリュー及びバウスラスタを備える船舶に適した着桟技術を提供することである。
【課題を解決するための手段】
【0007】
一実施形態は、スクリューとバウスラスタとを有する推進駆動装置と、船首方位と船体位置と船体速度とを検出するセンサとを備える船舶を制御する操船制御装置であって、前記船舶を目標位置及び目標方位に誘導する、参照位置の時系列信号である参照軌道と、参照方位の時系列信号である参照信号とを生成する軌道計画部と、前記参照方位に対する前記船舶のyaw周りの誤差であるyaw誤差と、前記参照位置に対する前記船舶のsway方向の誤差であるsway誤差とを算出する誤差算出部と、前記yaw誤差を低減させるように舵角を制御するyaw制御部と、前記sway誤差を低減させるように前記バウスラスタを制御するsway制御部と、前記スクリューを制御するsurge制御部とを有するフィードバック制御部とを備え、前記surge制御部は、前記参照軌道において目標位置から所定の逆転距離にある逆転位置に到達していない場合に所定の回転量でスクリューを正回転させ、前記逆転位置を超えた場合に前記船体速度がゼロになるまで所定の回転量でスクリューを逆回転させることを特徴とする。
【図面の簡単な説明】
【0008】
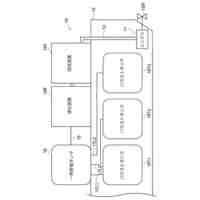
操船制御装置を含む制御システムの全体構成を示すブロック図である。
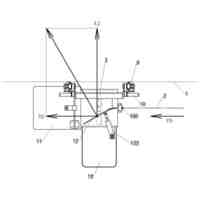
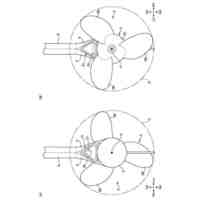
船体モデルを示す図である。
モデル化されたスクリュー回転に対する船速uの時系列応答を示す図である。
モデル化されたスクリュー回転に対する流入速度u
R
の時系列応答を示す図である。
操船制御装置の構成を示すブロック図である。
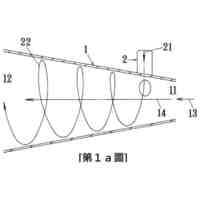
着桟に係る軌道計画を示す図である。
着桟制御における誤差を示す図である。
フィードバック制御部の構成を示すブロック図である。
surge制御部の構成を示すブロック図である。
回転制御処理のアルゴリズムを示す図である。
逆転距離算出処理のアルゴリズムを示す図である。
オンオフ制御処理のアルゴリズムを示す図である。
舵とバウスラスタによる連成運動制御を示す図である。
仕様を満足する軌道計画の結果を示す図である。
スクリュー回転をオンからオフにした結果を示す図である。
スクリュー回転をオンから逆転にした結果を示す図である。
surgeモデルのパラメータを示す図である。
スクリュー回転をオンからオフにした結果から求めたモデルの出力を示す図である。
スクリュー回転をオンから逆転にした結果から求めたモデルの出力を示す図である。
yaw及びswayモデルのパラメータを示す図である。
舵角算出処理のアルゴリズムを示す図である。
外乱がない場合のシミュレーションによる船体位置及び船体方位を示す図である。
外乱がない場合のシミュレーションによる船体運動を示す図である。
外乱がない場合のシミュレーションによる姿勢誤差を示す図である。
外乱がない場合のシミュレーションによる制御量を示す図である。
第1の外乱がある場合のシミュレーションによる船体位置及び船体方位を示す図である。
第1の外乱がある場合のシミュレーションによる船体運動を示す図である。
第1の外乱がある場合のシミュレーションによる姿勢誤差を示す図である。
第1の外乱がある場合のシミュレーションによる制御量を示す図である。
第2の外乱がある場合のシミュレーションによる船体位置及び船体方位を示す図である。
第2の外乱がある場合のシミュレーションによる船体運動を示す図である。
第2の外乱がある場合のシミュレーションによる姿勢誤差を示す図である。
第2の外乱がある場合のシミュレーションによる制御量を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら、本発明の実施形態について説明する。
【0010】
(1 制御システム)
本実施形態に係る操船制御装置を含む制御システムについて説明する。図1は、操船制御装置を含む制御システムの全体構成を示すブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東京計器株式会社
吸着装置
17日前
東京計器株式会社
レーダ駆動装置
20日前
個人
水上遊具
1か月前
個人
川下り用船
8か月前
個人
洋上研究所
5日前
個人
発電船
9か月前
個人
シーアンカー
10か月前
個人
補助機構
4か月前
個人
船用横揺防止具
5か月前
個人
コンパクトシティ船
4か月前
小柳建設株式会社
台船
11か月前
個人
渦流動力推進構造
4か月前
個人
セールのバテンガイド装置
17日前
ウラカミ合同会社
曳航ロボット
12か月前
炎重工株式会社
浮標
6か月前
個人
水質浄化・集熱昇温システム
1か月前
炎重工株式会社
浮標
6か月前
個人
水陸両用移動装置
11か月前
住友重機械工業株式会社
船舶
1か月前
炎重工株式会社
移動体
9か月前
個人
船舶
6か月前
株式会社フルトン
水中捕捉装置
4か月前
株式会社ラフティ
サーフボード
24日前
個人
スクリュープロペラ
4か月前
オーケー工業株式会社
係留フック
5か月前
個人
回転式による流体流出防止タンカー
4か月前
ヤマハ発動機株式会社
船外機
6か月前
株式会社テラサン
位置保持システム
9か月前
スズキ株式会社
船外機
4か月前
スズキ株式会社
船外機
4か月前
スズキ株式会社
船外機
2か月前
スズキ株式会社
船外機
2か月前
株式会社アカデミー出版
船舶
3日前
常石造船株式会社
メタノール燃料船
7か月前
誠加興業股分有限公司
呼吸用マスク
12か月前
株式会社ユピテル
システム及びプログラム等
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ