TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024099129
公報種別
公開特許公報(A)
公開日
2024-07-25
出願番号
2023002837
出願日
2023-01-12
発明の名称
開閉チャック装置
出願人
株式会社ハーモ
代理人
個人
主分類
B25J
15/08 20060101AFI20240718BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
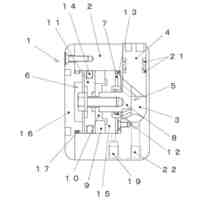
【課題】一対のフィンガを直線的に動作させてフィンガでワークを把持する開閉チャック装置において、ワークを把持するワーク把持位置に一対のフィンガが配置されているのか、それとも、ワーク把持位置から外れた位置に一対のフィンガが配置されているのかの検知精度を高めることが可能な開閉チャック装置を提供する。
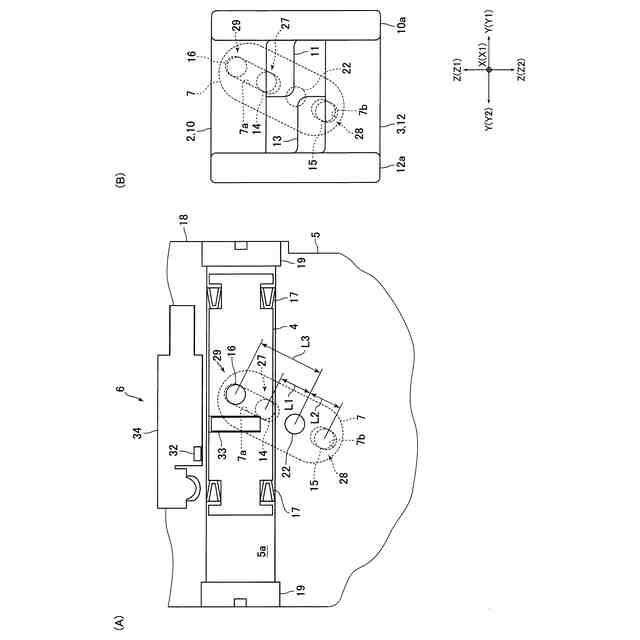
【解決手段】この開閉チャック装置では、本体部5に回動可能に保持されるレバー部材7とフィンガ2、3のそれぞれとは第1係合部27、28で係合し、フィンガ2、3を動作させるためのピストン4とレバー部材7とは第2係合部29で係合している。ピストン4には、フィンガ2、3の位置を検知するための被検知部33が取り付けられている。本体部5に対するレバー部材7の回動中心となる回動中心軸22の軸方向から見たときに、第2係合部29と回動中心軸22との距離は、第1係合部27、28と回動中心軸22との距離よりも長くなっている。
【選択図】図3
特許請求の範囲
【請求項1】
ワークを把持するための一対のフィンガと、一対の前記フィンガが互いに逆方向に移動するように一対の前記フィンガを直線的に動作させるためのピストンと、前記ピストンが配置されるシリンダが内部に形成されるとともに一対の前記フィンガおよび前記ピストンを移動可能に保持する本体部と、前記本体部に対する一対の前記フィンガの位置を検知するための検知機構と、前記本体部に回動可能に保持されるレバー部材とを備え、
一対の前記フィンガのそれぞれと前記レバー部材とは、第1係合部で係合し、
前記ピストンと前記レバー部材とは、第2係合部で係合し、
2個の前記第1係合部は、前記本体部に対する前記レバー部材の回動中心となる回動中心軸を挟んで配置され、
前記ピストンの往復移動方向と前記回動中心軸の軸方向とは、直交しており、
前記ピストンが移動すると、前記レバー部材が回動して一対の前記フィンガが動作し、
前記検知機構は、前記本体部および前記ピストンのいずれか一方に取り付けられるセンサと、前記本体部および前記ピストンのいずれか他方に取り付けられるとともに前記センサによって検知される被検知部とを備え、
前記回動中心軸の軸方向から見たときに、2個の前記第1係合部のうちの一方の前記第1係合部と前記回動中心軸との距離と、他方の前記第1係合部と前記回動中心軸との距離は、等しくなっており、前記第2係合部と前記回動中心軸との距離は、前記第1係合部と前記回動中心軸との距離よりも長くなっていることを特徴とする開閉チャック装置。
続きを表示(約 500 文字)
【請求項2】
前記回動中心軸の軸方向から見たときに、前記第2係合部と前記回動中心軸との距離は、前記第1係合部と前記回動中心軸との距離の2倍になっていることを特徴とする請求項1記載の開閉チャック装置。
【請求項3】
前記ピストンの往復移動方向と前記回動中心軸の軸方向とに直交する方向を第1方向とすると、
前記フィンガは、前記ワークに接触する爪部を有する爪部材を備え、
前記爪部は、前記回動中心軸の軸方向における前記本体部の一方側に配置され、
前記検知機構は、前記センサまたは前記被検知部を保持するとともに前記本体部に取り付けられるホルダを備え、
前記本体部には、前記ホルダが配置されるとともに前記ピストンの往復移動方向を長手方向とする配置溝が形成され、
前記ホルダは、ネジによって前記配置溝に固定され、
前記ピストンの往復移動方向から見たときに、前記配置溝は、前記回動中心軸の軸方向および前記第1方向に対して傾いた方向で開口し、前記ネジの軸心は、前記配置溝の開口部を通過していることを特徴とする請求項1または2記載の開閉チャック装置。
発明の詳細な説明
【技術分野】
【0001】
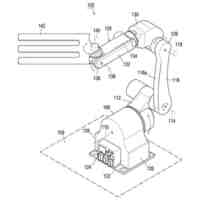
本発明は、ロボットのハンド等に取り付けられて使用される開閉チャック装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、ロボットのハンド等に取り付けられて使用される開閉チャック装置が知られている(たとえば、特許文献1参照)。特許文献1に記載の開閉チャック装置は、一対のフィンガの開閉動作を行って一対のフィンガでワークを把持する。この開閉チャック装置は、フィンガが固定されるシリンダ体と、シリンダ体が収容されるケーシングと、シリンダ体に形成されるシリンダに挿入されるピストンとを備えている。ピストンは、ケーシングに固定されている。ピストンには、流体導入口が形成されている。シリンダ体は、ピストンおよびケーシングに対して直線的に移動可能となっている。
【0003】
また、特許文献1に記載の開閉チャック装置は、ケーシングに対して回動可能に保持されるカムを備えている。ケーシングには、カムの中心部が回動可能に保持されている。カムの一端部は、2個のシリンダ体のうちの一方のシリンダ体に形成される係合部に係合し、カムの他端部は、他方のシリンダ体に形成される係合部に係合している。特許文献1に記載の開閉チャック装置では、2個のピストンのうちの一方のピストンの流体導入口に圧縮空気が供給されると、一対のフィンガが互いに近づくように一対のシリンダ体が移動し、他方のピストンの流体導入口に圧縮空気が供給されると、一対のフィンガが互いに離れるように一対のシリンダ体が移動する。
【先行技術文献】
【特許文献】
【0004】
実用新案登録第2521802号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の開閉チャック装置では、一対のフィンガがワークを把持しているのか否かを検知するために、ケーシングに対するフィンガの位置が検知されることがある。この場合には、たとえば、一方のフィンガまたはシリンダ体に固定される永久磁石と、ケーシングに固定される磁気センサとによって、ワークを把持するワーク把持位置に一対のフィンガが配置されているのか、それとも、ワーク把持位置から外れた位置に一対のフィンガが配置されているのかを検知すれば良いが、一対のフィンガがワーク把持位置に配置されているのか、それとも、ワーク把持位置から外れた位置に配置されているのかの検知精度は高いことが好ましい。
【0006】
そこで、本発明の課題は、一対のフィンガを直線的に動作させて一対のフィンガでワークを把持する開閉チャック装置において、ワークを把持するワーク把持位置に一対のフィンガが配置されているのか、それとも、ワーク把持位置から外れた位置に一対のフィンガが配置されているのかの検知精度を高めることが可能な開閉チャック装置を提供することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するため、本発明の開閉チャック装置は、ワークを把持するための一対のフィンガと、一対のフィンガが互いに逆方向に移動するように一対のフィンガを直線的に動作させるためのピストンと、ピストンが配置されるシリンダが内部に形成されるとともに一対のフィンガおよびピストンを移動可能に保持する本体部と、本体部に対する一対のフィンガの位置を検知するための検知機構と、本体部に回動可能に保持されるレバー部材とを備え、一対のフィンガのそれぞれとレバー部材とは、第1係合部で係合し、ピストンとレバー部材とは、第2係合部で係合し、2個の第1係合部は、本体部に対するレバー部材の回動中心となる回動中心軸を挟んで配置され、ピストンの往復移動方向と回動中心軸の軸方向とは、直交しており、ピストンが移動すると、レバー部材が回動して一対のフィンガが動作し、検知機構は、本体部およびピストンのいずれか一方に取り付けられるセンサと、本体部およびピストンのいずれか他方に取り付けられるとともにセンサによって検知される被検知部とを備え、回動中心軸の軸方向から見たときに、2個の第1係合部のうちの一方の第1係合部と回動中心軸との距離と、他方の第1係合部と回動中心軸との距離は、等しくなっており、第2係合部と回動中心軸との距離は、第1係合部と回動中心軸との距離よりも長くなっていることを特徴とする。
【0008】
本発明の開閉チャック装置では、本体部に回動可能に保持されるレバー部材と一対のフィンガのそれぞれとは第1係合部で係合し、ピストンとレバー部材とは第2係合部で係合している。また、本発明では、本体部に対するレバー部材の回動中心となる回動中心軸の軸方向から見たときに、第2係合部と回動中心軸との距離は、第1係合部と回動中心軸との距離よりも長くなっており、フィンガが動作するときのフィンガの移動量よりもピストンの移動量が大きくなっている。そのため、本発明では、フィンガが動作するときに、ピストンに取り付けられるセンサまたは被検知部の移動量を大きくすることが可能になる。
【0009】
したがって、本発明では、ワーク把持位置に一対のフィンガが配置されているときのセンサまたは被検知部の位置と、ワーク把持位置から外れた位置に一対のフィンガが配置されているときのセンサまたは被検知部の位置との間の距離を長くすることが可能になる。そのため、本発明では、一対のフィンガがワーク把持位置に配置されているのか、それとも、ワーク把持位置から外れた位置に配置されているのかに応じて、検知機構のオンオフ動作を明確に行わせることが可能になる。その結果、本発明では、一対のフィンガがワーク把持位置に配置されているのか、それとも、ワーク把持位置から外れた位置に配置されているのかの検知精度を高めることが可能になる。
【0010】
なお、センサまたは被検知部がフィンガに取り付けられていても、フィンガ自体の移動量を大きくすれば、ワーク把持位置に一対のフィンガが配置されているときのセンサまたは被検知部の位置と、ワーク把持位置から外れた位置に一対のフィンガが配置されているときのセンサまたは被検知部の位置との間の距離を長くすることが可能になる。しかしながら、この場合には、フィンガの移動量が大きくなるため、開閉チャック装置が大型化しやすくなる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
3日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
11日前
株式会社ダイヘン
搬送装置
3か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
制御装置
3か月前
川崎重工業株式会社
ロボットアーム
11日前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
2か月前
SMC株式会社
グリッパ
4か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットアーム
11日前
日本車輌製造株式会社
締め付け工具
11日前
川崎重工業株式会社
ロボットリスト
11日前
川崎重工業株式会社
ロボット
3か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
CKD株式会社
吸着型搬送装置
25日前
川崎重工業株式会社
ロボットシステム
11日前
学校法人立命館
ロボットハンド
2か月前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
ジヤトコ株式会社
圧入装置
24日前
長堀工業株式会社
締結装置
1か月前
株式会社アイエイアイ
グリッパー
2か月前
川崎重工業株式会社
塗装ロボット
1か月前
トヨタ自動車株式会社
ロボットチャック
4か月前
株式会社デンソーウェーブ
産業用ロボット
4か月前
中国電力株式会社
ボルト共回り防止用工具
4か月前
株式会社スター精機
ワーク搬送装置
今日
株式会社不二越
垂直多関節ロボット
3か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ