TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024145983
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058629
出願日
2023-03-31
発明の名称
産業用ロボット
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
13/08 20060101AFI20241004BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】産業用ロボットの基本性能の低下を抑えつつ、ダイレクトティーチング時のアシスト機能の向上に寄与すること。
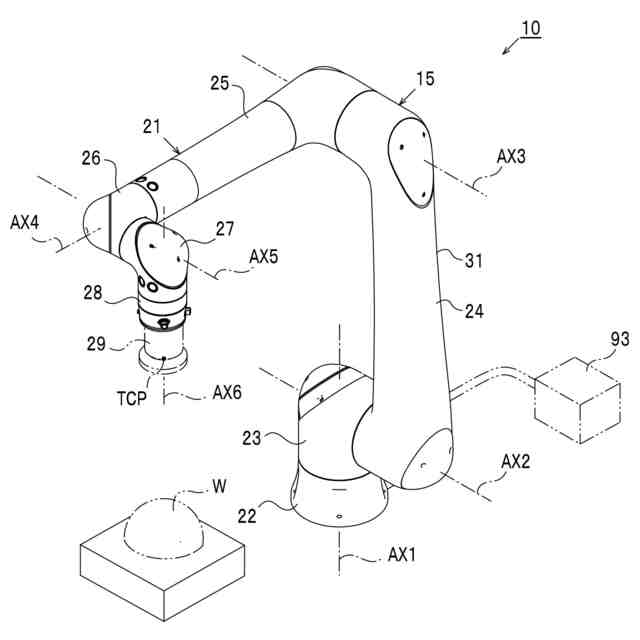
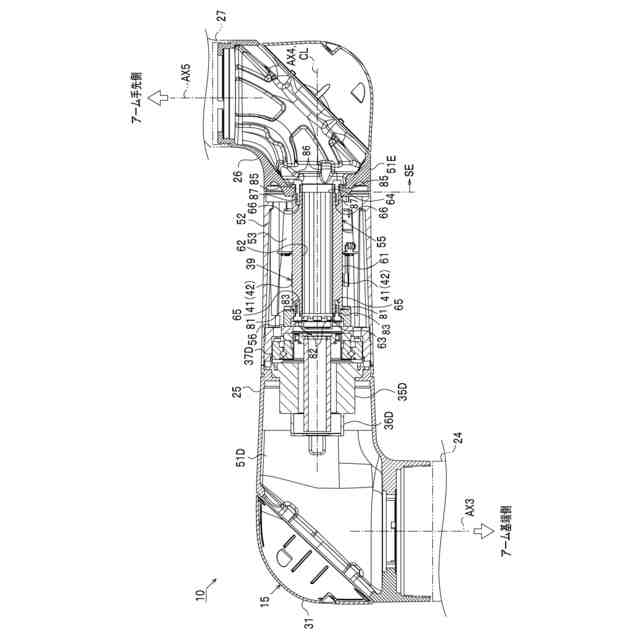
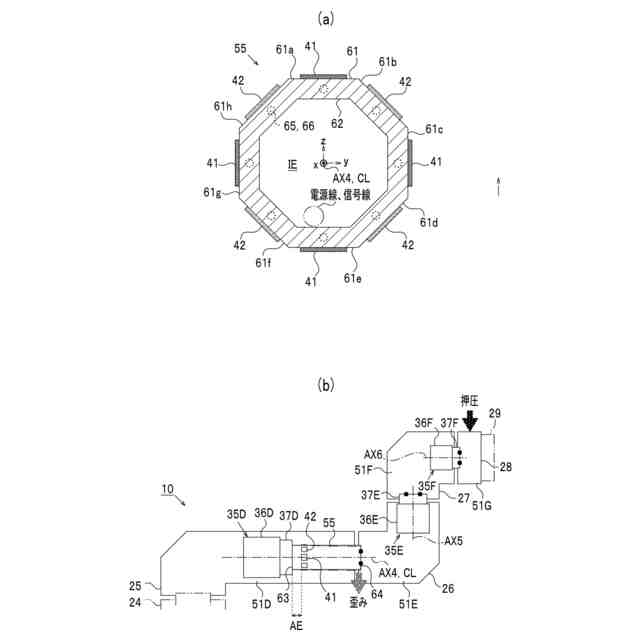
【解決手段】ロボット15は、第1上アーム部25及び第2上アーム部26を含む複数のアーム構成体が一連となるようにして連結されたアーム31と、ダイレクトティーチングに際してロボット15に作用する外力を検出可能な力覚センサ39とを備えている。第1上アーム部25のハウジング51Dにはモータユニット35Dが固定されており、このモータユニット35Dと第2アーム部26のハウジング51Eとは、アーム31の長手方向に延びる動力伝達シャフト55を介して連結されている。この動力伝達シャフト55の外周面61には、引張圧縮歪みゲージ41とせん断歪みゲージ42とが取り付けられており、それら引張圧縮歪みゲージ41及びせん断歪みゲージ42によって上記力覚センサ39が構成されている。
【選択図】 図4
特許請求の範囲
【請求項1】
複数のアーム構成体が一連となるようにして連結されたアーム及び当該アームの関節部を駆動させる駆動機構を有してなるロボット本体と、前記ロボット本体を制御する制御装置とを備えている産業用ロボットであって、
前記複数のアーム構成体として、第1アーム構成体と、当該第1アーム構成体に対して前記ロボット本体の手先側に位置する第2アーム構成体とを含み、
前記駆動機構は、
前記第1アーム構成体に固定され、アクチュエータ及び当該アクチュエータに付属の減速機を有してなる駆動部と、
前記減速機と前記第2アーム構成体とに固定されることにより前記第1アーム構成体と前記第2アーム構成体とを連結する連結部の一部を構成し、前記駆動部からの動力を前記第2アーム構成体に伝達する動力伝達シャフトと
を有し、
前記動力伝達シャフトに取り付けられ、当該動力伝達シャフトに生じる歪みを検出可能な複数の歪みゲージを備え、
前記制御装置は、それら歪みゲージからの検出信号に基づいて、前記ロボット本体に作用する外力の大きさ及び向きを特定する特定部(ロボットコントローラ93にてステップS102の処理を実行する機能)を有し、前記特定部による特定結果に基づいて前記駆動部の駆動制御を行う産業用ロボット。
続きを表示(約 340 文字)
【請求項2】
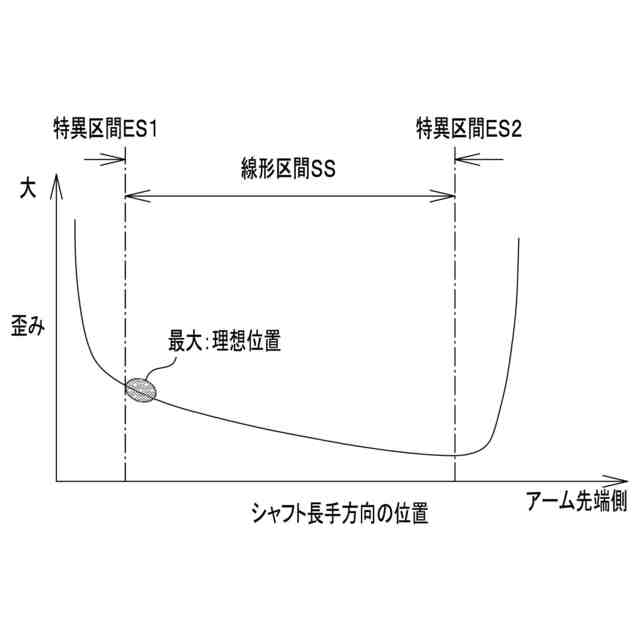
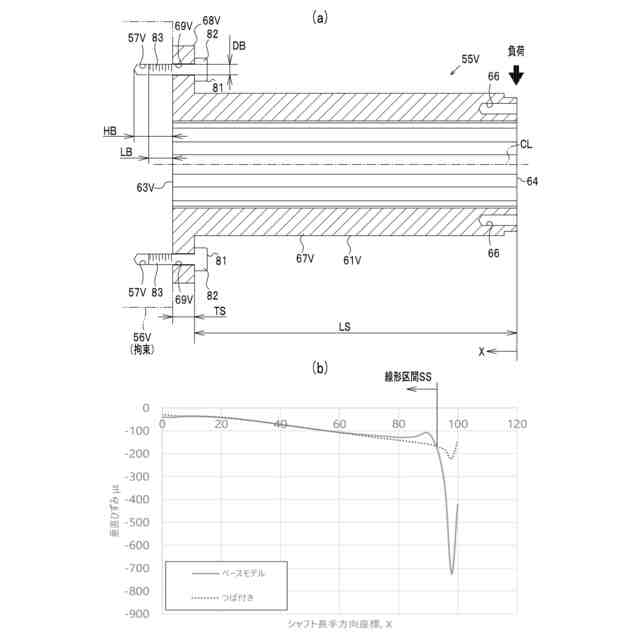
前記歪みゲージは、前記動力伝達シャフトにおいて、前記減速機への固定部分と、前記第2アーム構成体への固定部分との間となる部分であって且つ前記減速機への固定部分側へ偏倚するようにして配置されている請求項1に記載の産業用ロボット。
【請求項3】
前記歪みゲージは、前記動力伝達シャフトにおいて前記減速機への固定部分の近傍から離れた部分に配置されている請求項2に記載の産業用ロボット。
【請求項4】
前記動力伝達シャフトは、中空となっており、
前記動力伝達シャフトの内外の一方に前記駆動機構を構成する駆動部用の配線が配設され、他方に前記歪みゲージが配設されている請求項1乃至請求項3のいずれか1つに記載の産業用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボットに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
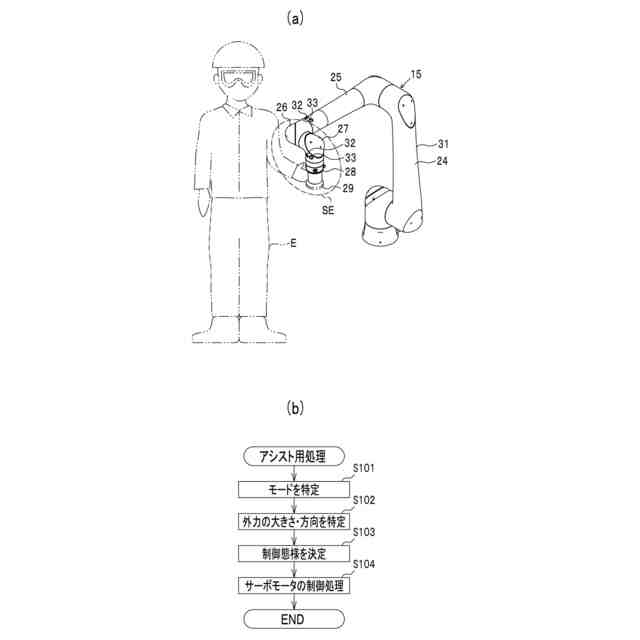
従来、多関節型ロボット等の産業用ロボットをティーチングする際には、ティーチングペンダント等の操作端末を用いて動作プログラムを作成する手法が採用されていた。しかしながら、このような手法ではロボットに対して直観的に指示を行うことができず、不慣れなユーザでは所望の動きを実現するための時間が多大になるという問題があった。近年では、ティーチングの効率化等を実現すべく、産業用ロボットを作業者が直接触って教示する手法(所謂ダイレクトティーチング)が提案されている。
【0003】
この種のティーチングを行う場合には、エンドエフェクタとアームの先端部との間に力覚センサ(例えば図12の力覚センサ100参照)を配設し、ユーザが産業用ロボットの手先を把持して押し引きした場合に、当該力覚センサにより検出した外力に応じて産業用ロボットの動作を制御するといった方法が用いられることがある(例えば、特許文献1及び特許文献2参照)。産業用ロボットの駆動部には減速機が併設されていることが多く、上述したように産業用ロボットを動作させてユーザをアシストすることは、作業効率の向上等を実現する上で効果的である。
【先行技術文献】
【特許文献】
【0004】
特開平11-231925号公報
特開2020-203374号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、一般的な力覚センサは歪みの検出を容易とすべく意図的に剛性を下げた起歪体を具備する仕組みとなっているため、高負荷への対応が難しくなる。また、剛性の低下によって、産業用ロボットを高速で動作させた際に手先に振動が生じやすくなり、高速動作や高精度動作も難しくなる。つまり、産業用ロボットの基本性能(例えば可搬能力、動作速度、動作精度)が低下しやすくなる。このように、産業用ロボットの基本性能の低下を抑えつつ、ダイレクトティーチング時のアシスト機能を向上させる上で、外力の検出に係る構成に未だ改善の余地がある。
【0006】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、産業用ロボットの基本性能の低下を抑えつつ、ダイレクトティーチング時のアシスト機能の向上に寄与することにある。
【課題を解決するための手段】
【0007】
以下、上記課題を解決するための手段について記載する。
【0008】
第1の手段.複数のアーム構成体(第1上アーム部25や第2上アーム部26)が一連となるようにして連結されたアーム(アーム31)及び当該アームの関節部(第1関節部~第6関節部)を駆動させる駆動機構(モータユニット35や動力伝達シャフト55)を有してなるロボット本体(ロボット本体21)と、前記ロボット本体を制御する制御装置(ロボットコントローラ93)とを備えている産業用ロボット(ロボット15)であって、
前記複数のアーム構成体として、第1アーム構成体(第1上アーム部25)と、当該第1アーム構成体に対して前記ロボット本体の手先側に位置する第2アーム構成体(第2上アーム部26)とを含み、
前記駆動機構は、
前記第1アーム構成体に固定され、アクチュエータ(サーボモータ36D)及び当該アクチュエータに付属の減速機(減速機37D)を有してなる駆動部(モータユニット35D)と、
前記減速機と前記第2アーム構成体とに固定されることにより前記第1アーム構成体と前記第2アーム構成体とを連結する連結部の一部を構成し、前記駆動部からの動力を前記第2アーム構成体に伝達する動力伝達シャフト(動力伝達シャフト55)と
を有し、
前記動力伝達シャフトに取り付けられ、当該動力伝達シャフトに生じる歪みを検出可能な複数の歪みゲージ(歪みゲージ41,42)を備え、
前記制御装置は、それら歪みゲージからの検出信号に基づいて、前記ロボット本体に作用する外力の大きさ及び向きを特定する特定部(ロボットコントローラ93にてステップS102の処理を実行する機能)を有し、前記特定部による特定結果に基づいて前記駆動部の駆動制御を行う。
【0009】
動力伝達シャフトについては手先側の構成を支えるべく相応の剛性が確保される部品であり、起歪体等のように意図的に剛性を下げることで歪みを大きく発生させるための部品ではない。つまり、ダイレクトティーチング時にロボット本体が押し引きされる等してその外力が動力伝達シャフトに伝わったとしても、発生する歪みは微小となる。本特徴に示すように、動力伝達シャフトに歪みゲージを取り付ける構成とすれば、従来のように起歪体を具備する力覚センサをアームの先端に装着する構成と比較して、ロボット本体の剛性低下や手先重量の増加等を抑制できる。これは、産業用ロボットにおける移動速度や可搬重量等の基本性能の低下を抑える上で好ましい。なお、重量が嵩む駆動部の位置を動力伝達シャフトを用いることでアームの基端側へシフトさせることができるため、寧ろ基本性の強化に寄与し得るとも言える。
【0010】
また、手先に力覚センサを装着した場合、当該力覚センサよりもアームの基端側を押し引きした場合には、外力の特定が困難になる。つまり、力覚センサによる特定機能を上手く発揮させる上では、ユーザの把持位置に係る制約が強くなる。この点、本特徴に示すように動力伝達シャフトに歪みゲージを取り付ける構成によれば、ロボット本体の手先から離れた位置で外力を特定することができるため、ユーザの把持位置に係る制約の緩和に寄与できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
5か月前
個人
関節モジュール
4か月前
個人
寸切りボルト回し
4か月前
個人
スロットルトリガー
4か月前
株式会社エビス
連結具
1か月前
太陽工業株式会社
チャック装置
4か月前
コクヨ株式会社
補助器具
4か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
衝撃工具
6か月前
個人
メンテナンス用スタンド
6か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
打撃工具
2か月前
トヨタ自動車株式会社
ロボット
5か月前
CKD株式会社
把持装置
4か月前
学校法人立命館
グリッパ
4か月前
オムロン株式会社
電動把持工具
4か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
1か月前
東京計器株式会社
接触検知装置
5か月前
個人
容器引っ掛け棒およびその使用方法
6か月前
株式会社ハーモ
開閉チャック装置
5か月前
株式会社ダイヘン
搬送装置
2か月前
白山工業株式会社
ロボットアーム
4か月前
株式会社ダイヘン
搬送装置
3か月前
個人
回転工具およびバリ取り部品
5か月前
株式会社ダイヘン
制御装置
2か月前
株式会社マキタ
電動ハンマ
2か月前
株式会社エビス
携帯付属物取付具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社大林組
ロッカー装置
5か月前
トヨタ自動車株式会社
締付判定方法
5か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
ハンマドリル
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ