TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024086090
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022201003
出願日
2022-12-16
発明の名称
衝撃工具
出願人
日東工器株式会社
代理人
個人
主分類
B25D
17/24 20060101AFI20240620BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】打撃機構の振動がハウジングにより伝わりにくいようにした衝撃工具を提供すること。
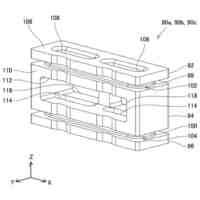
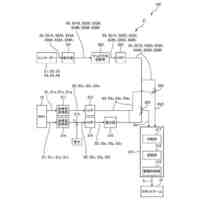
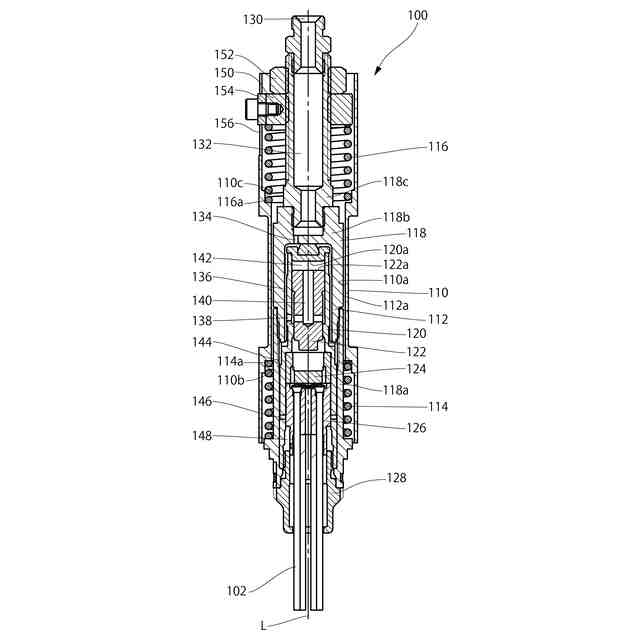
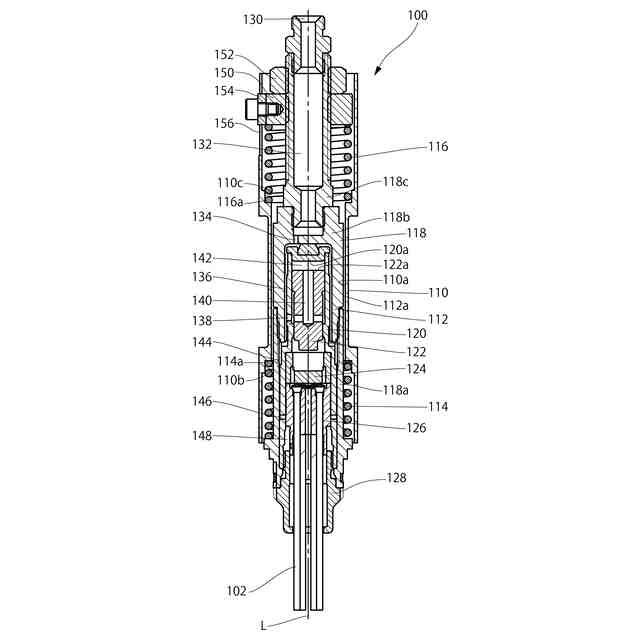
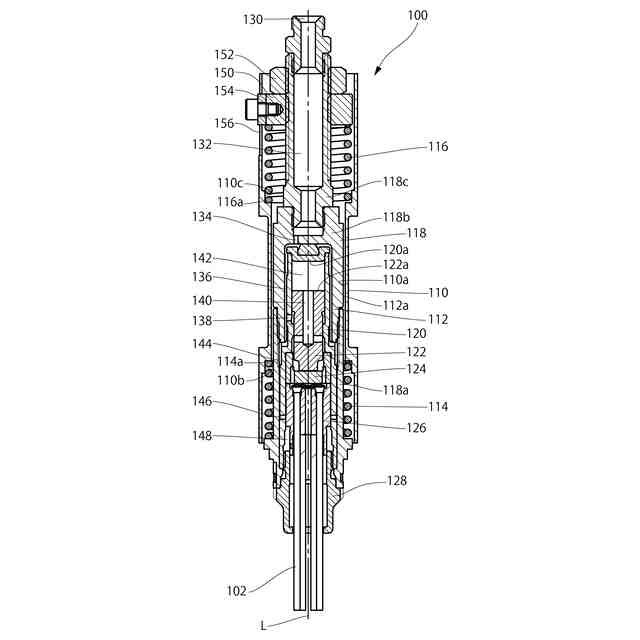
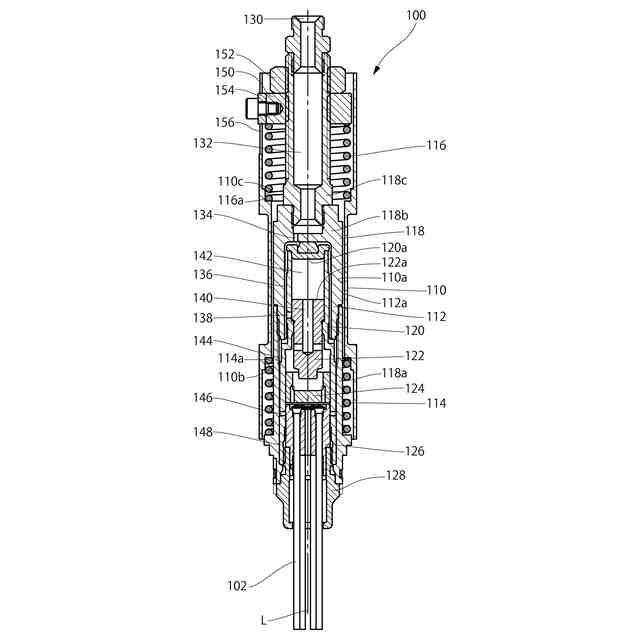
【解決手段】衝撃工具100は、筒状のハウジング110と、ハウジング110内に少なくとも部分的に配置された可動部112と、可動部112とハウジング110との間に配置された第1スプリング114及び第2スプリング116と、を備える。可動部112は、ニードル102を保持するニードルホルダ126と、ニードル102及びニードルホルダ126を往復動させるためのシリンダ120、ピストン122、及びアンビル124を備える。可動部112は、少なくとも打撃機構が駆動しておらず且つ可動部112に径方向での力が作用していない状態において可動部112の外周面112aとハウジング110の内周面110aとが直接接触しないようにして、第1及び第2スプリング114、116によって支持されている。
【選択図】図1
特許請求の範囲
【請求項1】
筒状のハウジングと、
前記ハウジング内に少なくとも部分的に位置し、前記ハウジングに対して前記ハウジングの長手軸線の方向に変位可能に配置された可動部であって、先端工具を保持する先端工具保持部、及び前記先端工具保持部に取り付けられた先端工具に対して前記ハウジングの長手軸線に沿った前後方向での打撃力を加える打撃機構を有する、可動部と、
前記可動部と前記ハウジングとの間に配置されて、前記可動部を前方側に付勢する第1スプリングと、
前記可動部と前記ハウジングとの間に配置されて、前記可動部を後方側に付勢する第2スプリングと、
を備え、
前記可動部は、少なくとも前記打撃機構が駆動しておらず且つ前記可動部に前記長手軸線に垂直な径方向での力が作用していない状態において前記可動部の外周面と前記ハウジングの内周面とが直接接触しないようにして、前記第1及び第2スプリングによって支持されている、衝撃工具。
続きを表示(約 670 文字)
【請求項2】
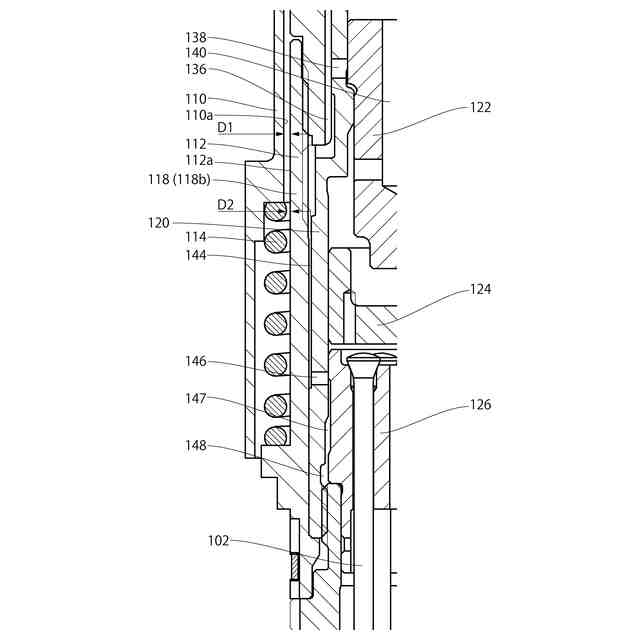
前記長手軸線に垂直な径方向で相互に隣接する位置での前記ハウジングの内径と前記可動部の外径との差が1mm以上である、請求項1に記載の衝撃工具。
【請求項3】
前記長手軸線に垂直な径方向で相互に隣接する位置での前記第1スプリングと前記第2スプリングとのうちの少なくとも一方の内径と前記可動部の外径との差が、前記長手軸線に垂直な径方向で相互に隣接する位置での前記ハウジングの内径と前記可動部の外径との差よりも小さくなるようにされた、請求項1又は2に記載の衝撃工具。
【請求項4】
前記打撃機構の駆動中に前記先端工具に一定以上の負荷が作用していないときには、前記可動部の外周面と前記ハウジングの内周面とが接触しないようにされた、請求項1に記載の衝撃工具。
【請求項5】
前記打撃機構の駆動中に前記先端工具に一定以上の負荷が作用したときに前記可動部の外周面が前記ハウジングの内周面に接触して、前記可動部の前記径方向への変位が制限されるようにされた、請求項4に記載の衝撃工具。
【請求項6】
前記可動部の外周面から径方向外側に突出した回転防止部材をさらに備え、前記回転防止部材が前記ハウジングに対して周方向で係合することにより、前記可動部が前記ハウジングに対して前記周方向に回転することが防止されるようにした、請求項1に記載の衝撃工具。
【請求項7】
前記第1スプリングと前記第2スプリングのばね定数が同じである、請求項1に記載の衝撃工具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、針タガネやチゼルなどの先端工具による振動を伴う打撃により被加工物の表面加工を行なうようにした衝撃工具に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
衝撃工具は、通常、シリンダ内に配置されたピストンを圧縮空気で往復動させ、そのピストンで針タガネやチゼルなどの先端工具又はそれらを保持する部材を打撃して、先端工具に打撃力を与えるようになっている。このような衝撃工具は、駆動中に、ピストンの往復動、ピストンによる打撃、先端工具が被加工物から受ける衝撃などによって、振動する。衝撃工具全体の振動が大きくなると、それを把持する作業者の作業性が低下したり、衝撃工具を保持する装置が損傷したりする虞がある。そのため、そのような外部に伝わる振動を低減するようにした衝撃工具が開発されている。例えば特許文献1及び2には、筒状のハウジング内にシリンダを前後方向に摺動可能に収容し、そのシリンダを2つのコイルスプリングで前後方向から支持するようにした構成が開示されている。ピストンの往復動に伴ってシリンダがその往復動方向(前後方向)に振動したときに2つのコイルスプリングによってその振動がある程度吸収されることにより、ハウジングに伝わる振動が低減されるようになっている。
【先行技術文献】
【特許文献】
【0003】
実公平2-7026号公報
米国特許第6192997号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
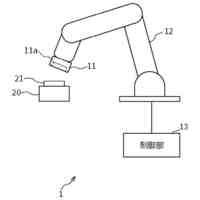
上述の従来の衝撃工具においては、シリンダの外周面とハウジングの内周面とが常に接触した状態でシリンダがハウジングに対して前後方向に摺動するようになっている。そのため、シリンダやピストンを含む打撃機構の振動は、スプリングによってある程度は低減されるものの、その一部はシリンダの外周面とハウジングの内周面との接触部分からハウジングに直接的に伝わることになる。特に衝撃工具をロボットアームに装着して使用する場合には、その振動によりロボットアームの動作に支障が出たり、ロボットアームが損傷したりする虞もある。そのため、ハウジングに伝わる振動を可能な限り低減させることが望ましい。
【0005】
そこで本発明は、打撃機構の振動がハウジングにより伝わりにくいようにした衝撃工具を提供することを目的とする。
【課題を解決するための手段】
【0006】
すなわち本発明は、
筒状のハウジングと、
前記ハウジング内に少なくとも部分的に位置し、前記ハウジングに対して前記ハウジングの長手軸線の方向に変位可能に配置された可動部であって、先端工具を保持する先端工具保持部、及び前記先端工具保持部に取り付けられた先端工具に対して前記ハウジングの長手軸線に沿った前後方向での打撃力を加える打撃機構を有する、可動部と、
前記可動部と前記ハウジングとの間に配置されて、前記可動部を前方側に付勢する第1スプリングと、
前記可動部と前記ハウジングとの間に配置されて、前記可動部を後方側に付勢する第2スプリングと、
を備え、
前記可動部は、少なくとも前記打撃機構が駆動しておらず且つ前記可動部に前記長手軸線に垂直な径方向での力が作用していない状態において前記可動部の外周面と前記ハウジングの内周面とが直接接触しないようにして、前記第1及び第2スプリングによって支持されている、衝撃工具を提供する。
【0007】
当該衝撃工具においては、少なくとも打撃機構が駆動しておらず且つ可動部に径方向での力が作用していない状態において可動部の外周面とハウジングの内周面とが直接接触しないようにして、可動部が第1及び第2スプリングによって支持されている。そのため、駆動状態においても、可動部とハウジングは接触しないか又は接触したとしても従来の常に接触して摺動するようにされたものに比べて接触圧の小さな一時的な接触とすることができるため、可動部からハウジングに伝わる振動を小さくすることが可能となる。
【0008】
また、前記長手軸線に垂直な径方向で相互に隣接する位置での前記ハウジングの内径と前記可動部の外径との差が1mm以上であるようにすることができる。
【0009】
上記差を1mm以上とすることにより、駆動状態における可動部とハウジングとの接触をより確実に無くすか又は少なくとも接触がより発生しにくくすることが可能となる。
【0010】
また、前記長手軸線に垂直な径方向で相互に隣接する位置での前記第1スプリングと前記第2スプリングとのうちの少なくとも一方の内径と前記可動部の外径との差が、前記長手軸線に垂直な径方向で相互に隣接する位置での前記ハウジングの内径と前記可動部の外径との差よりも小さくなるようにすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
26日前
国立大学法人金沢大学
ロボット
5日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
19日前
川崎重工業株式会社
ロボットアーム
1か月前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
株式会社ケー・エフ・シー
締結構造
9日前
川崎重工業株式会社
ロボットリスト
1か月前
日本信号株式会社
作業機制御システム
19日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社京阪エンジニアリング
脱着装置
20日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社マキタ
集塵アタッチメント
19日前
アピュアン株式会社
衝撃工具
今日
株式会社スター精機
ワーク搬送装置
23日前
トヨタ自動車株式会社
把持装置、把持方法
13日前
トヨタ自動車株式会社
制御装置及び制御方法
1か月前
モトコマ株式会社
寄せポンチホルダー
1か月前
川崎重工業株式会社
ロボットシステム
26日前
株式会社コスメック
把持装置
6日前
株式会社DailyColor
ロボットハンド
1か月前
個人
ターンバックル用工具
1か月前
株式会社ダイヘン
ロボット制御システム
9日前
国立大学法人 東京大学
ロボットアーム
6日前
有限会社松尾エンジニアリング
連結部材
1か月前
原利興工業有限公司
工具用スリーブ
5日前
株式会社SHIN‐JIGEN
上肢アシスト装置
1か月前
株式会社不二越
ロボットビジョンシステム
12日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
26日前
株式会社マキタ
作業機
5日前
株式会社マキタ
作業機
5日前
株式会社マキタ
作業機
5日前
川崎重工業株式会社
多関節ロボット
19日前
セイコーエプソン株式会社
ロボットシステム
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ