TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025015083
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023118200
出願日
2023-07-20
発明の名称
ターンバックル用工具
出願人
個人
代理人
個人
,
個人
,
個人
,
個人
主分類
B25B
21/00 20060101AFI20250123BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ターンバックル胴に対して直接に着脱可能なターンバックル用工具であって、小型軽量かつ安価なターンバックル用工具を提供する。
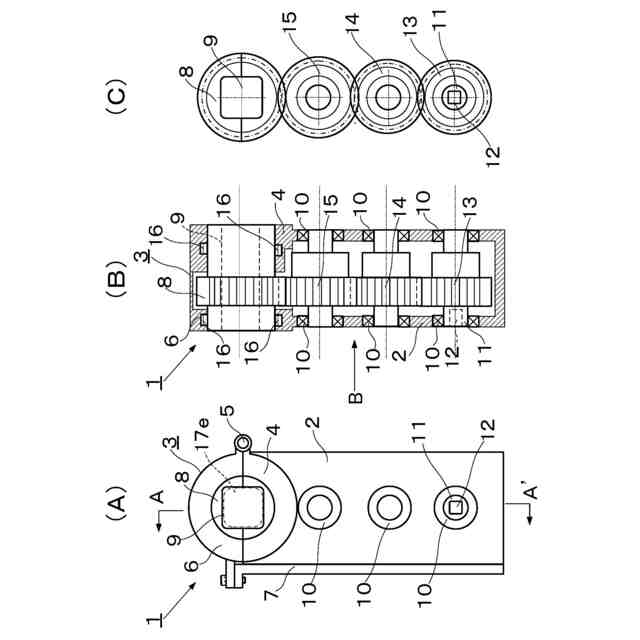
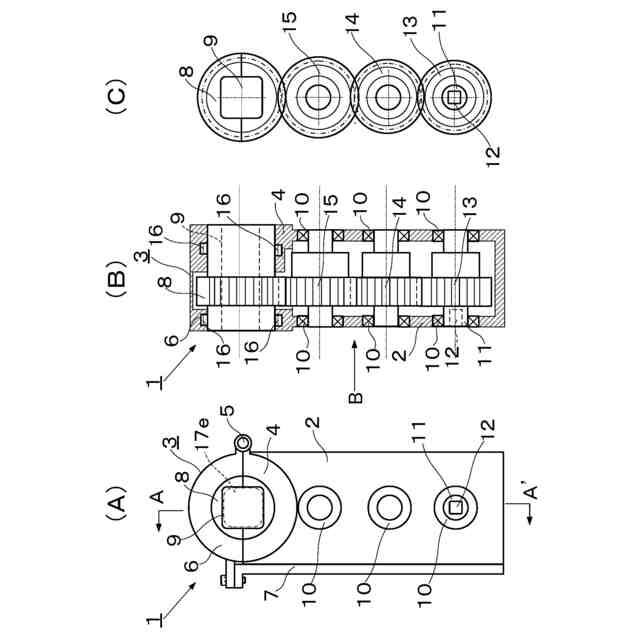
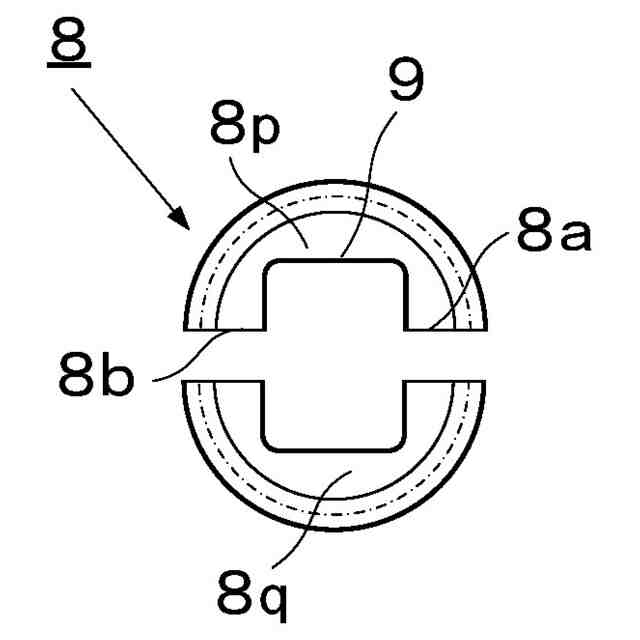
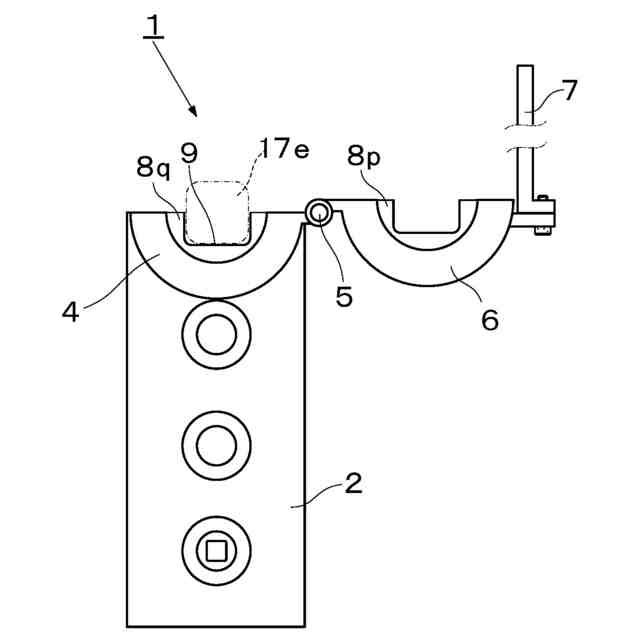
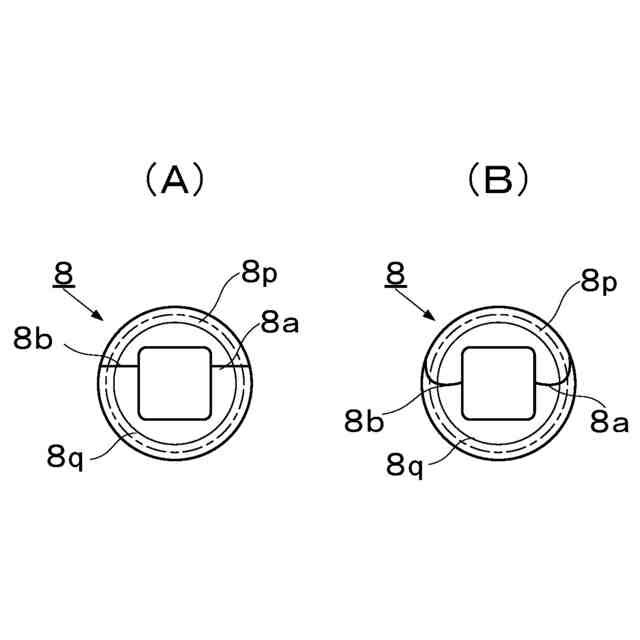
【解決手段】ターンバックル用工具1は、本体ケース2と、ターンバックル胴が篏合される貫通孔9を回転中心に備える出力平歯車8と、出力平歯車8を当該出力平歯車8の回転中心周りに回転自在に支持する回転支持部材3と、電動回転工具の出力軸に物理的に連結されるとともに、本体ケース2に回転自在に支持される入力軸11と、入力軸11と出力平歯車8の間にあって、トルクを伝達するトルク伝達機構とを備え、出力平歯車8は、貫通孔9から出力平歯車8の外縁に至る分割線でもって2個の部材に分割可能に構成され、回転支持部材3は、本体ケース2に固定される第1部材4と、第1部材4に対して分離結合自在に構成された第2部材6とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
本体ケースと、
ターンバックル胴が篏合される貫通孔を回転中心に備える出力歯車と、
前記出力歯車を当該出力歯車の回転中心周りに回転自在に支持する回転支持部材と、
駆動源の出力軸に物理的に連結されるとともに、前記本体ケースに回転自在に支持される入力軸と、
前記入力軸と前記出力歯車の間にあって、トルクを伝達するトルク伝達機構と、を備えるとともに、
前記出力歯車は、前記貫通孔から前記出力歯車の外縁に至る分割線でもって2個の部材に分割可能に構成され、
前記回転支持部材は、前記本体ケースに固定される第1部材と、前記第1部材に対して分離結合自在に構成された第2部材とを備える、
ターンバックル用工具。
続きを表示(約 370 文字)
【請求項2】
前記第2部材は、前記出力歯車の回転軸に平行なヒンジ軸周りに揺動自在に、前記第1部材に支持される、
請求項1に記載のターンバックル用工具。
【請求項3】
前記出力歯車は、磁性材料で構成されるとともに、
前記第1部材及び前記第2部材の前記出力歯車と対面する部位に永久磁石が固定されている、
請求項1又は請求項2に記載のターンバックル用工具。
【請求項4】
前記トルク伝達機構に、前記入力軸に固定されて、前記入力軸とともに回転する入力平歯車を備える、
請求項1又は請求項2に記載のターンバックル用工具。
【請求項5】
前記入力平歯車と前記出力歯車の間に、単数個又は複数個の中間平歯車を備える、
請求項4に記載のターンバックル用工具。
発明の詳細な説明
【技術分野】
【0001】
この発明は、ターンバックル胴を回転させるターンバックル用工具に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
木造家屋の床下に配置されて、床面の荷重を土台に伝える束体と呼ばれる建築金物がある。この束体にターンバックルを備えて、高さを自在に調整できるようにした物が知られている。例えば、特許文献1に記載の束体は、土間又は束石・コンクリート基盤などの据付面に固定される台座と、建物の大引きの下面に固定される受座との間にターンバックル部を備えて、受座の高さを自在に調整可能に構成されている。
【0003】
特許文献1に記載の束体の高さ調整は、束体を床下に置いた後で行う必要がある。そのため、作業者は床下の狭い空間に入って、不自然な姿勢でレンチを使ってターンバックル胴を回動させる必要がある。不自然な姿勢でレンチを操作するのは、作業者の肉体的負担が大きいので、作業者の腕力に依らないで、ターンバックル胴を回動させて、束体の高さを調整ができるターンバックル用工具が求められている。
【0004】
もっとも、束体の高さ調整以外の分野においては、作業者の腕力に依らないで、ターンバックル胴を回動させることができるターンバックル用工具は、既に知られている。例えば、特許文献2には、鉄骨構造に使用される線状のブレース鋼の張力調整に使用されるターンバックル胴を回動させるターンバックル用工具が開示されている。特許文献2に記載のターンバックル用工具は、電動回転工具の出力軸に篏合される入力軸と、入力軸に固定されたウォームギアと、ウォームギアと噛合するウォームホィールとを備えている。そして、ウォームホィールは中心孔と連続して1つの空間を形成する開口を備えている。また、中心孔はターンバックル胴を篏合させることができる形状と寸法を有している。このように構成されているので、特許文献2に記載のターンバックル用工具によれば、ターンバックル胴を中心孔に篏合させて、電動回転工具の動力でもって、ターンバックル胴を回動させることができる。
【0005】
また、特許文献3には、ターンバックル胴に相当する締付部品が挿入可能な開口を有する第1のソケット部材と、その第1のソケット部材の開口を開閉する第2のソケット部材が、ハウジングに回転可能に支持されて構成される締付工具が開示されている。該締付工具は、第1のソケット部材の開口を閉じた状態で第2のソケット部材を第1のソケット部材に固定する固定手段を備えていて、第1及び第2のソケット部材の外周には、平歯車の歯に相当する係合部が設けられている。
【先行技術文献】
【特許文献】
【0006】
特開2005-163319号公報
特許第7165364号公報
特開2002-36133号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献2に記載のターンバックル用工具は、径が比較的小さいブレース鋼を、開口を通して中心孔に導いて、その後に、ウォームホィールをターンバックル胴に向けて移動させて、ターンバックル胴を中心孔に篏合させている。
【0008】
さて、特許文献1に記載の束体においては、ターンバックル部3がターンバックル胴に相当し、ボルト15がブレース鋼に相当する(図2)。また、ターンバックル部3の工具把持部33の断面形は工具把持部33の他の部分よりも小さい(図3,4)。つまり、特許文献1に記載の束体には、ボルト15と工具把持部33の間に断面形が工具把持部33より大きい部分がある。そのため、特許文献1に記載の束体の高さ調整に特許文献2に記載のターンバックル用工具を使用する場合に、束体のボルト15をターンバックル用工具のウォームホィールの開口を通して中心孔に導いて、その後に束体の工具把持部33をターンバックル用工具の中心孔に篏合させることができない。特許文献1に記載の束体の高さ調整に特許文献2に記載のターンバックル用工具を使用する場合には、開口の幅を拡大して、工具把持部33を、開口を通して中心孔に導けるようにする必要がある。
【0009】
しかしながら、開口の幅をウォームホィールの径に対して相対的に大きくすると、開口がウォームギアに正対する場合に、ウォームホィールの歯とウォームギアの噛み合いが浅くなって、十分なトルクの伝達ができなくなる。そのため、開口の幅を拡大する場合には、ウォームホィールの径を拡大して、開口の幅がウォームホィールの径に対して相対的に大きくならないようにする必要がある。その結果、ターンバックル用工具全体の寸法と重量が大きくなるので、使い勝手が悪くなる。このように、特許文献2に記載のターンバックル用工具を特許文献1に記載の束体の高さ調整に使用する場合には、ターンバックル用工具の寸法と重量が大きくなって、使い勝手が悪くなると言う問題がある。
【0010】
特許文献3に記載の締付工具においては、締付工具をターンバックル胴に取り付ける際に、まず固定ボルト34を緩めて、固定側ソケット支持アーム29と回転側ソケット支持アーム44との連結を解除して、回転側ソケット支持アーム44をピン46周りに回動させる必要がある(図1,7)。そして、固定ボルト89を緩めて、第2ソケット84の第1ソケット82に対する固定を解除し、第2ソケット84をピン93周りに回動させる必要がある(図3,4)。第1ソケット82の開口にターンバックルW(ターンバックル胴)に挿入した後で、上記の手順を逆に辿って、第2ソケット84を第1ソケット82に対して固定し、固定側ソケット支持アーム29と回転側ソケット支持アーム44とを連結する必要がある。このように、特許文献3に記載の締付工具には、操作が複雑で手間が掛かると言う問題がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
17日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
3か月前
株式会社マキタ
電動工具
10日前
株式会社マキタ
電動工具
25日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社マキタ
ハンマドリル
2か月前
株式会社ケー・エフ・シー
締結構造
今日
川崎重工業株式会社
ロボットリスト
25日前
川崎重工業株式会社
ロボットアーム
25日前
日本車輌製造株式会社
締め付け工具
25日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
4か月前
川崎重工業株式会社
ロボットアーム
25日前
日本信号株式会社
作業機制御システム
10日前
川崎重工業株式会社
ロボットシステム
25日前
学校法人立命館
ロボットハンド
3か月前
CKD株式会社
吸着型搬送装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社アイエイアイ
グリッパー
3か月前
株式会社京阪エンジニアリング
脱着装置
11日前
株式会社スター精機
ワーク搬送装置
14日前
株式会社アマダ
磁気吸着装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
トヨタ自動車株式会社
把持装置、把持方法
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































