TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025005620
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023105856
出願日
2023-06-28
発明の名称
磁気吸着装置
出願人
株式会社アマダ
代理人
個人
,
個人
,
個人
主分類
B25J
15/06 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークに穴が開いている場合やワークがシリンダチューブの底面よりも小さい場合でも、ワークの有無を検出することのできる磁気吸着装置を提供する。
【解決手段】磁気吸着装置1は、底面がワークを吸着する吸着面3であり、内部に圧力室5を備えたシリンダチューブ7と、永久磁石9を備えて圧力室5内を上下に移動するピストン11と、ワークWを吸着するときに、ピストン11を圧力室5の下端へ移動させて永久磁石9の磁力でワークWを吸着面3に吸着させる制御部13と、ピストン11の位置を検出する磁気センサ15とを備え、制御部13は、ピストン11を圧力室5の下端へ移動させた後に、ワークWが吸着面3に吸着していない場合に、ピストン11を上方へ移動させ、ピストン11が上方へ移動したことを磁気センサ15が検出したか否かによって、ワークWが吸着面3に吸着しているか否かを判定する。
【選択図】図2
特許請求の範囲
【請求項1】
底面がワークを吸着する吸着面であり、内部に圧力室を備えたシリンダチューブと、
永久磁石を備えて前記圧力室内を上下に移動するピストンと、
前記ワークを吸着するときに、前記ピストンを前記圧力室の下端へ移動させて前記永久磁石の磁力で前記ワークを前記吸着面に吸着させる制御部と、
前記ピストンの位置を検出するセンサと、を備え、
前記制御部は、前記ピストンを前記圧力室の下端へ移動させた後に、前記ワークが前記吸着面に吸着していない場合に、前記ピストンを上方へ移動させ、前記ピストンが上方へ移動したことを前記センサが検出したか否かによって、前記ワークが前記吸着面に吸着しているか否かを判定する
磁気吸着装置。
続きを表示(約 690 文字)
【請求項2】
前記ピストンは、前記圧力室を上部空間と下部空間とに隔て、
前記制御部は、前記ピストンを前記圧力室の下端へ移動させた後に、所定の判定圧力のエアを前記下部空間へ供給し、前記ワークが前記吸着面に吸着していない場合に、前記ピストンを上方へ移動させ、
前記判定圧力は、前記ワークと吸着している前記ピストンを前記ワークから引き離す圧力よりも小さく、前記ワークと吸着していない前記ピストンを上方へ移動させる最低上昇圧力よりも大きく設定されている
請求項1に記載の磁気吸着装置。
【請求項3】
前記ワークと吸着していない前記ピストンを上方へ移動させる弾性力を有する弾性部材をさらに備え、
前記弾性力は、前記ワークと吸着している前記ピストンを前記ワークから引き離す力よりも小さく設定され、
前記制御部は、前記ピストンを前記圧力室の下端へ移動させた後に、前記ワークが前記吸着面に吸着していない場合に、前記弾性部材は、前記弾性力によって前記ピストンを上方へ移動させる
請求項1に記載の磁気吸着装置。
【請求項4】
前記制御部は、前記ピストンを前記圧力室の下端へ移動させた後に、前記ピストンが上方へ移動しない場合には前記ワークが前記吸着面に吸着していると判定し、前記ピストンが上方へ移動した場合には前記ワークが前記吸着面に吸着していないと判定する
請求項1~3のいずれか1項に記載の磁気吸着装置。
【請求項5】
請求項1~3のいずれか1項に記載の磁気吸着装置を備えた搬出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、磁気吸着装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、永久磁石の力でワークを吸引保持するマグネットチャックが記載されている。特許文献1のマグネットチャックでは、ピストンが下死点にあるときに、シリンダチューブの下端の吸着面でワークを吸着する。吸着されたワークは、シリンダチューブの側面に設けられた光電センサや近接センサで検出されていた。
【先行技術文献】
【特許文献】
【0003】
特開2022-41872号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来のマグネットチャックでは、シリンダチューブの側面に光電センサを設けていたので、センサ直下の光が当たる部分のワークに穴が開いている場合には、光が反射されずにワークの有無を検出することができないという問題点があった。また、ワークがシリンダチューブの底面よりも小さい場合や光電センサの代わりに近接センサを設けた場合も同様の問題点があった。
【課題を解決するための手段】
【0005】
本発明の一態様は、底面がワークを吸着する吸着面であり、内部に圧力室を備えたシリンダチューブと、永久磁石を備えて前記圧力室内を上下に移動するピストンと、前記ワークを吸着するときに、前記ピストンを前記圧力室の下端へ移動させて前記永久磁石の磁力で前記ワークを前記吸着面に吸着させる制御部と、前記ピストンの位置を検出するセンサと、を備え、前記制御部は、前記ピストンを前記圧力室の下端へ移動させた後に、前記ワークが前記吸着面に吸着していない場合に、前記ピストンを上方へ移動させ、前記ピストンが上方へ移動したことを前記センサが検出したか否かによって、前記ワークが前記吸着面に吸着しているか否かを判定する磁気吸着装置である。
【0006】
本発明の一態様に係る磁気吸着装置によれば、ピストンが上方へ移動したことをセンサが検出したか否かによって、ワークが吸着面に吸着しているか否かを判定する。したがって、ワークに穴が開いている場合やワークがシリンダチューブの底面より小さい場合でも、ワークの有無を検出することができる。
【発明の効果】
【0007】
本発明の一態様によれば、ワークに穴が開いている場合やワークがシリンダチューブの底面よりも小さい場合でも、ワークの有無を検出することができる。
【図面の簡単な説明】
【0008】
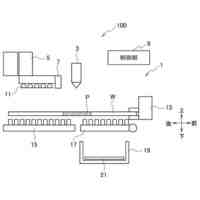
図1は、第1実施形態に係る磁気吸着装置の構造を示す斜視図である。
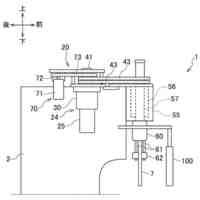
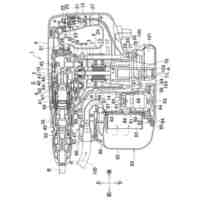
図2は、第1実施形態に係る磁気吸着装置の構造を示す断面図である。
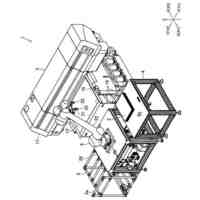
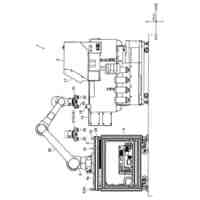
図3Aは、第1実施形態に係る磁気吸着装置を備えた搬出装置の構造を示す斜視図である。
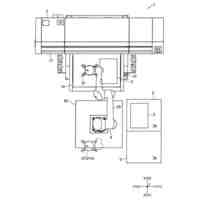
図3Bは、第1実施形態に係る磁気吸着装置を備えた搬出装置の底面の構造を示す平面図である。
図4は、第1実施形態に係る磁気吸着装置を備えた搬出装置によるワーク搬出処理の処理手順を示すフローチャートである。
図5は、第1実施形態に係る磁気吸着装置におけるピストンが下降する動作を説明するための図である。
図6は、第1実施形態に係る磁気吸着装置におけるワーク吸着時の動作を説明するための図である。
図7は、第1実施形態に係る磁気吸着装置におけるピストンが上昇する動作を説明するための図である。
図8は、第1実施形態に係る磁気吸着装置におけるワーク集積時の動作を説明するための図である。
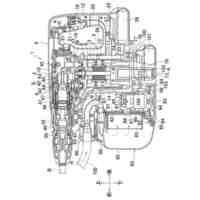
図9は、第2実施形態に係る磁気吸着装置の構造を示す断面図である。
【発明を実施するための形態】
【0009】
[第1実施形態]
[磁気吸着装置]
以下、図面を参照し、本実施形態に係る磁気吸着装置について説明する。図1は、磁気吸着装置の構造を示す斜視図であり、図2は断面図である。図1、2に示すように、本実施形態に係る磁気吸着装置1は、底面がワークWを吸着する吸着面3であり、内部に圧力室5を備えたシリンダチューブ7と、永久磁石9を備えて圧力室5内を上下に移動するピストン11と、ワークWを吸着するときに、ピストン11を圧力室5の下端へ移動させて永久磁石9の磁力でワークWを吸着面3に吸着させる制御部13と、ピストン11の位置を検出する磁気センサ15と、を備える。制御部13は、ピストン11を圧力室5の下端へ移動させた後に、ワークWが吸着面3に吸着していない場合に、ピストン11を上方へ移動させ、ピストン11が上方へ移動したことを磁気センサ15が検出したか否かによって、ワークWが吸着面3に吸着しているか否かを判定する。
【0010】
シリンダチューブ7は、アルミニウム合金等の常磁性体金属からなり、図1に示すように直方体の形状をしている。また、図2に示すように、シリンダチューブ7の底面はワークWを吸着する吸着面3となっており、内部には圧力室5を備えている。圧力室5は、円筒状の形状をしており、内部に設けられたピストン11によって、上部空間17と下部空間19に隔てられている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社アマダ
レーザ加工システム
14日前
株式会社アマダ
板金加工方法及び板金加工用金型
6日前
株式会社アマダ
曲げ加工機、及び曲げ加工機のテーブル制御方法
28日前
個人
腰袋
6日前
株式会社マキタ
電動工具
14日前
川崎重工業株式会社
ロボットリスト
14日前
川崎重工業株式会社
ロボットアーム
14日前
川崎重工業株式会社
ロボットアーム
14日前
川崎重工業株式会社
ロボット
2か月前
日本車輌製造株式会社
締め付け工具
14日前
川崎重工業株式会社
ロボットシステム
14日前
CKD株式会社
吸着型搬送装置
28日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
ジヤトコ株式会社
圧入装置
27日前
株式会社京阪エンジニアリング
脱着装置
今日
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
3日前
川崎重工業株式会社
ロボットシステム
6日前
トヨタ自動車株式会社
制御装置及び制御方法
14日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
15日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社DailyColor
ロボットハンド
15日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
個人
ターンバックル用工具
21日前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
有限会社松尾エンジニアリング
連結部材
15日前
株式会社SHIN‐JIGEN
上肢アシスト装置
20日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ