TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001071
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100426
出願日
2023-06-20
発明の名称
印刷システム
出願人
株式会社ミマキエンジニアリング
代理人
個人
主分類
B25J
19/06 20060101AFI20241225BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】媒体に印刷を行う印刷装置と媒体を搬送する搬送ロボットとを備える印刷システムにおいて、印刷装置でエラーが発生したときの搬送ロボットの具体的な動作を提案する。
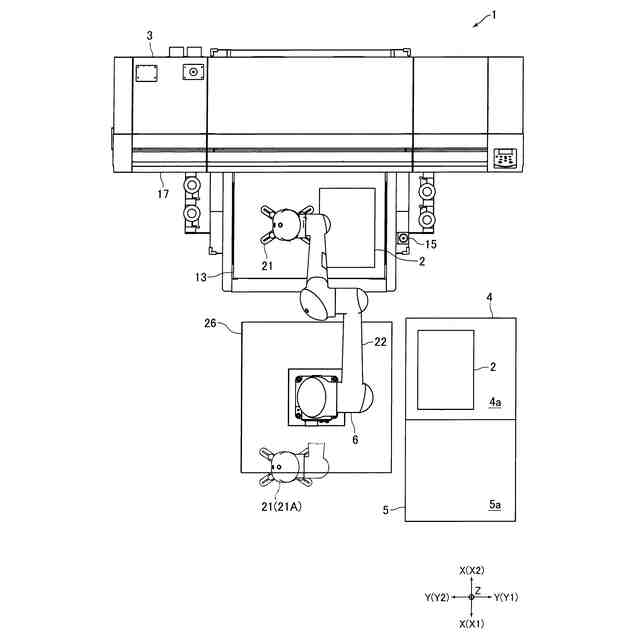
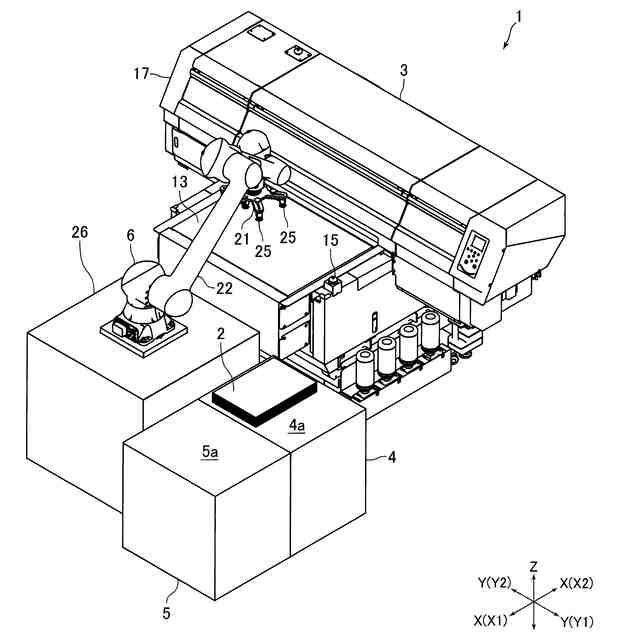
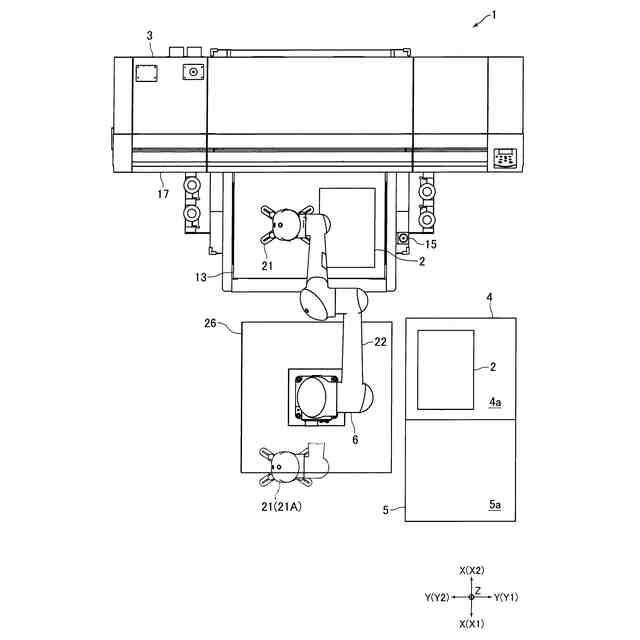
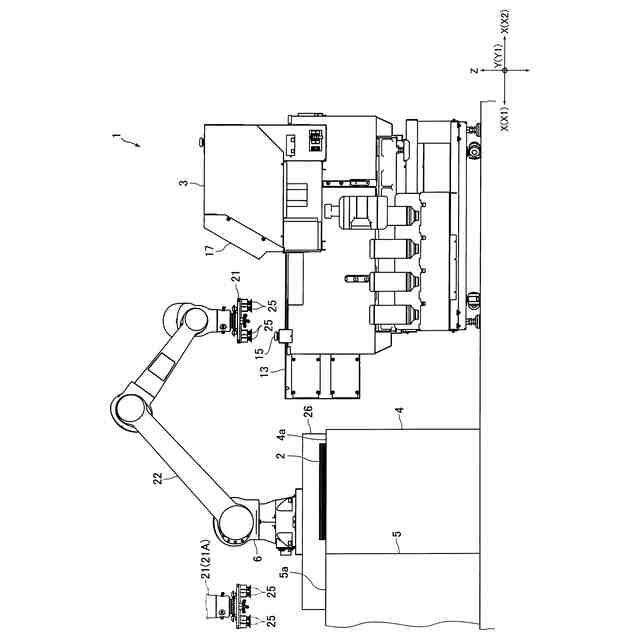
【解決手段】印刷システム1は、媒体2に印刷を行う印刷装置3と、印刷装置3への媒体2の搬入と印刷装置3からの媒体2の搬出との少なくともいずれか一方を行う搬送ロボット6とを備え、搬送ロボット6は、媒体2を保持するハンド21を備えている。印刷システム1では、印刷装置3でエラーが発生したときにハンド21が留まることを禁止する領域である禁止領域が予め設定されており、印刷装置3でエラーが発生したときに、ハンド21が禁止領域内に配置されていると、ハンド21は、禁止領域外の所定の位置である安全停止位置21Aまで移動してから停止する。
【選択図】図2
特許請求の範囲
【請求項1】
媒体に印刷を行う印刷装置と、前記印刷装置への前記媒体の搬入と前記印刷装置からの前記媒体の搬出との少なくともいずれか一方を行う搬送ロボットとを備え、
前記搬送ロボットは、前記媒体を保持するハンドを備え、
前記印刷装置でエラーが発生したときに前記ハンドが留まることを禁止する領域である禁止領域が予め設定され、
前記印刷装置でエラーが発生したときに、前記ハンドが前記禁止領域内に配置されていると、前記ハンドは、前記禁止領域外の所定の位置である安全停止位置まで移動してから停止することを特徴とする印刷システム。
続きを表示(約 1,100 文字)
【請求項2】
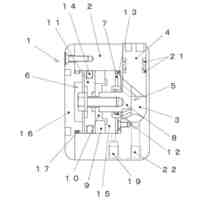
前記印刷装置は、インクを吐出するインクジェットヘッドと、前記インクジェットヘッドが搭載されるキャリッジと、前記キャリッジを主走査方向に移動させるキャリッジ駆動機構と、前記媒体が載置されるテーブルと、上下方向と主走査方向とに直交する副走査方向に前記テーブルを移動させるテーブル駆動機構とを備え、
前記禁止領域には、副走査方向における前記テーブルの動作領域が含まれていることを特徴とする請求項1記載の印刷システム。
【請求項3】
前記印刷装置は、インクを吐出するインクジェットヘッドと、前記インクジェットヘッドが搭載されるキャリッジと、主走査方向への移動が可能となるように前記キャリッジを保持するYバーと、前記キャリッジを主走査方向に移動させるキャリッジ駆動機構と、前記媒体が載置されるテーブルと、上下方向と主走査方向とに直交する副走査方向に前記Yバーを移動させるYバー駆動機構とを備え、
前記禁止領域には、副走査方向における前記Yバーの動作領域が含まれていることを特徴とする請求項1記載の印刷システム。
【請求項4】
前記禁止領域には、前記印刷装置の保守作業を行うための領域である保守作業領域が含まれていることを特徴とする請求項1から3のいずれかに記載の印刷システム。
【請求項5】
前記印刷装置でエラーが発生したときに、前記ハンドが前記禁止領域外に配置されていると、前記ハンドは、前記安全停止位置まで移動して停止することを特徴とする請求項1から3のいずれかに記載の印刷システム。
【請求項6】
前記印刷装置でエラーが発生したときに、前記ハンドが前記禁止領域外に配置されていると、前記ハンドは、前記印刷装置でエラーが発生した時点において配置されていた位置で停止することを特徴とする請求項1から3のいずれかに記載の印刷システム。
【請求項7】
前記印刷装置は、前記媒体が載置されるテーブルを備え、
前記安全停止位置は、前記テーブルの上面よりも高い位置であることを特徴とする請求項1から3のいずれかに記載の印刷システム。
【請求項8】
前記印刷装置は、前記印刷装置を緊急停止させるための緊急停止ボタンを備え、
前記安全停止位置は、前記緊急停止ボタンの上端よりも高い位置であることを特徴とする請求項1から3のいずれかに記載の印刷システム。
【請求項9】
上下方向から見たときに、前記安全停止位置は、前記印刷装置とは異なる位置であることを特徴とする請求項1から3のいずれかに記載の印刷システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、媒体に印刷を行う印刷装置と媒体を搬送する搬送ロボットとを備える印刷システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、半導体基板に対して印刷を行う印刷システムが知られている(たとえば、特許文献1参照)。特許文献1に記載の印刷システムは、半導体基板に液滴を吐出して印刷を行うインクジェットプリンタ(塗布部)と、印刷システムにおいて半導体基板を搬送する搬送ロボット(搬送部)とを備えている。搬送ロボットは、スカラー型のロボットであり、2個の腕部からアームと、アームの先端側に取り付けられるハンド(把持部)とを備えている。搬送ロボットは、インクジェットプリンタへの半導体基板の搬入やインクジェットプリンタからの半導体基板の搬出等を行う。
【先行技術文献】
【特許文献】
【0003】
特開2012-183595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の印刷システムでは、インクジェットプリンタでエラーが発生したときの搬送ロボットの具体的な動作は提案されていない。
【0005】
そこで、本発明の課題は、媒体に印刷を行う印刷装置と媒体を搬送する搬送ロボットとを備える印刷システムにおいて、印刷装置でエラーが発生したときの搬送ロボットの具体的な動作を提案することにある。
【課題を解決するための手段】
【0006】
上記の課題を解決するため、本発明の印刷システムは、媒体に印刷を行う印刷装置と、印刷装置への媒体の搬入と印刷装置からの媒体の搬出との少なくともいずれか一方を行う搬送ロボットとを備え、搬送ロボットは、媒体を保持するハンドを備え、印刷装置でエラーが発生したときにハンドが留まることを禁止する領域である禁止領域が予め設定され、印刷装置でエラーが発生したときに、ハンドが禁止領域内に配置されていると、ハンドは、禁止領域外の所定の位置である安全停止位置まで移動してから停止することを特徴とする。
【0007】
本発明の印刷システムでは、印刷装置でエラーが発生したときに、ハンドが禁止領域内に配置されていると、ハンドは、禁止領域外の所定の位置である安全停止位置まで移動してから停止する。そのため、本発明では、印刷装置の動作や印刷装置の保守作業に支障が生じにくいハンドの位置を安全停止位置とすることで、印刷装置でエラーが発生したときに、禁止領域内に配置されているハンドを、印刷装置の動作や印刷装置の保守作業に支障が生じにくい位置まで移動させて停止させることが可能になる。したがって、本発明では、印刷装置でエラーが発生した後の印刷装置の復旧作業をオペレータが容易に行うことが可能になる。
【0008】
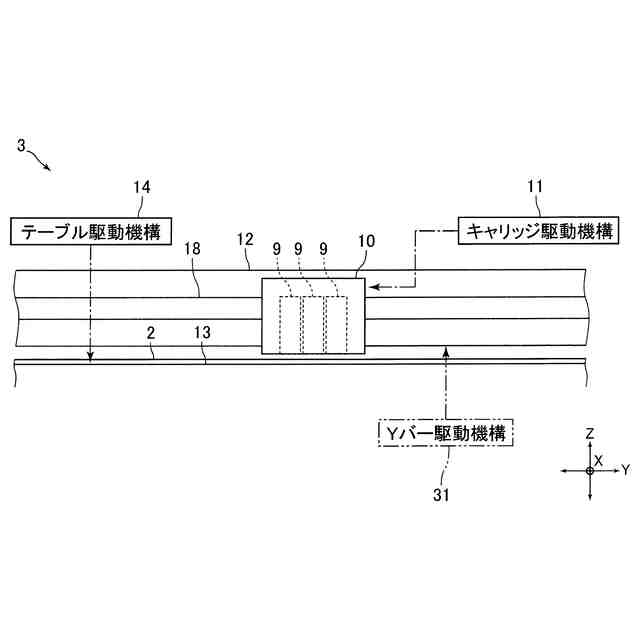
本発明において、たとえば、印刷装置は、インクを吐出するインクジェットヘッドと、インクジェットヘッドが搭載されるキャリッジと、キャリッジを主走査方向に移動させるキャリッジ駆動機構と、媒体が載置されるテーブルと、上下方向と主走査方向とに直交する副走査方向にテーブルを移動させるテーブル駆動機構とを備え、禁止領域には、副走査方向におけるテーブルの動作領域が含まれている。この場合には、安全停止位置に配置されるハンドが副走査方向におけるテーブルの動作領域の外に配置されているため、印刷装置でエラーが発生した後のテーブル周辺の復旧作業をオペレータが容易に行うことが可能になる。
【0009】
本発明において、たとえば、印刷装置は、インクを吐出するインクジェットヘッドと、インクジェットヘッドが搭載されるキャリッジと、主走査方向への移動が可能となるようにキャリッジを保持するYバーと、キャリッジを主走査方向に移動させるキャリッジ駆動機構と、媒体が載置されるテーブルと、上下方向と主走査方向とに直交する副走査方向にYバーを移動させるYバー駆動機構とを備え、禁止領域には、副走査方向におけるYバーの動作領域が含まれている。この場合には、安全停止位置に配置されるハンドが副走査方向におけるYバーの動作領域の外に配置されているため、印刷装置でエラーが発生した後のYバー周辺の復旧作業をオペレータが容易に行うことが可能になる。
【0010】
本発明において、たとえば、禁止領域には、印刷装置の保守作業を行うための領域である保守作業領域が含まれている。この場合には、安全停止位置に配置されるハンドが保守作業領域の外に配置されているため、印刷装置でエラーが発生した後の復旧作業をオペレータが容易に行うことが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
9日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動工具
17日前
株式会社マキタ
電動工具
2日前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社マキタ
電動ハンマ
4か月前
株式会社エビス
携帯付属物取付具
3か月前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットリスト
17日前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボットアーム
17日前
川崎重工業株式会社
ロボットアーム
17日前
日本車輌製造株式会社
締め付け工具
17日前
SMC株式会社
グリッパ
4か月前
川崎重工業株式会社
ロボット
2か月前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
ロボットシステム
17日前
CKD株式会社
吸着型搬送装置
1か月前
株式会社近藤製作所
産業用ロボットチャック
4か月前
日本信号株式会社
作業機制御システム
2日前
株式会社京阪エンジニアリング
脱着装置
3日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社アイエイアイ
グリッパー
2か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ