TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024151554
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023064995
出願日
2023-04-12
発明の名称
産業用ロボットチャック
出願人
株式会社近藤製作所
代理人
主分類
B25J
15/08 20060101AFI20241018BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】生産コストを低減しつつ、小型の防塵防水対策を行った産業用ロボットチャックを提供する。
【解決手段】楕円形状をした配設孔と楕円形状をしたマスタージョウにすることにより、マスタージョウの回転抑制を行う部材を減らすことで、部品点数の削減による生産コスト低減を行い、マスタージョウに形成した複数のパッキン溝に当接したリップパッキンであるシール部材により外部からの粉塵や切削水などの異物の流入を防ぎつつ、内部で生じた摩耗粉などの異物は外部に排出することができ、マスタージョウ全体で回転抑制のガイドをすることができることにより、従来のシール部材がある部分とガイド部分とを別々に配設しているものより、小型化することができ、外観の凹凸を少なくすることで外観に異物が付きにくい流線型にすることができる。
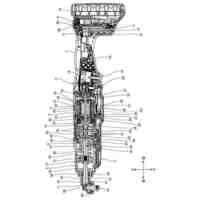
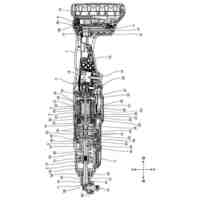
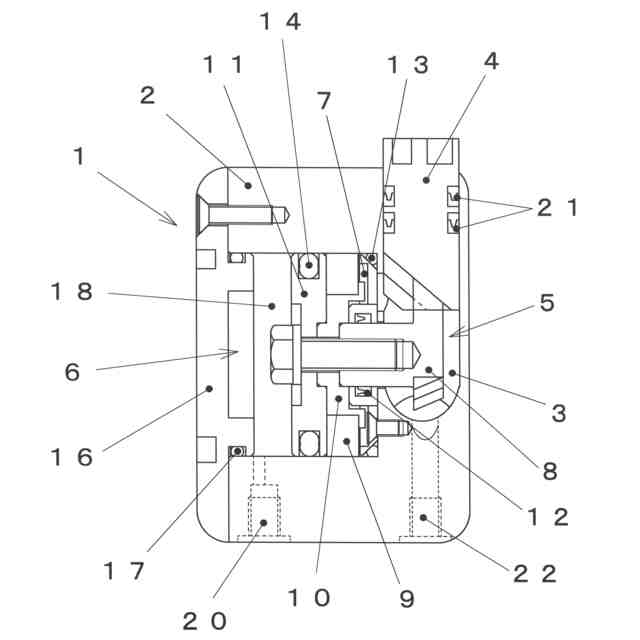
【選択図】図5
特許請求の範囲
【請求項1】
ボディ中心に対し放射線状に配設された複数の配設孔と、前記配設孔内を往復運動可能に収容されたマスタージョウと、複数の前記マスタージョウを連結して同期動作を行わせるピストンと、前記ピストンを往復運動可能に収容するシリンダを備えたハンドチャックにおいて、楕円形状をした前記配設孔と、楕円形状をした前記マスタージョウと、前記マスタージョウに形成したパッキン溝と、前記パッキン溝に当接したシール部材と、前記ボディに配設した排気用ポートを備えることを特徴とする産業用ロボットチャック。
続きを表示(約 220 文字)
【請求項2】
前記パッキン溝が複数形成されていることを特徴とする請求項1に記載の産業用ロボットチャック。
【請求項3】
前記シール部材がリップパッキンであることを特徴とする請求項1又は請求項2に記載の産業用ロボットチャック。
【請求項4】
前記シリンダ内に形成され、前記配設孔と前記シリンダ間に介在するカバー部を備えることを特徴とする請求項1から3のいずれか一項に記載の産業用ロボットチャック。
発明の詳細な説明
【技術分野】
【0001】
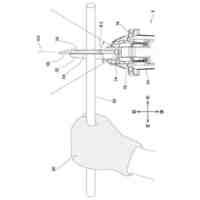
本発明は、各種産業用ロボット及び搬送装置に装着し、被把持体を把持搬送する為の防塵防水対策を行った産業用ロボットチャックに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来では、各種産業用ロボット及び搬送装置などに装着され被把持物の把持搬送に使用される産業用ロボットチャックには、エアチャックなどが利用されており、様々な環境下で使用されるものであって、粉塵が発生する環境や、水などの液体を使用する環境などでは、ロボットチャック内部に異物が流入し、動作の妨げになるなどの問題がある。
【0003】
上記の問題を解決する方法として、特許文献1に記載されているのは、チャックボディ内に可動部を配設し、シリンダの作用下に可動部を開閉することにより、各可動部に装着された爪によって被把持物を把持し、チャックボディの内壁面と可動部との間にシール部材が配設されているつかみ装置が記載されている。また、特許文献2に記載されているのは、可動部が配設される配設孔が形成されたチャックボディと、前記可動部が挿通する挿通孔が形成されたカバー部と、前記挿通孔を構成する内壁面に装着されて外部の異物の流通を阻止する異物流通阻止部材を備えるチャック装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
昭59-166484
特開2016-120532
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のチャック装置は、円筒状のピンと結合されているつかみ爪を回動しないようにするために、ガイドピンが必要となり、部品点数が増えることによるコスト高となる。また、特許文献2に記載のチャック装置は、円柱状のフィンガに沿って延在した案内溝にフィンガの一部が挿入されることにより、フィンガの回転が規制されているが、異物流通阻止部材が接触する部分と回転を規制しているガイド部分が必要になることにより、異物流通阻止部材のないチャックと同等の剛性を得るためには、フィンガが長くなってしまうことで、チャックが大型化してしまうという問題がある。
【0006】
そこで、本発明は、上記の問題を解決するべく、部品点数を少なくして生産コストを低減しつつ、小型の防塵防水対策を行った産業用ロボットチャックを提供する。
【課題を解決するための手段】
【0007】
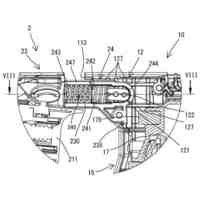
本発明は、ボディ中心に対し放射線状に配設された複数の配設孔と、前記配設孔内を往復運動可能に収容されたマスタージョウと、複数の前記マスタージョウを連結して同期動作を行わせるピストンと、前記ピストンを往復運動可能に収容するシリンダを備えたハンドチャックにおいて、楕円形状をした前記配設孔と、楕円形状をした前記マスタージョウと、前記マスタージョウに形成したパッキン溝と、前記パッキン溝に当接したシール部材と、前記ボディに配設した排気用ポートを備えることを特徴としており、配設孔及びマスタージョウが楕円形状をしていることにより、マスタージョウの回転抑制をする部材が新たに必要なくなることで、部品点数の削減による生産コスト低減を行うことができる。さらに、マスタージョウに形成したパッキン溝に当接したシール部材を設けることにより、粉塵や切削水などの異物の流入を防ぐことができ、且つ、マスタージョウ全体で回転抑制のガイドをすることができることにより、シール部材がある部分とガイド部分とを別々に配設するものより、小型にすることができる。また、ボディに配設した排気用ポートにより、シール部材により配設孔内部に溜まる気体を外部に出すことができることで、円滑に開閉することができる。
【0008】
前記パッキン溝が複数形成されていることを特徴としており、パッキン溝の量が増えるにつれて、チャック内部への異物の流入をより防ぐことができる。
【0009】
前記シール部材がリップパッキンであることを特徴としており、外部からの異物の流入を防ぎつつ、内部で生じた摩耗粉などの異物は外部に排出することができる。
【0010】
前記シリンダ内に形成され、前記配設孔と前記シリンダ間に介在するカバー部を備えることを特徴としており、ピストンを往復運動可能に収容するシリンダ内の圧力室を、カバー部を取り付けることにより作成できることから、内部組付用の開口部を一方向のみで作成でき、その結果、外観の凹凸を少なくすることで外観に異物が付きにくい流線型にすることができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
6日前
株式会社マキタ
電動工具
14日前
川崎重工業株式会社
ロボットリスト
14日前
川崎重工業株式会社
ロボットアーム
14日前
川崎重工業株式会社
ロボットアーム
14日前
日本車輌製造株式会社
締め付け工具
14日前
川崎重工業株式会社
ロボットシステム
14日前
CKD株式会社
吸着型搬送装置
28日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
27日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
今日
株式会社スター精機
ワーク搬送装置
3日前
株式会社アマダ
磁気吸着装置
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
14日前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
15日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
6日前
株式会社DailyColor
ロボットハンド
15日前
有限会社松尾エンジニアリング
連結部材
15日前
個人
ターンバックル用工具
21日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
20日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
6日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
作業機
27日前
株式会社マキタ
往復動工具
1か月前
株式会社マキタ
往復動工具
1か月前
株式会社マキタ
バッテリ駆動式機器
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
ネジ締め工具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ