TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025006659
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023107582
出願日
2023-06-29
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25B
21/02 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】不要なかじり解除制御を抑制可能な作業機を提供する。
【解決手段】作業機1は、モータ3と、ボルト又はナットの締付け作業又は緩め作業のための先端工具16を保持可能なアンビル10と、モータ3の駆動力によりアンビル10を打撃する打撃機構と、モータ3の回転方向を設定する正逆切替レバー13と、モータ3の駆動及び停止を切り替える操作がされるトリガスイッチ6と、を有し、打撃機構による打撃に伴うモータ3の回転数及び電流の少なくとも一方の変動幅から先端工具16とボルト又はナットとのかじりを検出するよう構成される。作業機1は、モータ3を設定回転方向に回転させているときにかじりを検出すると、モータ3を設定回転方向とは逆に回転させるよう構成される。
【選択図】図1
特許請求の範囲
【請求項1】
モータと、
ボルト又はナットの締付け作業又は緩め作業のための先端工具を保持可能な先端工具保持部と、
前記モータの駆動力により前記先端工具保持部を打撃する打撃機構と、
前記モータの回転方向を設定する回転方向設定部と、
前記モータの駆動及び停止を切り替える操作がされる操作部と、
前記操作部の操作に基づいて前記モータを制御する制御部と、を有し、
前記制御部は、前記打撃機構による打撃に伴う前記モータの回転数及び電流の少なくとも一方の変動幅から前記先端工具とボルト又はナットとのかじりを検出するよう構成される、
ことを特徴とする作業機。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の作業機であって、
前記制御部は、第1所定時間中における前記モータの回転数及び電流の少なくとも一方の最大値と最小値から前記変動幅を導出する、
ことを特徴とする作業機。
【請求項3】
請求項1に記載の作業機であって、
前記制御部は、前記モータを設定回転方向に回転させているときに前記かじりを検出すると、前記モータを前記設定回転方向とは逆に回転させる、
ことを特徴とする作業機。
【請求項4】
請求項3に記載の作業機であって、
前記制御部は、前記操作部に対する単一のモータ駆動操作の間に、前記設定回転方向への前記モータの回転、前記かじりの検出、及び前記設定回転方向とは逆への前記モータの回転を実行可能に構成される、
ことを特徴とする作業機。
【請求項5】
請求項1に記載の作業機であって、
前記制御部は、前記モータを設定回転方向に回転させているときに前記かじりを検出した場合、前記操作部にモータ停止操作が行われると、前記モータを前記設定回転方向とは逆に回転させる、
ことを特徴とする作業機。
【請求項6】
請求項3から5のいずれか一項に記載の作業機であって、
前記制御部は、前記かじりを検出した後、前記モータを前記設定回転方向とは逆に回転させる前に、前記モータを一時的に停止する、
ことを特徴とする作業機。
【請求項7】
モータと、
ボルト又はナットの締付け作業又は緩め作業のための先端工具を保持可能な先端工具保持部と、
前記モータの駆動力により前記先端工具保持部を打撃する打撃機構と、
前記モータの回転方向を設定する回転方向設定部と、
前記モータの駆動及び停止を切り替える操作がされる操作部と、
前記操作部の操作に基づいて前記モータを制御する制御部と、を有し、
前記制御部は、
前記モータを設定回転方向に回転させているときに前記先端工具とボルト又はナットとのかじりを検出すると、前記モータを前記設定回転方向とは逆に回転させる第1モードと、
前記モータを設定回転方向に回転させているときに前記かじりを検出した場合、前記操作部にモータ停止操作が行われると、前記モータを前記設定回転方向とは逆に回転させる第2モードと、
の少なくとも一方を有する、
ことを特徴とする作業機。
【請求項8】
請求項7に記載の作業機であって、
前記制御部は前記第1モード及び前記第2モードを有し、
ユーザが前記第1モード及び前記第2モードのいずれかを選択可能に構成される、
ことを特徴とする作業機。
【請求項9】
請求項3、4、7、8のいずれか一項に記載の作業機であって、
前記制御部は、前記かじりの検出に伴い前記モータを前記設定回転方向とは逆に回転させた後、前記モータを前記設定回転方向に回転させる、
ことを特徴とする作業機。
【請求項10】
請求項9に記載の作業機であって、
前記制御部は、前記操作部に対する単一のモータ駆動操作の間に、前記設定回転方向への前記モータの回転、前記かじりの検出、前記設定回転方向とは逆への前記モータの回転、及び前記設定回転方向への前記モータの回転を実行可能に構成される、
ことを特徴とする作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
下記特許文献1は、インナーソケットとナットのかじり(食い付き)を解除する第2の締め付けモードを有するナット締付機を開示する。第2の締め付けモードでは、締め付けが完了すると、モータを反締め付け方向に回転させ、かじりを解除する。
【先行技術文献】
【特許文献】
【0003】
特開2016-13595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の構成では、かじりを検出できず、かじりの発生有無に関わらずかじり解除制御を行う。このため、かじりが発生していない場合にもかじり解除制御を実行することになり、作業性が悪化する。
【0005】
本発明は、次の課題1、2の少なくともいずれかの解決を目的とする。
・課題1…かじりを検出可能な作業機を提供すること。
・課題2…不要なかじり解除制御を抑制可能な作業機を提供すること。
【課題を解決するための手段】
【0006】
本発明のある態様は、作業機である。この作業機は、
モータと、
ボルト又はナットの締付け作業又は緩め作業のための先端工具を保持可能な先端工具保持部と、
前記モータの駆動力により前記先端工具保持部を打撃する打撃機構と、
前記モータの回転方向を設定する回転方向設定部と、
前記モータの駆動及び停止を切り替える操作がされる操作部と、
前記操作部の操作に基づいて前記モータを制御する制御部と、を有し、
前記制御部は、前記打撃機構による打撃に伴う前記モータの回転数及び電流の少なくとも一方の変動幅から前記先端工具とボルト又はナットとのかじりを検出するよう構成される、ことを特徴とする。
【0007】
本発明の別の態様は、作業機である。この作業機は、
モータと、
ボルト又はナットの締付け作業又は緩め作業のための先端工具を保持可能な先端工具保持部と、
前記モータの駆動力により前記先端工具保持部を打撃する打撃機構と、
前記モータの回転方向を設定する回転方向設定部と、
前記モータの駆動及び停止を切り替える操作がされる操作部と、
前記操作部の操作に基づいて前記モータを制御する制御部と、を有し、
前記制御部は、
前記モータを設定回転方向に回転させているときに前記先端工具とボルト又はナットとのかじりを検出すると、前記モータを前記設定回転方向とは逆に回転させる第1モードと、
前記モータを設定回転方向に回転させているときに前記かじりを検出した場合、前記操作部にモータ停止操作が行われると、前記モータを前記設定回転方向とは逆に回転させる第2モードと、
の少なくとも一方を有する、ことを特徴とする。
【0008】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0009】
本発明によれば、上記課題1、2の少なくともいずれかの解決が可能となる。
【図面の簡単な説明】
【0010】
本発明の実施形態に係る作業機1の側断面図。
図1のA矢視拡大図であり、作業機1の操作パネル20の外観を示す図。
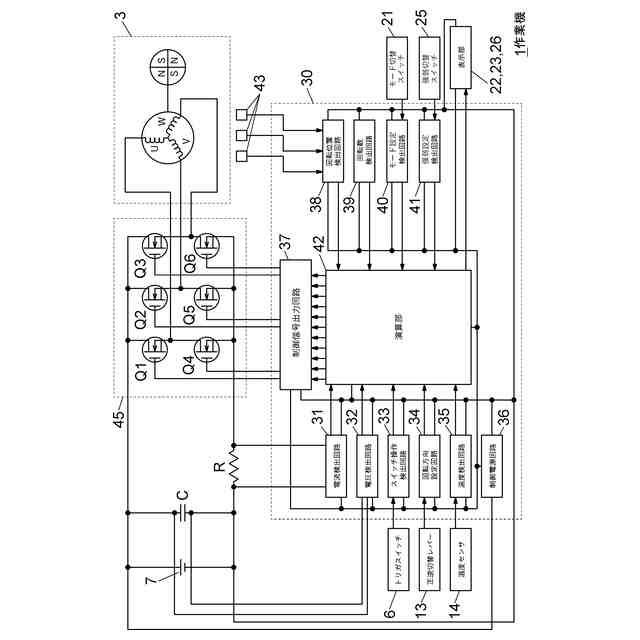
作業機1の回路ブロック図。
作業機1の制御フローチャート。
作業機1の制御フローチャート。
作業機1の通常の打撃時とかじり発生中の打撃時との各々におけるロータ回転数(モータ3の回転数)の時間変化を示すグラフ。
作業機1の通常の打撃時とかじり発生中の打撃時との各々におけるモータ3に流れる電流の時間変化を示すグラフ。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
5か月前
個人
関節モジュール
4か月前
個人
寸切りボルト回し
4か月前
個人
スロットルトリガー
4か月前
中国電力株式会社
腰袋
8か月前
株式会社エビス
連結具
1か月前
太陽工業株式会社
チャック装置
4か月前
コクヨ株式会社
補助器具
4か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
衝撃工具
6か月前
川崎重工業株式会社
ロボット
1か月前
個人
メンテナンス用スタンド
6か月前
オムロン株式会社
電動把持工具
4か月前
株式会社マキタ
動力工具
7か月前
株式会社マキタ
打撃工具
1か月前
学校法人立命館
グリッパ
4か月前
川崎重工業株式会社
罫書用治具
7か月前
CKD株式会社
把持装置
4か月前
東京計器株式会社
接触検知装置
5か月前
トヨタ自動車株式会社
ロボット
5か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
1か月前
株式会社ダイヘン
搬送装置
2か月前
個人
容器引っ掛け棒およびその使用方法
6か月前
株式会社ダイヘン
制御装置
2か月前
株式会社ダイヘン
搬送装置
8か月前
株式会社ハーモ
開閉チャック装置
5か月前
白山工業株式会社
ロボットアーム
4か月前
株式会社ダイヘン
搬送装置
8か月前
株式会社マキタ
電動ハンマ
2か月前
株式会社ダイヘン
搬送装置
3か月前
個人
回転工具およびバリ取り部品
5か月前
トヨタ自動車株式会社
ハンド構造
7か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ


































