TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024070323
公報種別
公開特許公報(A)
公開日
2024-05-23
出願番号
2022180726
出願日
2022-11-11
発明の名称
搬送装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20240516BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡易な構成によって搬送対象物を位置決めできる搬送装置を提供する。
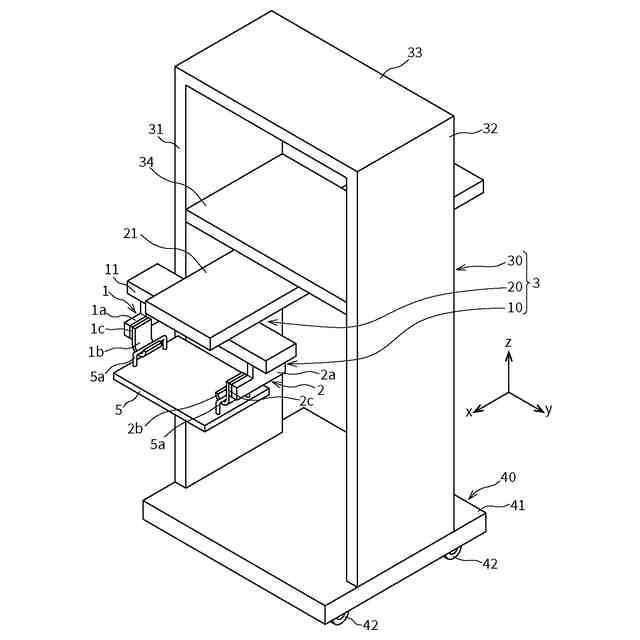
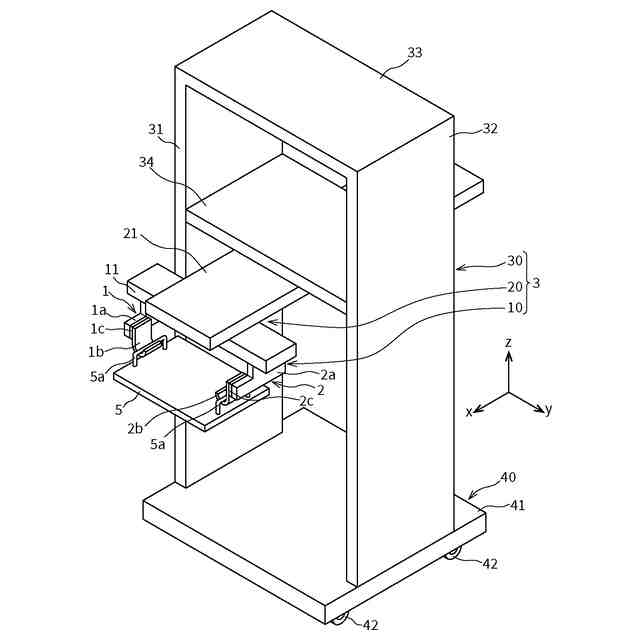
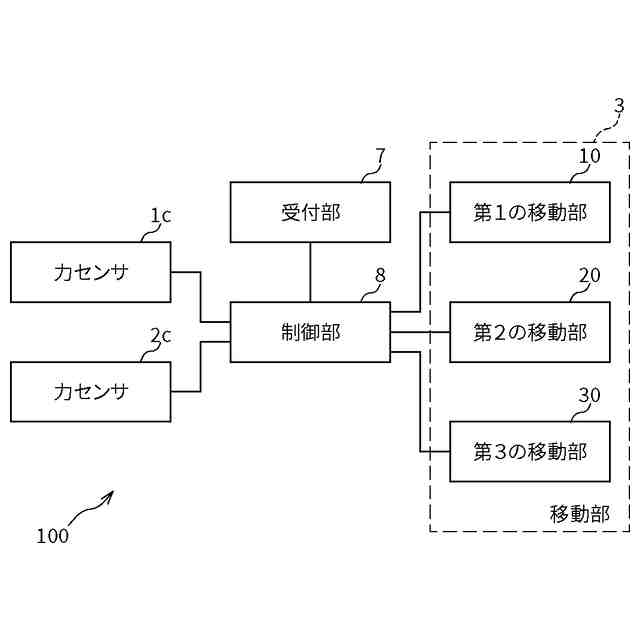
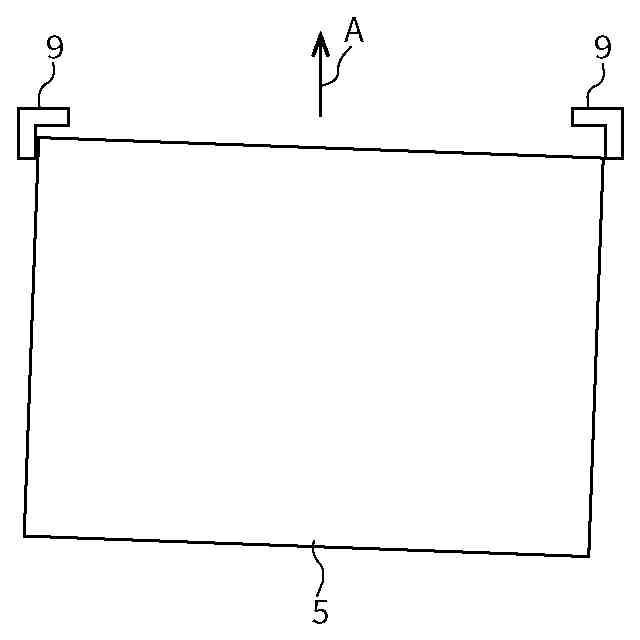
【解決手段】搬送装置100は、搬送対象物5を同時に保持する第1及び第2のハンド部1,2と、第1及び第2のハンド部1,2を3軸方向に移動させる移動部3と、移動部3を制御する制御部8とを備える。第1及び第2のハンド部1,2は、搬送対象物5を保持する第1及び第2の保持部1b,2bと、第1及び第2の保持部1b,2bに掛かる外力をそれぞれ検出する第1及び第2の力センサ1c,2cとをそれぞれ有している。制御部8は、第1及び第2の力センサ1c,2cによって検出された外力を用いて、載置面から浮かない範囲内の上向きの力を加えた状態の搬送対象物5を位置決め箇所に向かって移動させるように移動部3を制御する。このようにして、軸数を抑えた簡易な構成でも搬送対象物5の位置決めを行うことができるようになる。
【選択図】図1
特許請求の範囲
【請求項1】
水平面内の第1の方向において離間して配置されており、搬送対象物を同時に保持する第1及び第2のハンド部を備え、
前記第1及び第2のハンド部は、
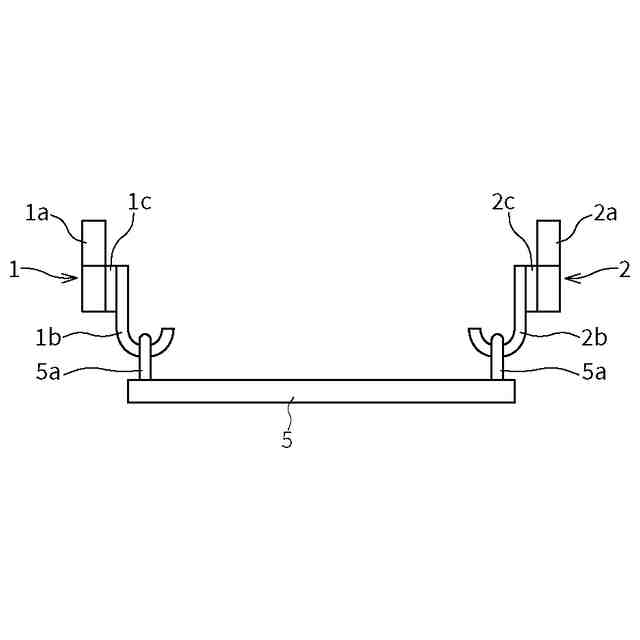
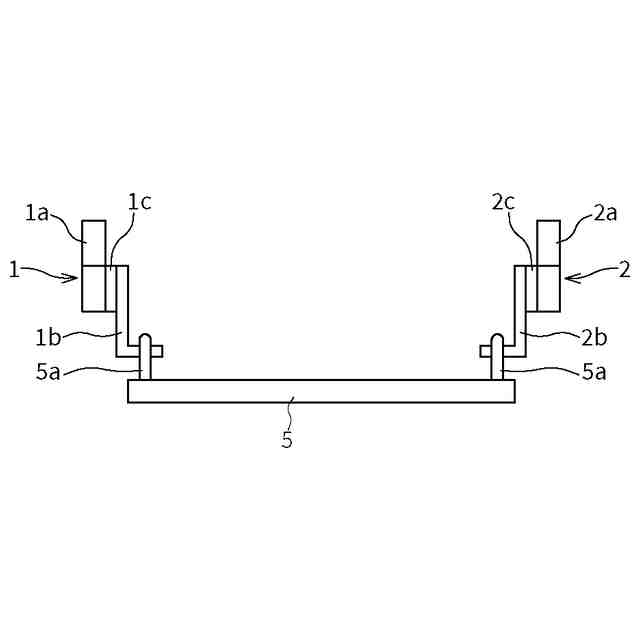
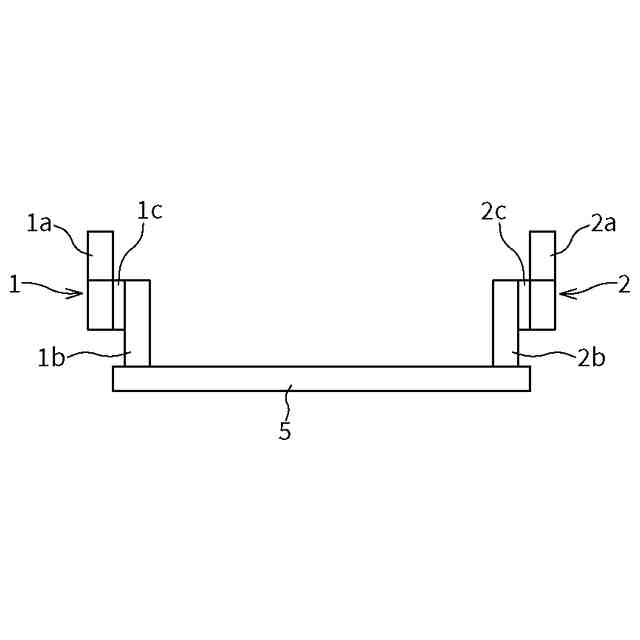
搬送対象物を保持する第1及び第2の保持部と、
前記第1及び第2の保持部に掛かる外力をそれぞれ検出する第1及び第2の力センサと、をそれぞれ有しており、
前記第1及び第2のハンド部を、前記第1の方向に独立して移動させると共に、水平面内の前記第1の方向に垂直な第2の方向、及び鉛直方向に移動させる移動部と、
前記第1及び第2の力センサによって検出された外力を用いて、載置面から浮かない範囲内の上向きの力を加えた状態の搬送対象物を、位置決め箇所に向かって移動させるように前記移動部を制御する制御部と、をさらに備えた搬送装置。
続きを表示(約 340 文字)
【請求項2】
前記制御部は、搬送対象物を位置決め箇所に向かって移動させる際に、載置面から浮かない範囲内において搬送対象物に加わる上向きの力を変化させる、請求項1記載の搬送装置。
【請求項3】
前記第1及び第2のハンド部が搬送対象物を保持した状態で、前記第1及び第2のハンド部と搬送対象物との間には遊びが存在する、請求項1記載の搬送装置。
【請求項4】
前記第1及び第2のハンド部が搬送対象物を保持した際に当該第1及び第2のハンド部における搬送対象物に当接する面は低摩擦係数の面である、請求項3記載の搬送装置。
【請求項5】
前記移動部の基端側の端部が固定された台車をさらに備えた、請求項1から請求項4のいずれか記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送対象物を位置決め箇所に向かって移動させる搬送装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、製造現場などにおいて、人間では搬送することが困難な重量の搬送対象物、例えば、溶接の治具やプラズマ電源などを搬送したいという要望がある。そのような搬送対象物を搬送するため、フォークリフトを用いることも考えられるが、フォークリフトで搬送するほど搬送対象物の重量が大きくないこともある。また、搬送対象物がパレットに載置されていない場合には、フォークリフトで搬送することが困難である。
【0003】
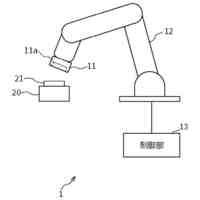
そのような搬送対象物をマニピュレータで搬送することも考えられるが、マニピュレータのハンド部が、搬送対象物の重心付近を保持することができない場合には、搬送対象物の搬送時にハンド部に対してモーメントが掛かることになる。そのモーメントに対応するためにはマニピュレータの強度を向上させる必要があり、マニピュレータが大型化するという問題がある。
【0004】
このモーメントの問題は、双腕のマニピュレータを用いて搬送対象物を2箇所で同時に保持することによって解決することができる。そのような双腕ロボットについて、動作範囲や作業性を向上させるための工夫などが行われている(例えば、特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0005】
特開2020-189364号公報
特開2022-108837号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、汎用性の高い双腕ロボットは軸数が多いため、マニピュレータ自体が重くなる。そのため、可搬重量を増やすためには、各軸に高出力のモータを使用する必要があり、双腕ロボットが大型化するという問題がある。一方、双腕ロボットを大型化しない場合には、可搬重量が小さくなるという問題がある。
【0007】
また、可搬重量を増やすために軸数を減らすことが考えられるが、軸数を減らした場合には位置決めのための細かい移動制御を行うことが難しくなるという問題もある。
【0008】
本発明は、上記課題を解決するためになされたものであり、簡易な構成により、搬送対象物の位置決めを行うことができる搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明の一態様による搬送装置は、水平面内の第1の方向において離間して配置されており、搬送対象物を同時に保持する第1及び第2のハンド部を備え、第1及び第2のハンド部は、搬送対象物を保持する第1及び第2の保持部と、第1及び第2の保持部に掛かる外力をそれぞれ検出する第1及び第2の力センサと、をそれぞれ有しており、第1及び第2のハンド部を、第1の方向に独立して移動させると共に、水平面内の第1の方向に垂直な第2の方向、及び鉛直方向に移動させる移動部と、第1及び第2の力センサによって検出された外力を用いて、載置面から浮かない範囲内の上向きの力を加えた状態の搬送対象物を、位置決め箇所に向かって移動させるように移動部を制御する制御部と、をさらに備えたものである。
【発明の効果】
【0010】
本発明の一態様による搬送装置によれば、搬送対象物を載置面上で滑らせながら移動させることができ、例えば、載置面に配置された位置決め部材による位置決めを行うことができるようになる。そのため、簡易な構成により搬送対象物の位置決めを実現することができるようになる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
26日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
19日前
国立大学法人金沢大学
ロボット
5日前
川崎重工業株式会社
ロボットリスト
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
株式会社ケー・エフ・シー
締結構造
9日前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
日本信号株式会社
作業機制御システム
19日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
20日前
株式会社安川電機
ロボット
1か月前
株式会社スター精機
ワーク搬送装置
23日前
株式会社マキタ
集塵アタッチメント
19日前
トヨタ自動車株式会社
把持装置、把持方法
13日前
アピュアン株式会社
衝撃工具
今日
トヨタ自動車株式会社
制御装置及び制御方法
1か月前
川崎重工業株式会社
ロボットシステム
26日前
モトコマ株式会社
寄せポンチホルダー
1か月前
株式会社コスメック
把持装置
6日前
国立大学法人 東京大学
ロボットアーム
6日前
株式会社DailyColor
ロボットハンド
1か月前
個人
ターンバックル用工具
1か月前
株式会社ダイヘン
ロボット制御システム
9日前
有限会社松尾エンジニアリング
連結部材
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
1か月前
株式会社不二越
ロボットビジョンシステム
12日前
原利興工業有限公司
工具用スリーブ
5日前
株式会社マキタ
作業機
5日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ