TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018823
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122845
出願日
2023-07-27
発明の名称
ロボットシステム
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
17/02 20060101AFI20250130BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】狭小なスペースにおいてハンドの動作範囲を拡大する。
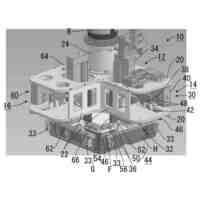
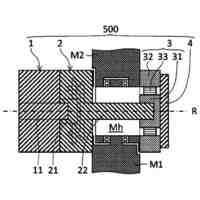
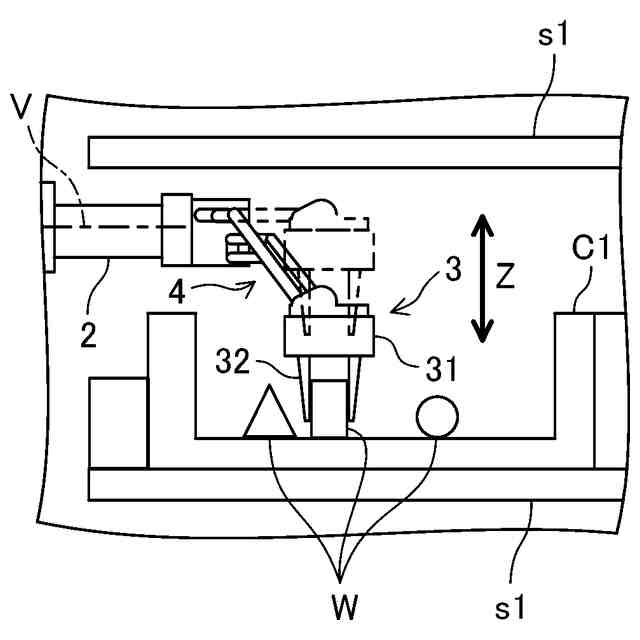
【解決手段】ロボットシステム100は、ロボット1と、前記ロボット1を制御する制御装置9とを備え、前記ロボット1は、所定の第1方向Xへ伸縮するロボットアーム2と、前記ロボットアーム2に連結されたリスト4と、前記リスト4に連結されたハンド3とを有し、前記リスト4は、前記ハンド3を前記第1方向Xと交差する第2方向Zへ移動させ、前記制御装置9は、前記ロボットアーム2を前記第1方向Xへ伸長させることによって前記リスト4及び前記ハンド3を前記第1方向Xへ移動させる進出動作と、前記進出動作の後に前記リスト4によって前記ハンド3を前記第2方向Zへ移動させる昇降動作とを前記ロボット1に実行させる。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットと、
前記ロボットを制御する制御装置とを備え、
前記ロボットは、
所定の第1方向へ伸縮するロボットアームと、
前記ロボットアームに連結されたリストと、
前記リストに連結されたハンドとを有し、
前記リストは、前記ハンドを前記第1方向と交差する第2方向へ移動させ、
前記制御装置は、前記ロボットアームを前記第1方向へ伸長させることによって前記リスト及び前記ハンドを前記第1方向へ移動させる進出動作と、前記進出動作の後に前記リストによって前記ハンドを前記第2方向へ移動させる昇降動作とを前記ロボットに実行させるロボットシステム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
前記リストは、前記第1方向及び前記第2方向の両方と交差する方向に延びるピッチ軸及び前記第1方向に延びるロール軸の少なくとも一方の回りに回転可能に前記ハンドを支持し、
前記制御装置は、前記進出動作において、前記ピッチ軸又は前記ロール軸回りの前記ハンドの回転姿勢を前記昇降動作時とは異なる姿勢に変更して、前記ロボットアームを前記第1方向へ伸長させるロボットシステム。
【請求項3】
請求項2に記載のロボットシステムにおいて、
前記制御装置は、前記進出動作において、前記ピッチ軸又は前記ロール軸回りの前記ハンドの回転姿勢を、前記進出動作時に前記リスト及び前記ハンドが通るスペースの大きさに応じて変更するロボットシステム。
【請求項4】
請求項1に記載のロボットシステムにおいて、
前記リストは、前記第1方向及び前記第2方向の両方と交差する方向に延びるピッチ軸及び前記第1方向に延びるロール軸の少なくとも一方の回りに回転可能に前記ハンドを支持し、
前記制御装置は、
前記昇降動作の後に前記ハンドにワークを保持させる保持動作と、前記保持動作の後に前記ロボットアームを前記第1方向へ収縮させることによって前記リスト及び前記ハンドを前記第1方向へ移動させる後退動作とを前記ロボットにさらに実行させ、
前記後退動作において、前記ピッチ軸又は前記ロール軸回りの前記ハンドの回転姿勢を前記昇降動作時とは異なる姿勢に変更して、前記ロボットアームを前記第1方向へ収縮させるロボットシステム。
【請求項5】
請求項4に記載のロボットシステムにおいて、
前記制御装置は、前記後退動作において、前記ピッチ軸又は前記ロール軸回りの前記ハンドの回転姿勢を、前記後退動作時に前記リスト及び前記ハンドが通るスペースの大きさに応じて変更するロボットシステム。
【請求項6】
請求項4に記載のロボットシステムにおいて、
前記制御装置は、前記後退動作において、前記ハンドに保持されたワークが他の物体に接触する場合に、前記ピッチ軸又は前記ロール軸回りの前記ハンドの回転姿勢を、前記後退動作時に前記リスト及び前記ハンドが通るスペースの大きさに応じて変更するロボットシステム。
【請求項7】
請求項1に記載のロボットシステムにおいて、
前記リストは、前記第1方向に延びるロール軸回りに回転可能であり、
前記制御装置は、前記昇降動作時に、前記ロール軸回りの前記リストの回転姿勢を変更することによって前記第2方向の向きを変更するロボットシステム。
【請求項8】
請求項1に記載のロボットシステムにおいて、
前記リストは、前記第1方向と交差する方向に延びるヨー軸回りに回転可能に前記ハンドを支持し、
前記制御装置は、前記昇降動作時に、前記ヨー軸回りの前記ハンドの回転姿勢を変更するロボットシステム。
【請求項9】
請求項1に記載のロボットシステムにおいて、
前記ロボットは、
箱状の本体を含む台車と、
前記台車に配置され、前記ロボットアームを所定の第3方向に昇降可能に支持する昇降機とをさらに備え、
前記台車は、前記台車の上面から下方に窪む凹部を有し、
前記昇降機は、前記凹部に配置され、前記ロボットアームを前記上面よりも下方まで降下させるロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、ロボットシステムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来より、ロボットアームとハンドとを有するロボットが知られている。例えば、特許文献1には、ロボットアームの先端にハンドが取り付けられたロボットが開示されている。このロボットは、部品棚に配置された部品箱の中のワークをハンドによってピッキングする。ロボットは、部品棚における狭小なスペースにハンドを挿入する。ハンドは、その状態から昇降動作及びピッチ動作を行う。
【先行技術文献】
【特許文献】
【0003】
特開2014-124716号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前述の棚のような狭小なスペースで作業を行う場合、ロボットの動作、例えば、ロボットアームの動作は制限される。ロボットの動作が制限される環境下においては、ハンドの動作範囲を拡大することによって、作業の柔軟性が向上する。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、狭小なスペースにおいてハンドの動作範囲を拡大することにある。
【課題を解決するための手段】
【0006】
本開示のロボットシステムは、ロボットと、前記ロボットを制御する制御装置とを備え、前記ロボットは、所定の第1方向へ伸縮するロボットアームと、前記ロボットアームに連結されたリストと、前記リストに連結されたハンドとを有し、前記リストは、前記ハンドを前記第1方向と交差する第2方向へ移動させ、前記制御装置は、前記ロボットアームを前記第1方向へ伸長させることによって前記リスト及び前記ハンドを前記第1方向へ移動させる進出動作と、前記進出動作の後に前記リストによって前記ハンドを前記第2方向へ移動させる昇降動作とを前記ロボットに実行させる。
【発明の効果】
【0007】
前記ロボットシステムによれば、狭小なスペースにおいてハンドの動作範囲を拡大できる。
【図面の簡単な説明】
【0008】
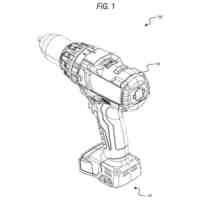
図1は、ロボットシステムを示す模式図である。
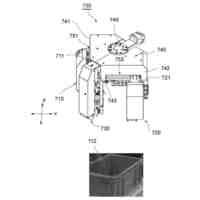
図2は、移送作業におけるコンテナ内でのリスト及びハンドの動きを説明するための模式図である。
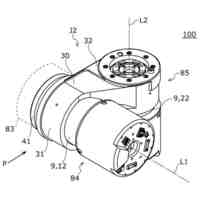
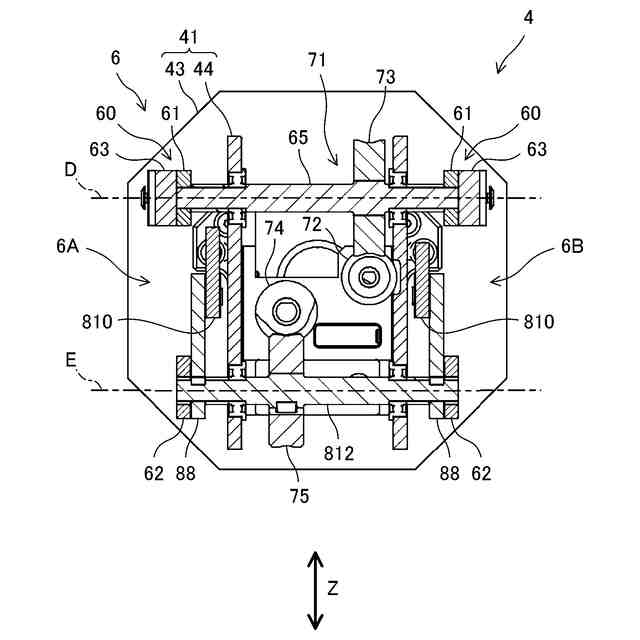
図3は、基本状態におけるリストの斜視図である。
図4は、基本状態におけるリストの側面図である。
図5は、基本状態におけるリストの平面図である。
図6は、図5のVI-VI線におけるリストの断面図である。
図7は、進出状態におけるリストの側面図である。
図8は、ハンドが第2方向へ最も進出した状態におけるリストの側面図である。
図9は、ハンドが第2方向へ最も進出した状態におけるリストの斜視図である。
図10は、ピッチ動作後のリストの側面図である。
図11は、ハンドが第2方向へ最も進出し且つピッチ角度が90度の場合のリスト4の側面図である。
図12は、ロール動作後のリストの斜視図である。
図13は、リンク機構がロール軸回りに回転した状態のリストの正面図である。
図14は、ヨー動作後のリストの側面図である。
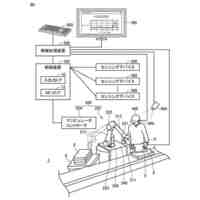
図15は、制御装置の概略的なハードウェア構成を示す図である。
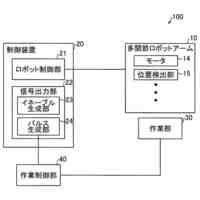
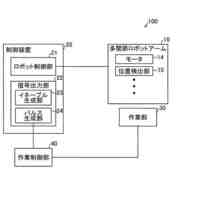
図16は、制御装置の制御系統の構成を示すブロック図である。
図17は、進出動作時のハンド及びリストの側面図である。
図18は、昇降動作時のハンド及びリストの側面図である。
図19は、後退動作を行う前のハンド及びリストの側面図である。
図20は、進出動作前にピッチ軸回りのハンドの姿勢が変更された状態のハンド及びリストの側面図である。
図21は、進出動作時のハンドの回転姿勢をロール動作によって変更した場合のハンド及びリストの正面図である。
図22は、リンク機構がロール軸回りに回転した状態のハンド及びリストの正面図である。
図23は、コンテナの上方へ配置されたハンド及びリストの正面図である。
図24は、ロール動作後のハンド及びリストの正面図である。
図25は、直進動作後のハンド及びリストの正面図である。
図26は、隣接する複数のワークをピッキングする際のヨー動作前のハンド及びリストの側面図である。
図27は、隣接する複数のワークをピッキングする際のヨー動作後のハンド及びリストの側面図である。
図28は、ワークを把持した状態でハンドを第2方向において退出させたハンド及びリストの側面図である。
図29は、ワークを把持した状態のハンドをピッチ軸回りに回転させたハンド及びリストの側面図である。
図30は、後退動作時のハンドの回転姿勢をロール動作によって変更した場合のハンド及びリストの正面図である。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。尚、本開示において、平行、直交又は同一とは、厳密な平行、直交又は同一だけでなく、実質的な平行、直交又は同一も含む。
【0010】
図1は、ロボットシステム100を示す模式図である。ロボットシステム100は、ロボット1と、ロボット1を制御する制御装置9とを備える。例えば、ロボット1は、移送作業を行う。具体的には、ロボット1は、棚Sに載置された第1コンテナC1からワークWを取り出して、ワークWを第2コンテナC2へ移送する。第1コンテナC1は、ワークWを収容する移送元のコンテナである。第2コンテナC2は、ワークWを収容する移送先のコンテナである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
手術支援システム、手術装置および手術支援システムの制御方法
4日前
川崎重工業株式会社
散布物分布状態の表示処理装置、表示処理方法、及び、表示処理プログラム
11日前
川崎重工業株式会社
ロボットの動作方法およびプログラム
11日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
11日前
株式会社クレスコ
補助吸着具
19日前
株式会社不二越
ロボット
11日前
株式会社イノウ
給油口キャップ用開閉具
12日前
川崎重工業株式会社
制動システム
11日前
住友重機械工業株式会社
ロボット
5日前
株式会社不二越
垂直多関節ロボット
12日前
芝浦機械株式会社
双腕ロボット
4日前
アイホン株式会社
ネジ締めカウントシステム
13日前
トヨタ自動車株式会社
荷姿影響緩和方法
1日前
パナソニック株式会社
工具
12日前
パナソニック株式会社
工具
12日前
住友重機械工業株式会社
ロボット及びカバー
5日前
株式会社マキタ
打ち込み工具
13日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
5日前
住友重機械工業株式会社
アクチュエータ支持部材
4日前
住友ナコ フォ-クリフト株式会社
ベアリングナット締付具
1日前
株式会社星野商店
塗装ロボット用保護カバー
12日前
学校法人常翔学園
エンドエフェクタ及びロボット
11日前
ヤンマーホールディングス株式会社
駆動装置、作業機械
15日前
オムロン株式会社
協調作業システム、方法およびプログラム
15日前
株式会社エクサウィザーズ
システムおよびプログラム
20日前
株式会社国際電気通信基礎技術研究所
ロボット装置、ロボットアーム、及び手先効果器
12日前
株式会社東芝
処理装置、複合現実デバイス、処理方法、プログラム、及び記憶媒体
20日前
朝日インテック株式会社
付勢力発生装置および動作補助装置
19日前
株式会社栗本鐵工所
材料の移送装置、および、ニードルの清掃方法
12日前
株式会社東芝
制御方法、複合現実システム、複合現実デバイス、プログラム、及び記憶媒体
20日前
株式会社Mujin
グリッパアッセンブリ、ロボットシステム及びその操作方法
13日前
株式会社東芝
処理装置、処理システム、複合現実デバイス、処理方法、プログラム、及び記憶媒体
20日前
ミルウォーキー エレクトリック ツール コーポレイション
動力工具における感知磁場指向制御
11日前
川崎重工業株式会社
ロボットの動作方法およびプログラム
11日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
11日前
株式会社安川電機
搬送ロボットおよびロボットシステム
19日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ