TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008996
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111678
出願日
2023-07-06
発明の名称
ロボット
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】チャンバ内における発ガス抑制と、メンテナンス性との両立に有効なロボットを提供する。
【解決手段】ロボット2は、ハンド20と、複数の関節J10をそれぞれ駆動する複数のアクチュエータ40と、を備え、複数のアクチュエータ40のそれぞれは、駆動する関節J10において、多関節アーム3の1のリンクに固定される本体110,210,340と、軸線に沿って本体110,210,340から突出して多関節アーム3の他のリンクに固定され、軸線まわりに回転する出力軸120,220,350と、を有し、多関節アーム3は、複数のアクチュエータ40のそれぞれに対応して、本体110,210,340とは別に取外し可能な状態で1のリンクに取り付けられ、1のリンクと出力軸120,220,350との間を密封するシール部材140,240,370を更に有する。
【選択図】図6
特許請求の範囲
【請求項1】
基板を支持するハンドと、
ベースと、
前記ハンドを前記ベースに連結するアームと、
前記アームに沿って並び、それぞれが鉛直な軸線まわりに動作して、前記ベースに対する前記ハンドの位置・姿勢を変更する複数の関節と、
を有する多関節アームと、
前記複数の関節をそれぞれ駆動する複数のアクチュエータと、
を備え、
前記複数のアクチュエータのそれぞれは、
駆動する関節において、前記多関節アームの1のリンクに固定される本体と、
前記軸線に沿って前記本体から突出して前記多関節アームの他のリンクに固定され、前記軸線まわりに回転する出力軸と、
を有し、
前記多関節アームは、前記複数のアクチュエータのそれぞれに対応して、前記本体とは別に取外し可能な状態で前記1のリンクに取り付けられ、前記1のリンクと前記出力軸との間を密封するシール部材を更に有する、
ロボット。
続きを表示(約 1,600 文字)
【請求項2】
前記シール部材は、
外方から前記1のリンクに取り付けられるカバーと、
前記カバーと前記1のリンクとの間を密封するアウターシールと、
前記カバーに対する前記出力軸の回転を許容しつつ、前記カバーと前記出力軸との間を密封するインナーシールと、
を含む、
請求項1記載のロボット。
【請求項3】
前記多関節アームは、前記ベースと前記ハンドとの間において互いに連結する第1リンクと第2リンクとを有し、
前記複数のアクチュエータは、前記第1リンクと前記第2リンクとを連結する関節を駆動するアームアクチュエータを含み、
前記アームアクチュエータにおいて、
前記本体は前記第1リンクに固定され、前記出力軸は前記第2リンクに固定され、
前記カバーは前記第1リンクから前記第2リンクに向かって膨出し、
前記軸線に沿った方向にて、前記インナーシールの位置が、前記アウターシールの位置に比較して前記第1リンクから離れている、
請求項2記載のロボット。
【請求項4】
前記第2リンクは、前記第1リンクに向かって開口し、前記第1リンクから膨出した前記アームアクチュエータの前記カバーを受け入れる凹部を有する、
請求項3記載のロボット。
【請求項5】
前記アームアクチュエータは、前記軸線に沿って前記出力軸を貫通し、前記第1リンクの内部空間と前記第2リンクの内部空間とを連通させる貫通孔を有する、
請求項3又は4記載のロボット。
【請求項6】
前記第1リンクは、前記第2リンクが位置する方とは反対に向かって前記貫通孔を外部に露出させる開口を有し、
前記多関節アームは、前記開口を塞ぐバックカバーを更に有する、
請求項5記載のロボット。
【請求項7】
前記バックカバーは、前記貫通孔と前記第1リンクの内部空間とを連通させるように、前記第1リンクに向かって開口した凹部を有する、
請求項6記載のロボット。
【請求項8】
前記多関節アームは、前記ベースに連結される前記リンクを含み、
前記複数のアクチュエータは、
前記ベースと前記リンクとを連結する関節を駆動するベースアクチュエータを含み、
前記ベースは、前記多関節アームの少なくとも一部が収容されるチャンバの内外を仕切るフランジを含み、
前記ベースアクチュエータにおいて、
前記本体はチャンバの外部に位置し、
前記出力軸は、前記フランジを貫通して前記リンクに固定され、
前記カバーは前記フランジに取り付けられる、
請求項2記載のロボット。
【請求項9】
前記フランジに固定され、前記ベースアクチュエータの前記本体を昇降させる昇降アクチュエータを更に備え、
前記ベースアクチュエータの前記カバーは、前記昇降アクチュエータによる前記本体の昇降に応じて伸縮する伸縮部を有する、
請求項8記載のロボット。
【請求項10】
前記複数のアクチュエータは、前記ベースを基準にして最も遠位にある関節において、鉛直なハンド軸線まわりに前記ハンドを回転させるハンドアクチュエータを含み、
前記多関節アームは、前記ハンドと共通の前記ハンド軸線まわりに回転する第2ハンドを更に有し、
前記ハンドアクチュエータの前記出力軸は前記他のリンクとしての前記ハンドに固定され、
前記ハンドアクチュエータは、前記出力軸を貫通して前記第2ハンドに固定され、前記出力軸とは独立して回転する第2出力軸を更に有し、
前記ロボットは、取外し可能な状態で前記出力軸に取り付けられ、前記出力軸と前記第2出力軸との間を密封する第2シール部材を更に備える、
請求項1又は2記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、基台と、第1アームと、第2アームと、第3アームとを備える基板搬送ロボットが開示されている。第1アームは、基台に設けられた第1サーボモータから、第1動力伝達手段により伝達された動力によって駆動される。第2アームは、基台に設けられた第2サーボモータから、第2動力伝達手段により伝達された動力によって駆動される。第3アームは、連動手段により伝達された動力によって第2アームと連動する。
【先行技術文献】
【特許文献】
【0003】
特開2005-039047号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、チャンバ内における発ガス抑制と、メンテナンス性との両立に有効なロボットを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットは、基板を支持するハンドと、ベースと、ハンドをベースに連結するアームと、アームに沿って並び、それぞれが鉛直な軸線まわりに動作して、ベースに対するハンドの位置・姿勢を変更する複数の関節と、を有する多関節アームと、複数の関節をそれぞれ駆動する複数のアクチュエータと、を備え、複数のアクチュエータのそれぞれは、駆動する関節において、多関節アームの1のリンクに固定される本体と、軸線に沿って本体から突出して多関節アームの他のリンクに固定され、軸線まわりに回転する出力軸と、を有し、多関節アームは、複数のアクチュエータのそれぞれに対応して、本体とは別に取外し可能な状態で1のリンクに取り付けられ、1のリンクと出力軸との間を密封するシール部材を更に有する。
【発明の効果】
【0006】
本開示によれば、チャンバ内における発ガス抑制と、メンテナンス性との両立に有効なロボットを提供することができる。
【図面の簡単な説明】
【0007】
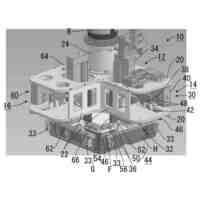
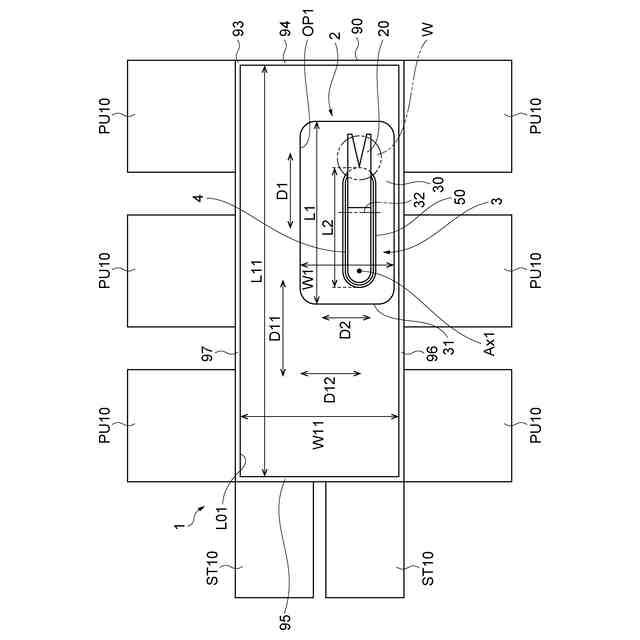
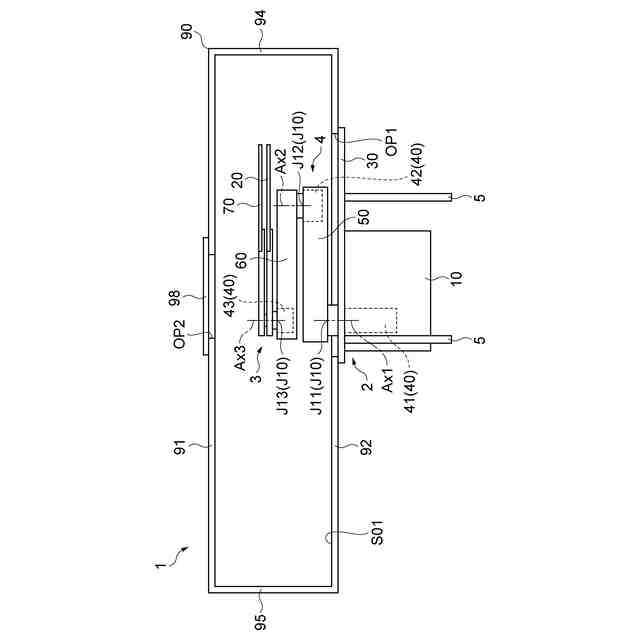
基板搬送装置の内部を例示する平面図である。
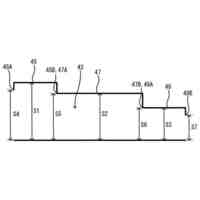
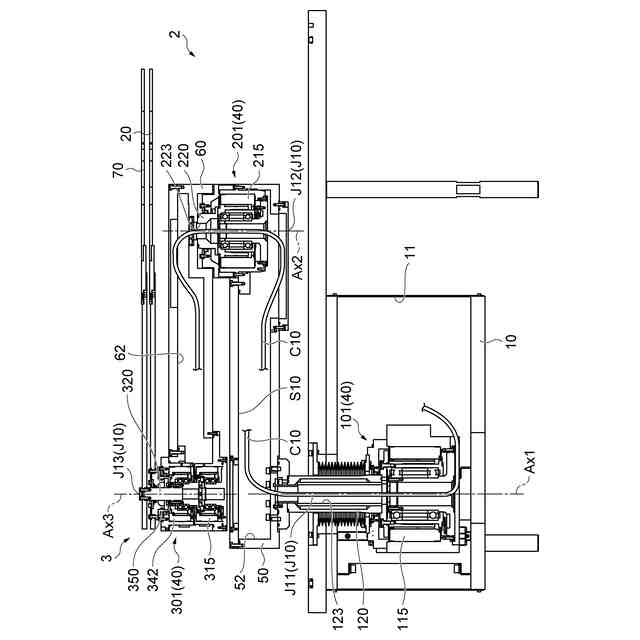
図1中のII-II線に沿った断面図である。
図2中のロボットの底面図である。
図1中のIV-IV線に沿った断面図である。
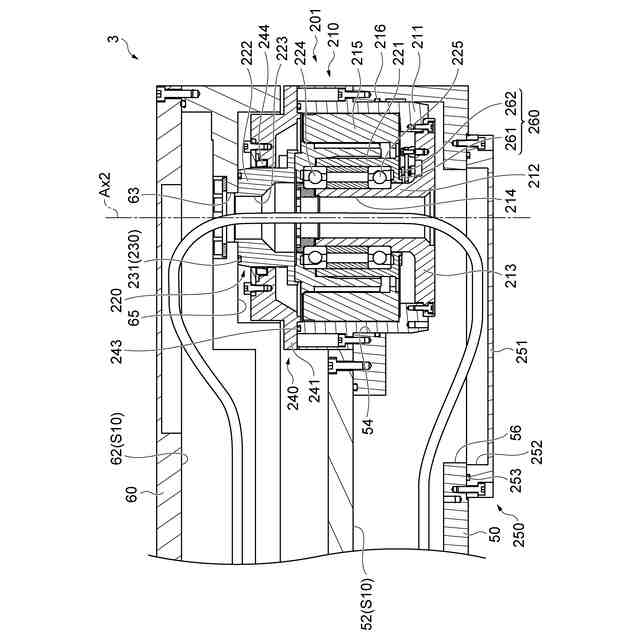
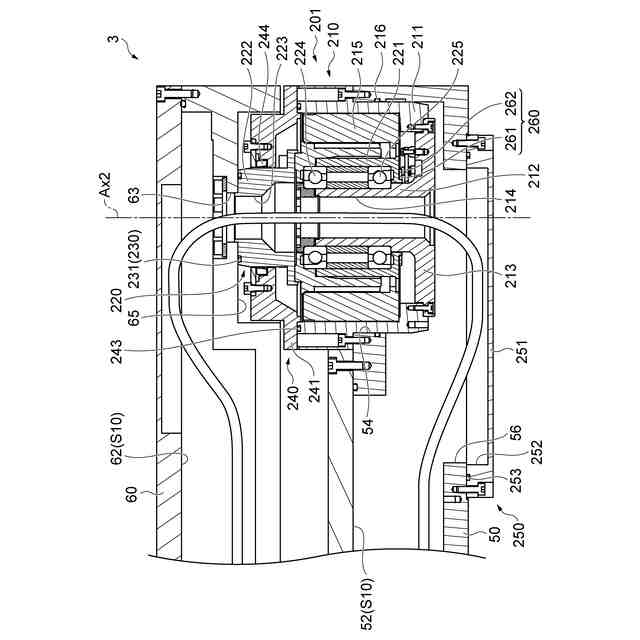
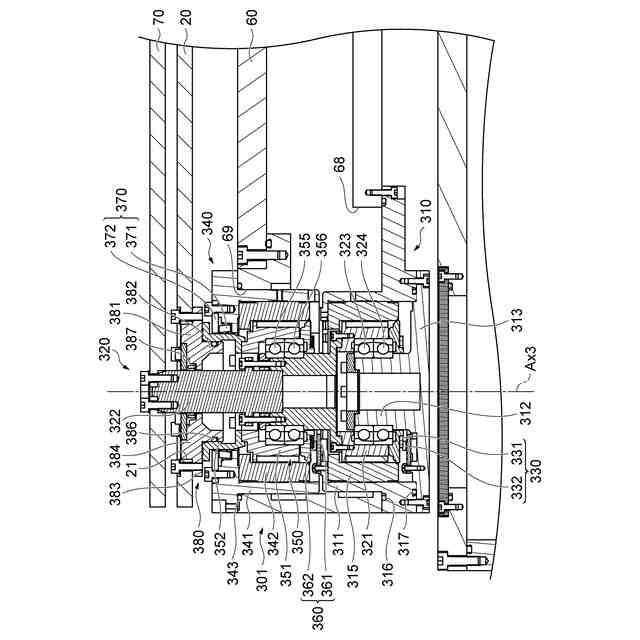
図4中の第1アームモータの拡大図である。
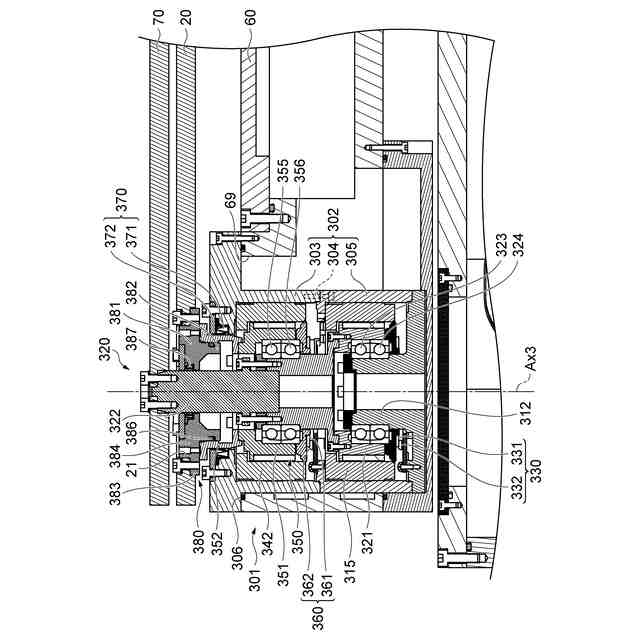
図4中の第2アームモータの拡大図である。
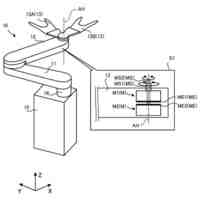
図4中のハンドモータの拡大図である。
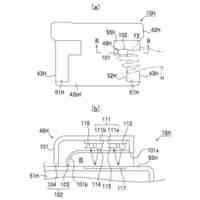
ハンドモータの変形例を示す図である。
第2アームモータの変形例を示す図である。
ハンドモータの他の変形例を示す図である。
ハンドモータの更に他の変形例を示す図である。
チューブ及び空冷流路を例示する図である。
ケーブルの配線を例示する図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0009】
〔基板搬送装置〕
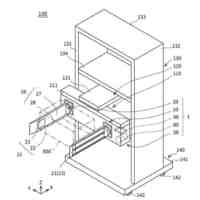
図1及び図2に示す基板搬送装置1は、基板Wが保管される1以上のステーションST10と、複数の処理モジュールPU10との間で基板Wを搬送する装置である。基板Wの例としては、半導体基板、ガラス基板、マスク基板、又はFPD(FlatPanelDisplay)基板等が挙げられる。基板搬送装置1は、チャンバ90と、ロボット2とを備える。チャンバ90は、長手方向D11と、長手方向D11に垂直な短手方向D12とを有する。長手方向D11と短手方向D12とが水平面に沿うように配置される。
【0010】
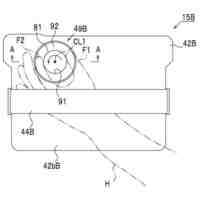
チャンバ90は、上下に並ぶ天板91と底板92とを有し、底板92と底板92との間の空間を包囲する周壁93を更に有する。以下、周壁93に包囲される空間を搬送空間S01という。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
制御装置及び制御装置の冷却方法
8日前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
23日前
株式会社安川電機
搬送ロボットおよびロボットシステム
16日前
OMC株式会社
ロボット
23日前
株式会社クレスコ
補助吸着具
16日前
株式会社不二越
ロボット
8日前
株式会社エビス
腰ベルト用連結具
23日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
ロボット
2日前
川崎重工業株式会社
制動システム
8日前
株式会社イノウ
給油口キャップ用開閉具
9日前
株式会社不二越
垂直多関節ロボット
9日前
アイホン株式会社
ネジ締めカウントシステム
10日前
芝浦機械株式会社
双腕ロボット
1日前
株式会社デンソーウェーブ
ロボット制御システム
29日前
パナソニック株式会社
工具
9日前
パナソニック株式会社
工具
9日前
アピュアン株式会社
エアー式衝撃工具
26日前
住友重機械工業株式会社
ロボット及びカバー
2日前
株式会社マキタ
打ち込み工具
10日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
2日前
住友重機械工業株式会社
アクチュエータ支持部材
1日前
株式会社マキタ
インパクト工具
24日前
株式会社マキタ
インパクト工具
24日前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
中国電力株式会社
電動ドライバー
1か月前
SB C&S株式会社
治具セット
23日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
26日前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
モバイルロボット
1か月前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
1か月前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
1か月前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
1か月前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
1か月前
シナノケンシ株式会社
把持装置
1か月前
株式会社星野商店
塗装ロボット用保護カバー
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ