TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008994
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111675
出願日
2023-07-06
発明の名称
ロボット
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
17/00 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】基板の位置決め精度向上に有効なロボットを提供する。
【解決手段】ロボット2は、基板Wを支持するハンド20と、ベース10と、ハンド20をベース10に連結するアーム4と、アーム4に沿って並び、それぞれが鉛直な軸線まわりに動作して、ベース10に対するハンド20の位置・姿勢を変更する複数の関節J10と、を有する多関節アーム3と、複数の関節J10をそれぞれ駆動する複数のモータと、を備え、複数のモータのそれぞれがダイレクトドライブモータであり、駆動する関節J10に配置されている。
【選択図】図4
特許請求の範囲
【請求項1】
基板を支持するハンドと、
ベースと、
前記ハンドを前記ベースに連結するアームと、
前記アームに沿って並び、それぞれが鉛直な軸線まわりに動作して、前記ベースに対する前記ハンドの位置・姿勢を変更する複数の関節と、
を有する多関節アームと、
前記複数の関節をそれぞれ駆動する複数のモータと、
を備え、
前記複数のモータのそれぞれがダイレクトドライブモータであり、駆動する関節に配置されている、ロボット。
続きを表示(約 1,800 文字)
【請求項2】
前記多関節アームの少なくとも一部が収容されるチャンバの内部において密封され、前記チャンバの外部に連通するように前記多関節アームの内部に形成された配線空間と、
前記配線空間を経て、前記複数のモータのうち前記チャンバの内部に位置する前記モータに配線されるケーブルと、
を更に備える、
請求項1記載のロボット。
【請求項3】
前記複数の関節のそれぞれは、前記多関節アームにおいて、前記ベースに連なるベース側リンクと、前記ハンドに連なるハンド側リンクとを連結し、
前記複数のモータのそれぞれは、
前記ベース側リンクに固定されるステータと、
前記ハンド側リンクに固定され、前記ステータが発生する回転磁界により前記軸線まわりに回転する出力軸と、
を有する、
請求項2記載のロボット。
【請求項4】
前記複数のモータは、
前記ベースから最も遠位にある関節において鉛直なハンド軸線まわりに前記ハンドを回転させるハンドモータと、
前記ハンドモータの位置を変更するように2以上の関節をそれぞれ駆動する2以上のアームモータと、
を含み、
前記2以上のアームモータのそれぞれは、
出力軸と、
前記出力軸に回転磁界を作用させることで関節を駆動するステータと、
前記出力軸を貫通して前記配線空間の一部となる貫通孔と、
を有する、
請求項2記載のロボット。
【請求項5】
前記複数の関節のそれぞれは、前記多関節アームにおいて、前記ベースに連なるベース側リンクと、前記ハンドに連なるハンド側リンクとを連結し、
前記ロボットは、前記2以上のアームモータのそれぞれに対応して、
前記出力軸と前記ベース側リンクとの間を密封するベース側シール部材と、
前記出力軸と前記ハンド側リンクとの間を密封するハンド側シール部材と、
を更に備える、
請求項4記載のロボット。
【請求項6】
前記2以上のアームモータのそれぞれにおいて、
前記ステータは前記ベース側リンクに固定され、
前記出力軸は前記ハンド側リンクに固定され、
前記ベース側シール部材は、前記ベース側リンクに対する前記出力軸の回転を許容しながら、前記出力軸に密着するメカニカルシールを含む、
請求項5記載のロボット。
【請求項7】
前記ベースと、前記アーム及びハンドとの間を仕切るように広がって、前記チャンバの内外を仕切るフランジを更に備え、
前記2以上のアームモータは、前記ベースから最も近位にあるベースモータを含み、
前記ベースモータの前記ステータは前記チャンバの外部に位置し、
前記ベースモータの前記出力軸は前記フランジを貫通して前記チャンバの内部の前記ハンド側リンクに固定され、
前記ベースモータに対する前記ベース側シール部材は、前記出力軸と前記フランジとの間を密封する、
請求項6記載のロボット。
【請求項8】
前記ベースは、前記フランジに固定され、前記ベースモータの前記ステータを昇降させる昇降アクチュエータを有し、
前記ベースモータに対する前記ベース側シール部材は、
前記フランジに対する前記出力軸の回転を許容しつつ、前記出力軸に密着するメカニカルシールと、
前記メカニカルシールと前記フランジとの間を密封し、前記ベースモータの前記ステータの昇降に応じて伸縮する伸縮シールと、
を含む、
請求項7記載のロボット。
【請求項9】
前記2以上のアームモータはラジアルギャップモータであり、
前記ハンドモータはアキシアルギャップモータである、
請求項4~8のいずれか一項記載のロボット。
【請求項10】
前記多関節アームは、前記ハンドと共通の前記ハンド軸線まわりに回転する第2ハンドを更に有し、
前記ハンドモータは、前記ハンドと、前記第2ハンドとを独立して回転させる2軸のダイレクトドライブモータである、
請求項4~8のいずれか一項記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、基台と、第1アームと、第2アームと、第3アームとを備える基板搬送ロボットが開示されている。第1アームは、基台に設けられた第1サーボモータから、第1動力伝達手段により伝達された動力によって駆動される。第2アームは、基台に設けられた第2サーボモータから、第2動力伝達手段により伝達された動力によって駆動される。第3アームは、連動手段により伝達された動力によって第2アームと連動する。
【先行技術文献】
【特許文献】
【0003】
特開2005-039047号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、基板の位置決め精度向上に有効なロボットを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットは、基板を支持するハンドと、ベースと、ハンドをベースに連結するアームと、アームに沿って並び、それぞれが鉛直な軸線まわりに動作して、ベースに対するハンドの位置・姿勢を変更する複数の関節と、を有する多関節アームと、複数の関節をそれぞれ駆動する複数のモータと、を備え、複数のモータのそれぞれがダイレクトドライブモータであり、駆動する関節に配置されている。
【発明の効果】
【0006】
本開示によれば、基板の位置決め精度向上に有効なロボットを提供することができる。
【図面の簡単な説明】
【0007】
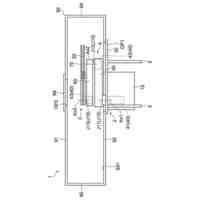
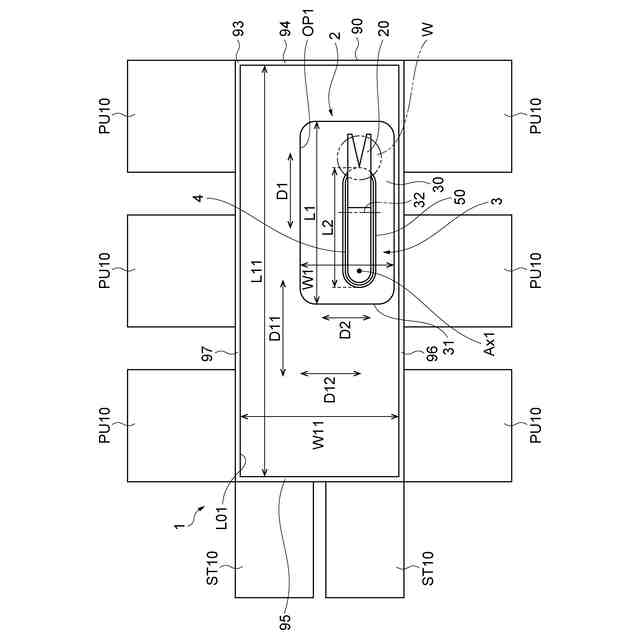
基板搬送装置の内部を例示する平面図である。
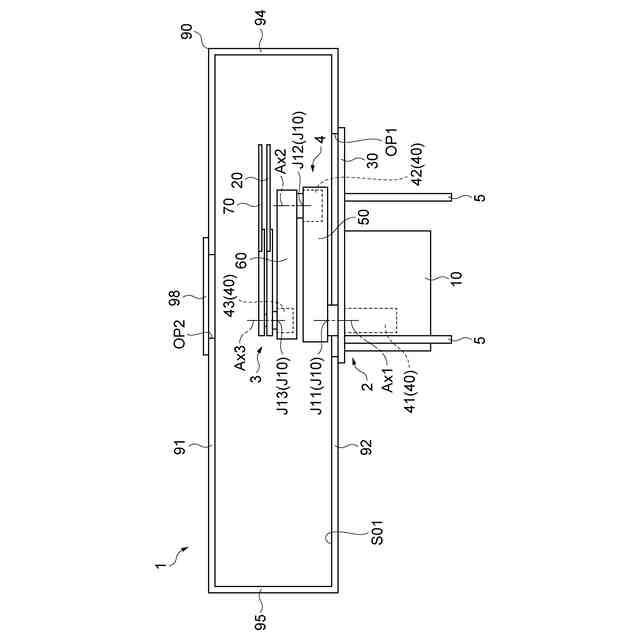
図1中のII-II線に沿った断面図である。
図2中のロボットの底面図である。
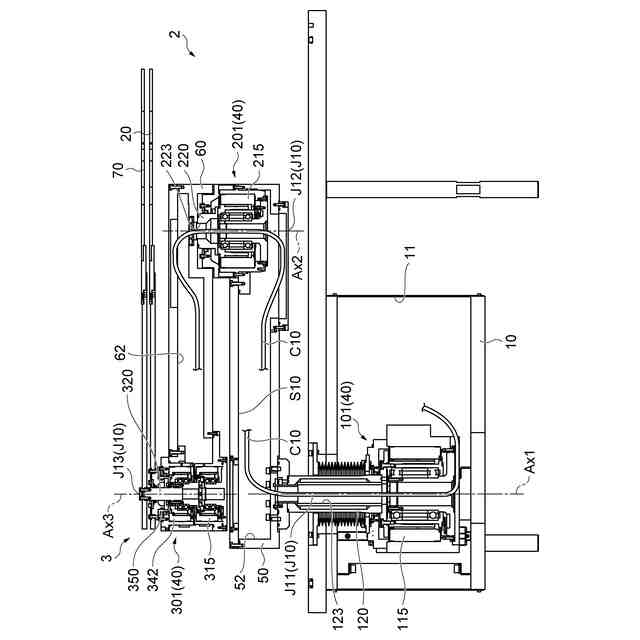
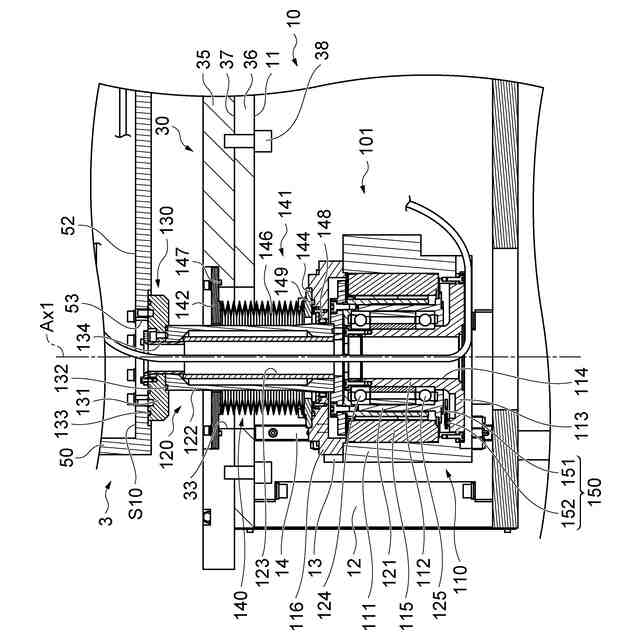
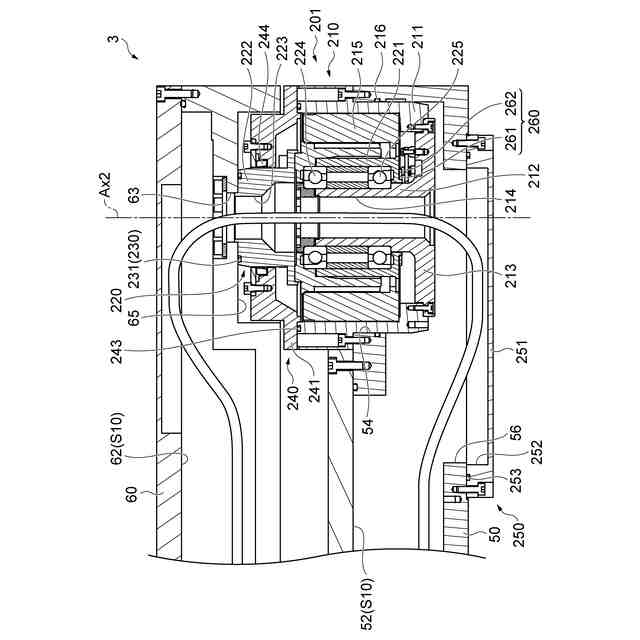
図1中のIV-IV線に沿った断面図である。
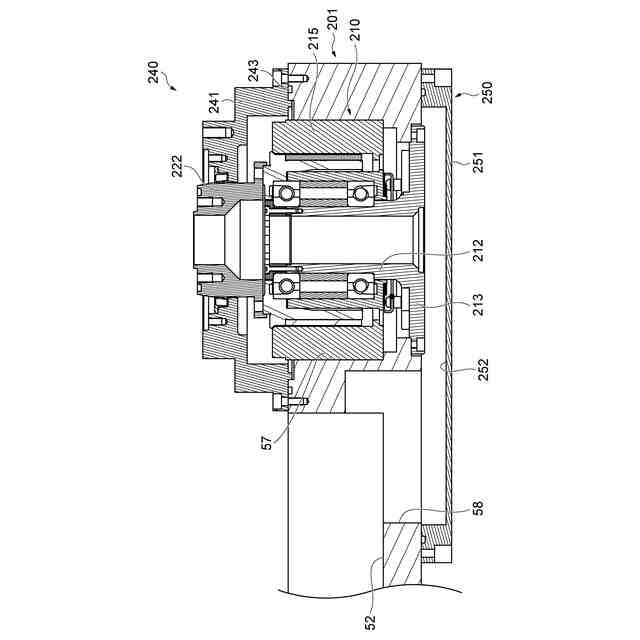
図4中の第1アームモータの拡大図である。
図4中の第2アームモータの拡大図である。
図4中のハンドモータの拡大図である。
ハンドモータの変形例を示す図である。
第2アームモータの変形例を示す図である。
ハンドモータの他の変形例を示す図である。
ハンドモータの更に他の変形例を示す図である。
チューブ及び空冷流路を例示する図である。
ケーブルの配線を例示する図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0009】
〔基板搬送装置〕
図1及び図2に示す基板搬送装置1は、基板Wが保管される1以上のステーションST10と、複数の処理モジュールPU10との間で基板Wを搬送する装置である。基板Wの例としては、半導体基板、ガラス基板、マスク基板、又はFPD(FlatPanelDisplay)基板等が挙げられる。基板搬送装置1は、チャンバ90と、ロボット2とを備える。チャンバ90は、長手方向D11と、長手方向D11に垂直な短手方向D12とを有する。長手方向D11と短手方向D12とが水平面に沿うように配置される。
【0010】
チャンバ90は、上下に並ぶ天板91と底板92とを有し、底板92と底板92との間の空間を包囲する周壁93を更に有する。以下、周壁93に包囲される空間を搬送空間S01という。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット及び基板搬送装置
1か月前
株式会社安川電機
ロボットシステム及びロボット制御方法
1か月前
株式会社安川電機
ロボット制御システム及び梱包資材の切断方法
1か月前
株式会社安川電機
制御システム、プラントシステム、コントローラ、及び制御方法
2日前
個人
腰袋
8日前
株式会社エビス
連結具
2か月前
株式会社マキタ
電動工具
16日前
株式会社マキタ
電動工具
1日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットリスト
16日前
日本車輌製造株式会社
締め付け工具
16日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットシステム
16日前
日本信号株式会社
作業機制御システム
1日前
CKD株式会社
吸着型搬送装置
1か月前
株式会社京阪エンジニアリング
脱着装置
2日前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
ジヤトコ株式会社
圧入装置
29日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社マキタ
集塵アタッチメント
1日前
株式会社スター精機
ワーク搬送装置
5日前
株式会社アマダ
磁気吸着装置
1か月前
モトコマ株式会社
寄せポンチホルダー
17日前
トヨタ自動車株式会社
制御装置及び制御方法
16日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ