TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024082876
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2022197056
出願日
2022-12-09
発明の名称
ハンド構造
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
15/10 20060101AFI20240613BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】動的な物体を制御可能なハンド構造を提供する。
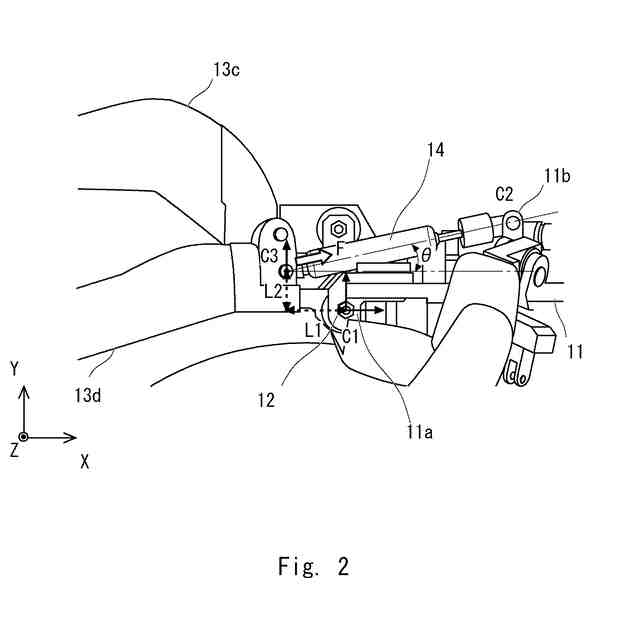
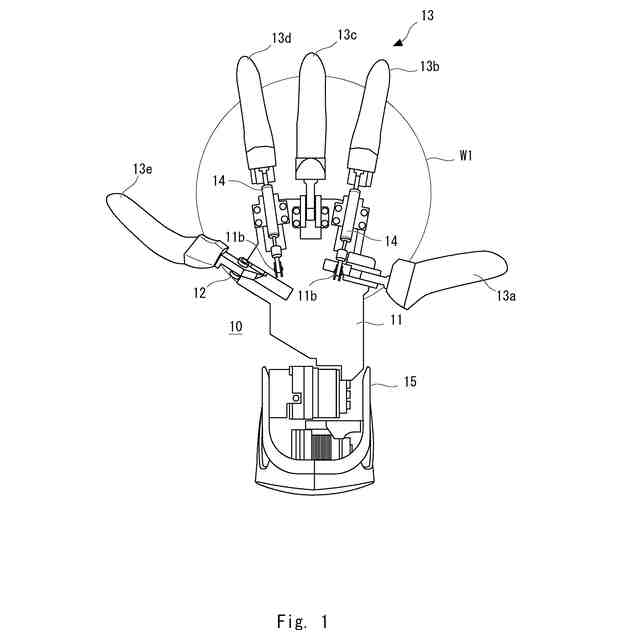
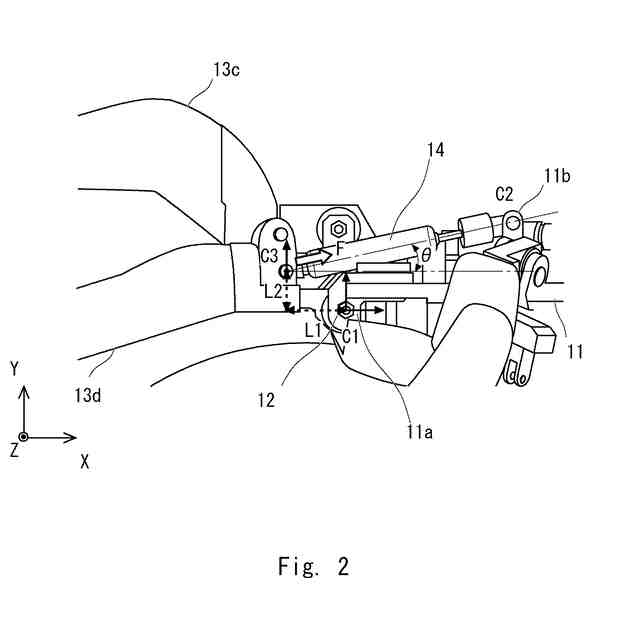
【解決手段】本開示の一形態に係るハンド10は、基部11と、基部11に設られた指関節部12と、指関節部12を中心として揺動可能な指部13と、基部11と指部13との間に連結され、動的な物体の衝突による指部13の揺動に応じて当該指部13に生じる回転トルクを緩和する緩衝器14とを有する。指部13は、1つの基部11に対して複数設けられており、緩衝器14は、複数の指部13の少なくとも1つと基部11との間に連結される。
【選択図】図2
特許請求の範囲
【請求項1】
基部と、
前記基部に設られた指関節部と、
前記指関節部を中心として揺動可能な指部と、
前記基部と前記指部との間に連結され、動的な物体の衝突による前記指部の揺動に応じて当該指部に生じる回転トルクを緩和する緩衝器と、
を有する、
ハンド構造。
続きを表示(約 480 文字)
【請求項2】
前記基部に接続された手首関節部と、
前記基部を前記手首関節部を中心として駆動する駆動部とをさらに備え、
前記駆動部は、前記指部に接触する前記物体が静止状態となった後に、前記指関節が剛となった状態において前記基部に加速度を与え、前記物体を打ち出す、
請求項1に記載のハンド構造。
【請求項3】
前記指部は、1つの前記基部に対して複数設けられており、
前記緩衝器は、複数の前記指部の少なくとも1つと前記基部との間に連結される、
請求項1に記載のハンド構造。
【請求項4】
前記基部に対して前記指部を駆動する駆動部をさらに備え、
複数の前記指部は、前記緩衝器が連結された指部と、前記緩衝器が連結されていない指部とを含み、
前記駆動部は、前記緩衝器が連結されていない前記指部を駆動して、前記物体を把持する、
請求項3に記載のハンド構造。
【請求項5】
前記指部の腹側に設けられた緩衝材をさらに備える、
請求項1に記載のハンド構造。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ハンド構造に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、人間の手を模倣したロボットハンドの研究開発がなされている。例えば、特許文献1には、手部及び腕部を有するロボットハンドが開示されている。手部は、人間の手首から先に該当する部分に対応する。腕部は、複数のモータで構成される駆動部を有し、手部の各可動部を駆動するための駆動力を発生する。このロボットハンドは、同軸上に配置された手首配置プーリー群と同軸上に配置された腕部プーリー群とが、歯車などで噛み合うことによって、駆動部が発生した駆動力を手部の各可動部に伝達している。
【先行技術文献】
【特許文献】
【0003】
特許第5482664号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットハンドの指、手、腕を用いて、動的な物体を制御することが考えられている。しかしながら、ロボットハンドは剛な構造であるため、動的な物体との衝突により破壊される場合がある。また、動的な物体がロボットハンドに衝突した瞬間に跳ね返ることもあり、ロボットハンドによって当該物体を制御することは難しい。一方、ロボットハンドを弾性体等の可撓性を有する材料で構成すると、物体に力を与えたり、制御したりすることが困難となる。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、動的な物体を制御可能なハンド構造を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るハンド構造は、基部と、前記基部に設られた指関節部と、前記指関節部を中心として揺動可能な指部と、前記基部と前記指部との間に連結され、動的な物体の衝突による前記指部の揺動に応じて当該指部に生じる回転トルクを緩和する緩衝器とを有する。
【発明の効果】
【0007】
本開示によれば、動的な物体を制御可能なハンド構造を提供することができる。
【図面の簡単な説明】
【0008】
実施形態に係るハンド構造を採用したロボットハンドの概略構成を示す図である。
図1のロボットハンドの一部を拡大した図である。
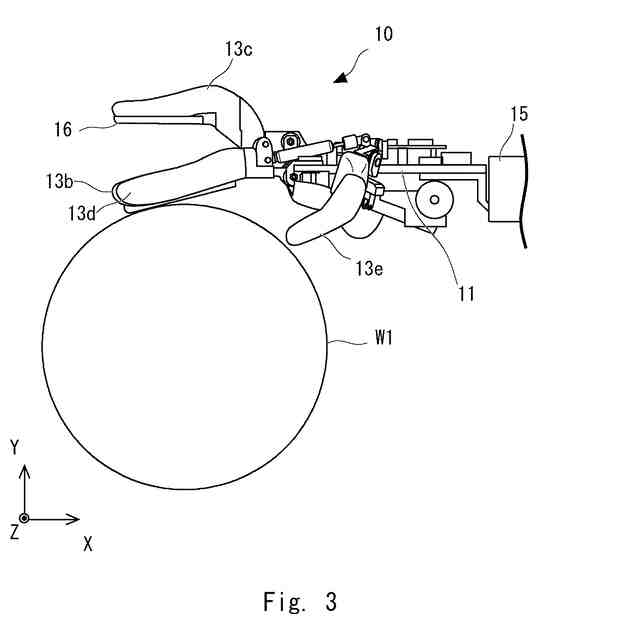
実施形態に係るロボットハンドによるボールの打ち出し動作を説明する図である。
実施形態に係るロボットハンドによるボールの打ち出し動作を説明する図である。
実施形態に係るロボットハンドによるボールの打ち出し動作を説明する図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明の実施形態について説明する。説明の明確化のため、以下の記載及び図面は、適宜、省略、及び簡略化がなされている。また、各図面において、同一の要素には同一の符号が付されており、必要に応じて重複説明は省略されている。
【0010】
実施形態は、ロボットハンド(以下、単に「ハンド」とする)に適用されるハンド構造に関する。なお、以下の説明において、「ハンド」とは人間型ロボットのアームの先端に装着される、人間の手に対応する部位を意味する。また、ハンドの「指」とは人間の手指に対応する部位を意味し、ハンドの「掌」とは人間の手掌に対応する部位を意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
3日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
11日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
制御装置
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットアーム
11日前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
3か月前
日本車輌製造株式会社
締め付け工具
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットリスト
11日前
学校法人立命館
ロボットハンド
2か月前
CKD株式会社
吸着型搬送装置
25日前
川崎重工業株式会社
ロボットシステム
11日前
長堀工業株式会社
締結装置
1か月前
株式会社アイエイアイ
グリッパー
2か月前
株式会社安川電機
ロボット
28日前
川崎重工業株式会社
塗装ロボット
1か月前
ジヤトコ株式会社
圧入装置
24日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
今日
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
電動作業機
3か月前
川崎重工業株式会社
ロボットシステム
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































