TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001072
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100427
出願日
2023-06-20
発明の名称
印刷システム
出願人
株式会社ミマキエンジニアリング
代理人
個人
主分類
B25J
13/00 20060101AFI20241225BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】媒体に印刷を行う印刷装置と、印刷前の媒体が配置される印刷前媒体配置部と、印刷後の媒体が配置される印刷後媒体配置部と、印刷前媒体配置部から印刷装置に媒体を搬送するとともに印刷装置から印刷後媒体配置部に媒体を搬送する搬送ロボットとを備える印刷システムにおいて、搬送ロボットが短い動作時間でも、印刷前媒体配置部から印刷装置に媒体を搬送することが可能であるとともに、印刷装置から印刷後媒体配置部に媒体を搬送することが可能な印刷システムを提供する。
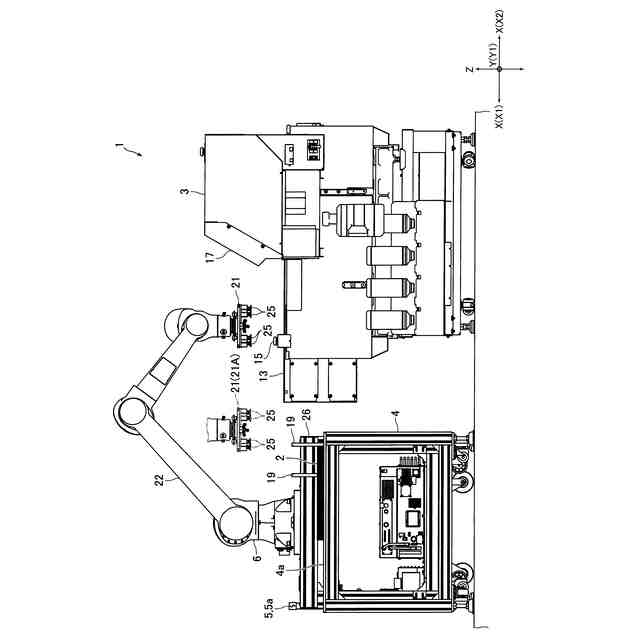
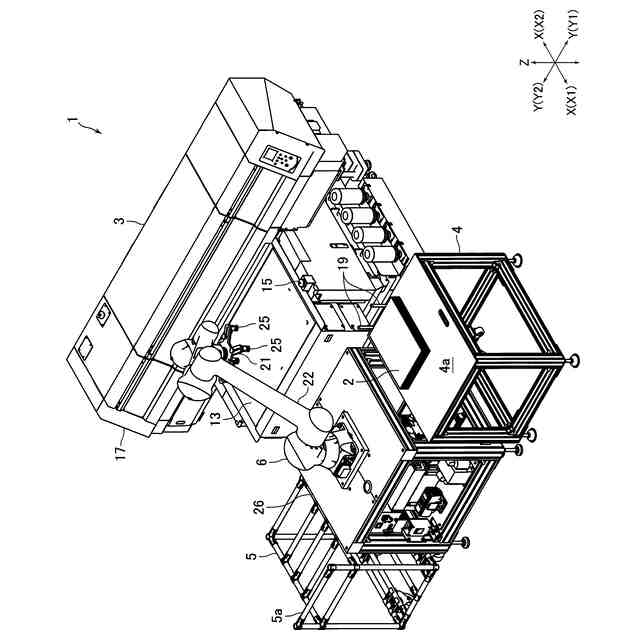
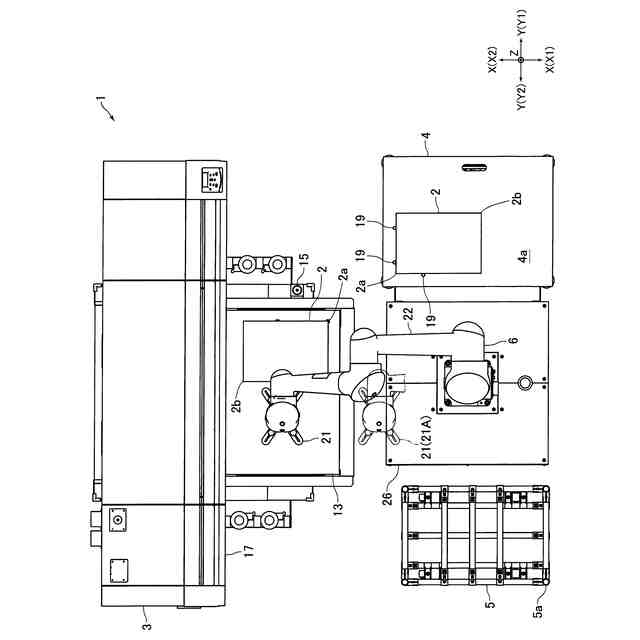
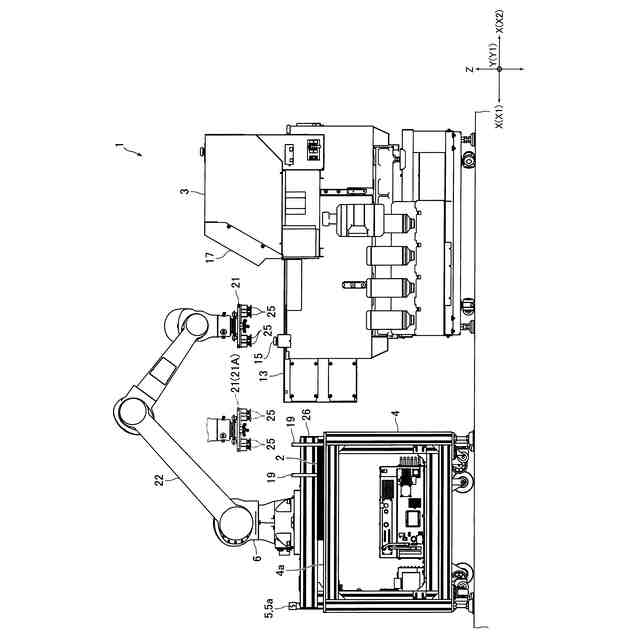
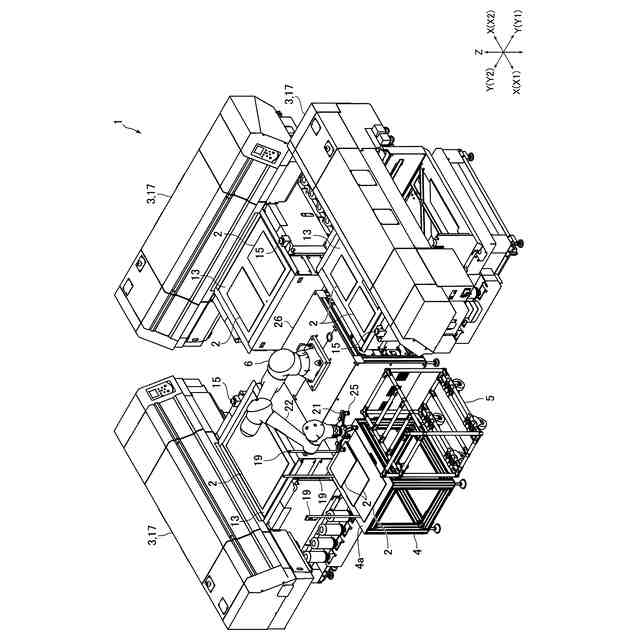
【解決手段】印刷システム1では、印刷装置3は、媒体2が載置されるテーブル13を備え、搬送ロボット6は、媒体2を保持するハンド21を備えている。搬送ロボット6が媒体2の搬送動作を開始するときのハンド21の位置である定位置21Aは、テーブル13の上面、印刷前媒体配置部4の上端および印刷後媒体配置部5の上端よりも高い位置になっている。
【選択図】図3
特許請求の範囲
【請求項1】
媒体に印刷を行う印刷装置と、印刷前の前記媒体が配置される印刷前媒体配置部と、印刷後の前記媒体が配置される印刷後媒体配置部と、前記印刷前媒体配置部から前記印刷装置に前記媒体を搬送するとともに前記印刷装置から前記印刷後媒体配置部に前記媒体を搬送する搬送ロボットとを備え、
前記印刷装置は、前記媒体が載置されるテーブルを備え、
前記搬送ロボットは、前記媒体を保持するハンドを備え、
前記搬送ロボットが前記媒体の搬送動作を開始するときの前記ハンドの位置である定位置は、前記テーブルの上面、前記印刷前媒体配置部の上端および前記印刷後媒体配置部の上端よりも高い位置であることを特徴とする印刷システム。
続きを表示(約 1,500 文字)
【請求項2】
前記印刷装置は、前記印刷装置を緊急停止させるための緊急停止ボタンを備え、
前記定位置は、前記緊急停止ボタンの上端よりも高い位置であることを特徴とする請求項1記載の印刷システム。
【請求項3】
上下方向から見たときに、前記定位置は、前記印刷装置、前記印刷前媒体配置部および前記印刷後媒体配置部とは異なる位置であることを特徴とする請求項1または2記載の印刷システム。
【請求項4】
上下方向から見たときに、前記定位置は、前記印刷装置、または、前記印刷前媒体配置部、あるいは、前記印刷後媒体配置部と重なっていることを特徴とする請求項1または2記載の印刷システム。
【請求項5】
任意の位置に配置された前記ハンドを前記定位置に戻す復帰動作を行うときに、前記ハンドは、前記定位置と同じ高さまで移動した後に水平方向に移動して前記定位置に戻ることを特徴とする請求項1または2記載の印刷システム。
【請求項6】
媒体に印刷を行う印刷装置と、印刷前の前記媒体が配置される印刷前媒体配置部と、印刷後の前記媒体が配置される印刷後媒体配置部と、前記印刷前媒体配置部から前記印刷装置に前記媒体を搬送するとともに前記印刷装置から前記印刷後媒体配置部に前記媒体を搬送する搬送ロボットとを備え、
前記印刷装置は、前記媒体が載置されるテーブルを備え、
前記搬送ロボットは、前記媒体を保持するハンドを備え、
前記搬送ロボットが前記媒体の搬送動作を開始するときの前記ハンドの位置である定位置は、前記テーブルの上面、および、前記印刷前媒体配置部の上端の少なくともいずれか一方よりも低い位置であることを特徴とする印刷システム。
【請求項7】
媒体に印刷を行う印刷装置と、印刷前の前記媒体が配置される印刷前媒体配置部と、印刷後の前記媒体が配置される印刷後媒体配置部と、前記印刷前媒体配置部から前記印刷装置に前記媒体を搬送するとともに前記印刷装置から前記印刷後媒体配置部に前記媒体を搬送する搬送ロボットとを備え、
前記印刷装置は、前記媒体が載置されるテーブルを備え、
前記搬送ロボットは、前記媒体に接触して前記媒体を押すハンドを備え、
前記搬送ロボットが前記媒体の搬送動作を開始するときの前記ハンドの位置である定位置は、上下方向において、前記テーブルの上面、または、前記印刷前媒体配置部の上端と同じ位置であることを特徴とする印刷システム。
【請求項8】
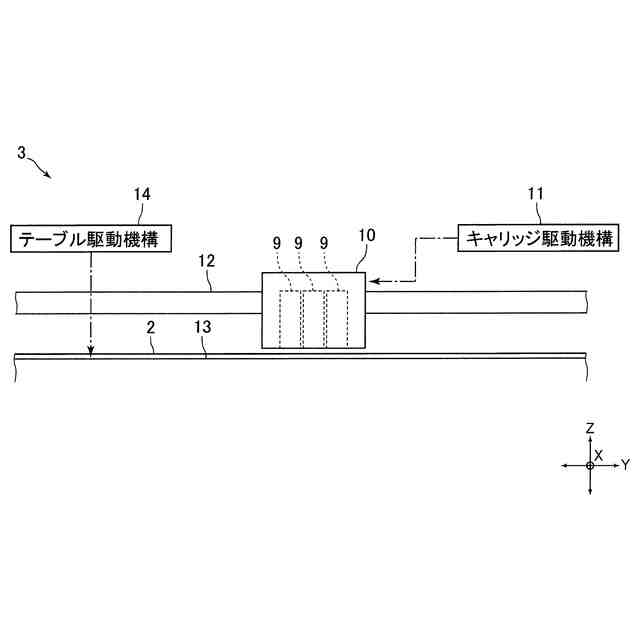
前記印刷装置は、インクを吐出するインクジェットヘッドと、前記インクジェットヘッドが搭載されるキャリッジと、前記キャリッジを主走査方向に移動させるキャリッジ駆動機構とを備えるインクジェットプリンタであり、
上下方向と主走査方向とに直交する副走査方向から見たときに、前記テーブルは、前記印刷前媒体配置部と前記印刷後媒体配置部との間に配置されていることを特徴とする請求項1、2、6または7のいずれかに記載の印刷システム。
【請求項9】
前記印刷装置は、インクを吐出するインクジェットヘッドと、前記インクジェットヘッドが搭載されるキャリッジと、前記キャリッジを主走査方向に移動させるキャリッジ駆動機構とを備えるインクジェットプリンタであり、
前記印刷前媒体配置部および前記印刷後媒体配置部は、前記定位置に配置される前記ハンドよりも主走査方向の一方側に配置されていることを特徴とする請求項1、2、6または7のいずれかに記載の印刷システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、媒体に印刷を行う印刷装置と媒体を搬送する搬送ロボットとを備える印刷システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
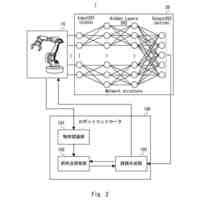
従来、半導体基板に対して印刷を行う印刷システムが知られている(たとえば、特許文献1参照)。特許文献1に記載の印刷システムは、半導体基板に液滴を吐出して印刷を行うインクジェットプリンタ(塗布部)と、印刷システムにおいて半導体基板を搬送する搬送ロボット(搬送部)とを備えている。搬送ロボットは、スカラー型のロボットであり、2個の腕部からアームと、アームの先端側に取り付けられるハンド(把持部)とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2012-183595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の印刷システムでは、印刷システムの処理能力を高めるために、搬送ロボットは、短い動作時間でも所定の位置から所定の位置に半導体基板を搬送できることが好ましい。
【0005】
そこで、本発明の課題は、媒体に印刷を行う印刷装置と、印刷前の媒体が配置される印刷前媒体配置部と、印刷後の媒体が配置される印刷後媒体配置部と、印刷前媒体配置部から印刷装置に媒体を搬送するとともに印刷装置から印刷後媒体配置部に媒体を搬送する搬送ロボットとを備える印刷システムにおいて、搬送ロボットが短い動作時間でも、印刷前媒体配置部から印刷装置に媒体を搬送することが可能であるとともに、印刷装置から印刷後媒体配置部に媒体を搬送することが可能な印刷システムを提供することにある。
【課題を解決するための手段】
【0006】
上記の課題を解決するため、本発明の印刷システムは、媒体に印刷を行う印刷装置と、印刷前の媒体が配置される印刷前媒体配置部と、印刷後の媒体が配置される印刷後媒体配置部と、印刷前媒体配置部から印刷装置に媒体を搬送するとともに印刷装置から印刷後媒体配置部に媒体を搬送する搬送ロボットとを備え、印刷装置は、媒体が載置されるテーブルを備え、搬送ロボットは、媒体を保持するハンドを備え、搬送ロボットが媒体の搬送動作を開始するときのハンドの位置である定位置は、テーブルの上面、印刷前媒体配置部の上端および印刷後媒体配置部の上端よりも高い位置であることを特徴とする。
【0007】
本発明の印刷システムでは、搬送ロボットが媒体の搬送動作を開始するときのハンドの位置である定位置は、テーブルの上面、印刷前媒体配置部の上端および印刷後媒体配置部の上端よりも高い位置である。そのため、本発明では、印刷前媒体配置部に配置される媒体やテーブルに載置される媒体にハンドが上側からアクセスする場合、定位置に配置されるハンドが印刷前媒体配置部やテーブルにおいて媒体の保持を開始するまでの時間を短縮することが可能になる。したがって、本発明では、印刷前媒体配置部やテーブルに配置される媒体にハンドが上側からアクセスする場合、搬送ロボットは、短い動作時間でも印刷前媒体配置部から印刷装置に媒体を搬送することが可能になるとともに、印刷装置から印刷後媒体配置部に媒体を搬送することが可能になる。
【0008】
また、本発明では、ハンドの定位置が、テーブルの上面、印刷前媒体配置部の上端および印刷後媒体配置部の上端よりも高い位置であるため、定位置に配置されているハンドは、テーブル、印刷前媒体配置部および印刷後媒体配置部におけるオペレータの作業の妨げになりにくくなる。したがって、本発明では、搬送ロボットが停止しているときにハンドを定位置に配置しておくことで、媒体を搬送する搬送ロボットが設置されていても、搬送ロボットに起因するオペレータの作業性の低下を抑制することが可能になる。
【0009】
本発明において、印刷装置は、印刷装置を緊急停止させるための緊急停止ボタンを備え、定位置は、緊急停止ボタンの上端よりも高い位置であることが好ましい。このように構成すると、定位置に配置されているハンドは、印刷装置の緊急停止ボタンをオペレータが押す際の妨げになりにくくなる。したがって、搬送ロボットが停止しているときにハンドを定位置に配置しておくことで、媒体を搬送する搬送ロボットが設置されていても、オペレータは、印刷装置の緊急停止ボタンを押しやすくなる。
【0010】
本発明において、上下方向から見たときに、定位置は、印刷装置、印刷前媒体配置部および印刷後媒体配置部とは異なる位置であることが好ましい。このように構成すると、定位置に配置されているハンドは、テーブル、印刷前媒体配置部および印刷後媒体配置部におけるオペレータの作業の妨げによりなりにくくなる。したがって、搬送ロボットが停止しているときにハンドを定位置に配置しておくことで、媒体を搬送する搬送ロボットが設置されていても、搬送ロボットに起因するオペレータの作業性の低下を効果的に抑制することが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
10日前
株式会社マキタ
電動工具
3日前
株式会社マキタ
電動工具
18日前
川崎重工業株式会社
ロボットアーム
18日前
川崎重工業株式会社
ロボットリスト
18日前
川崎重工業株式会社
ロボットアーム
18日前
日本車輌製造株式会社
締め付け工具
18日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
18日前
日本信号株式会社
作業機制御システム
3日前
株式会社京阪エンジニアリング
脱着装置
4日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社マキタ
集塵アタッチメント
3日前
株式会社スター精機
ワーク搬送装置
7日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
10日前
モトコマ株式会社
寄せポンチホルダー
19日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
18日前
有限会社松尾エンジニアリング
連結部材
19日前
株式会社DailyColor
ロボットハンド
19日前
個人
ターンバックル用工具
25日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
24日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
10日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
往復動工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ