TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024145777
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058270
出願日
2023-03-31
発明の名称
ロボットチャック
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20241004BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数種類のロボットチャックの交換を行うことなく、形状や大きさが異なるワークをそれぞれ把持することができるロボットチャックを提供すること。
【解決手段】本開示に係るロボットチャック1は、アクチュエータと、アクチュエータにより開閉され第1ワークW1を挟持可能な一対の第1クランプハンド10a,10bと、一対の第1クランプハンド10a,10bのそれぞれに着脱可能に連結され、アクチュエータにより開閉され第1ワークW1と形状が異なる第2ワークW2を挟持可能な一対の第2クランプハンド20a,20bと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
アクチュエータと、
前記アクチュエータにより開閉され第1ワークを挟持可能な一対の第1クランプハンドと、
前記一対の第1クランプハンドのそれぞれに着脱可能に連結され、前記アクチュエータにより開閉され前記第1ワークと形状が異なる第2ワークを挟持可能な一対の第2クランプハンドと、を備える、
ロボットチャック。
発明の詳細な説明
【技術分野】
【0001】
本開示はロボットチャックに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、寸法の大きく異なるワークを把持することができるロボットハンドが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-049615号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数種類の部品を把持するための市販の汎用ロボットチャックは、ボルトと納入箱といった極端に形状や大きさが異なるワークを把持することが難しい。他方、複数種類のロボットチャックを準備し、ワークの形状や大きさに応じて毎回交換して使用するとなると、コストが高くなると共に、ロボットチャックの交換に手間が掛かるという問題があった。
【0005】
本開示は、上記の問題を鑑みてなされたものであり、複数種類のロボットチャックの交換を行うことなく、形状や大きさが異なるワークをそれぞれ把持することができるロボットチャックを提供するものである。
【課題を解決するための手段】
【0006】
本開示に係るロボットチャックは、アクチュエータと、アクチュエータにより開閉され第1ワークを挟持可能な一対の第1クランプハンドと、一対の第1クランプハンドのそれぞれに着脱可能に連結され、アクチュエータにより開閉され第1ワークと形状が異なる第2ワークを挟持可能な一対の第2クランプハンドと、を備える。
【0007】
本開示に係るロボットチャックでは、一対の第1クランプハンドのそれぞれに着脱可能に連結され、アクチュエータにより開閉され第1ワークと形状が異なる第2ワークを挟持可能な一対の第2クランプハンドを備える。よって、複数種類のロボットチャックの交換を行うことなく、形状や大きさが異なるワークをそれぞれ把持することができるロボットチャックを提供できる。
【発明の効果】
【0008】
本開示により、複数種類のロボットチャックの交換を行うことなく、形状や大きさが異なるワークをそれぞれ把持することができるロボットチャックを提供できる。
【図面の簡単な説明】
【0009】
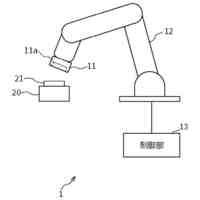
実施の形態に係るロボットチャックを示す斜視図である。
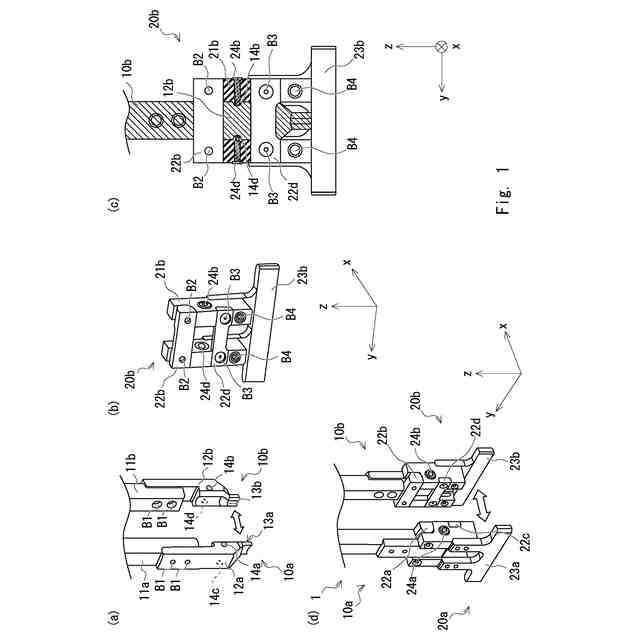
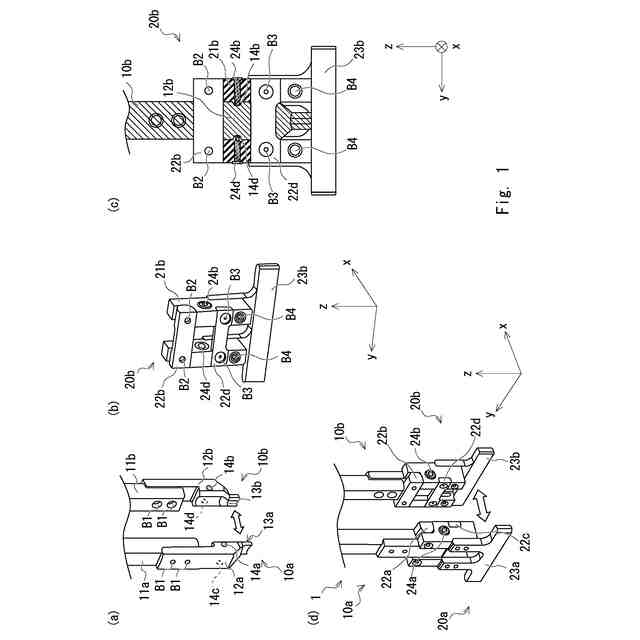
実施の形態に係るロボットチャックが備える一対の第1クランプハンドと一対の第2クランプハンドを連結する一連の流れを示す斜視図である。
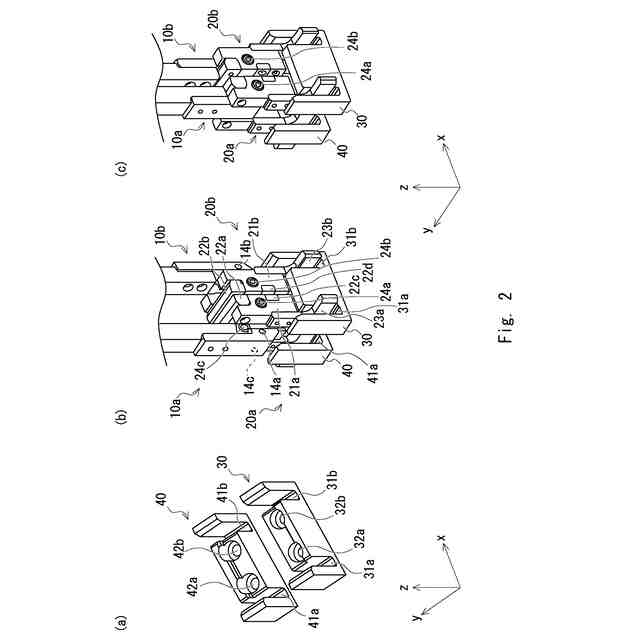
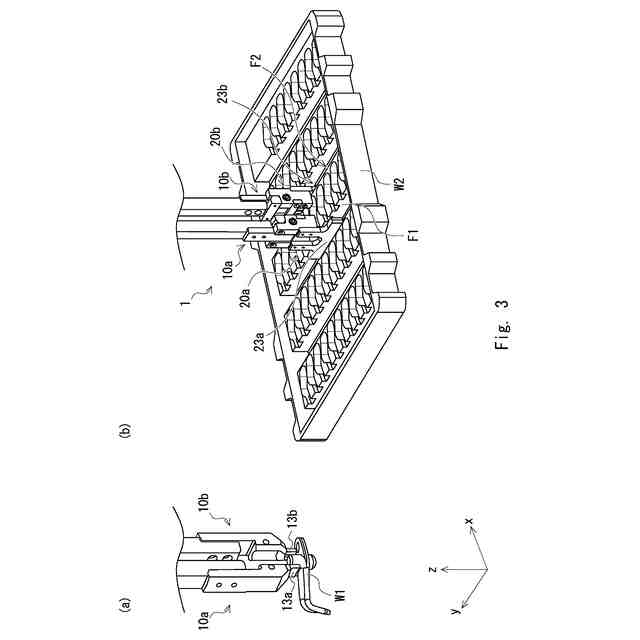
実施の形態に係るロボットチャックが第1ワークと第2ワークをそれぞれ挟持した例を示す斜視図である。
【発明を実施するための形態】
【0010】
以下、本開示の具体的な実施の形態について、図面を参照しながら詳細に説明する。
なお、図に示した右手系xyz座標は、構成要素の位置関係を説明するための便宜的なものである。特に言及のない限り、z軸プラス向きが鉛直上向きである。また、xy平面が水平面である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
28日前
株式会社アイセイ
搬送装置
1日前
国立大学法人金沢大学
ロボット
7日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
21日前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットリスト
1か月前
株式会社ケー・エフ・シー
締結構造
11日前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
21日前
川崎重工業株式会社
ロボットシステム
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
22日前
アピュアン株式会社
衝撃工具
2日前
株式会社スター精機
ワーク搬送装置
25日前
トヨタ自動車株式会社
把持装置、把持方法
15日前
株式会社マキタ
集塵アタッチメント
21日前
川崎重工業株式会社
ロボットシステム
28日前
モトコマ株式会社
寄せポンチホルダー
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
1か月前
株式会社コスメック
把持装置
8日前
株式会社DailyColor
ロボットハンド
1か月前
株式会社ダイヘン
ロボット制御システム
11日前
国立大学法人 東京大学
ロボットアーム
8日前
個人
ターンバックル用工具
1か月前
有限会社松尾エンジニアリング
連結部材
1か月前
株式会社不二越
ロボットビジョンシステム
14日前
原利興工業有限公司
工具用スリーブ
7日前
株式会社SHIN‐JIGEN
上肢アシスト装置
1か月前
株式会社マキタ
作業機
7日前
株式会社マキタ
電動工具
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ