TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024113575
公報種別
公開特許公報(A)
公開日
2024-08-22
出願番号
2023018657
出願日
2023-02-09
発明の名称
協働システム
出願人
国立大学法人佐賀大学
代理人
個人
主分類
B25J
13/08 20060101AFI20240815BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者の判断とロボットの判断とで相互に補い合いながら協働することで効率よく作業を実行することができる協働システムを提供する。
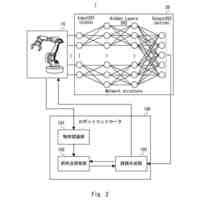
【解決手段】カメラで撮像された撮像情報に基づいて作業対象の状態を解析する画像解析部と、画像解析部の解析結果から、前記作業対象の状態が予め設定されている目的に合致する状態に近づくような最適動作を演算する最適動作演算部と、作業者の体の一部に装着され、最適動作に従って作業者の体の一部である装着部位の動きを制御して駆動し、又は装着部位の動きに合わせて動作するロボットと、ロボットの駆動状態が最適動作に従った駆動状態に一致するかどうかを判定する駆動判定部とを備え、駆動判定部が、ロボットの駆動状態と最適動作に従った駆動状態とが一致しないと判定した場合に、画像解析部が作業対象の最新の状態を解析し、最適動作演算部が最新の解析結果に基づいて最適動作を再演算する。
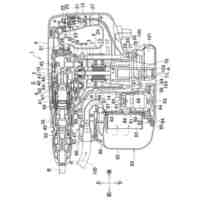
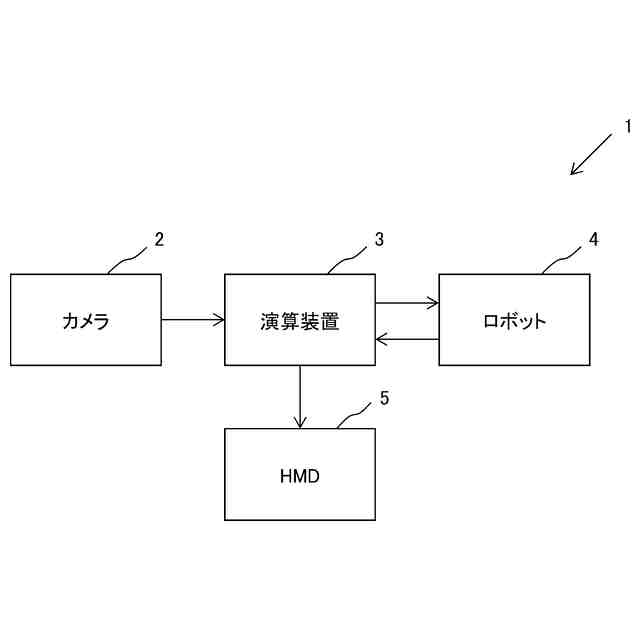
【選択図】図1
特許請求の範囲
【請求項1】
作業対象を撮像するカメラと、
カメラで撮像された撮像情報に基づいて作業対象の状態を解析する撮像情報解析手段と、
前記解析手段の解析結果から、前記作業対象の状態が予め設定されている目的に合致する状態に近づくような最適動作を演算する最適動作演算手段と、
作業者の体の一部に装着され、前記最適動作にしたがって前記作業者の体の一部である装着部位の動きを制御して駆動し、又は前記装着部位の動きに合わせて動作するロボットと、
前記ロボットの駆動状態に関する情報を取得し、当該駆動状態が前記最適動作にしたがった駆動状態に一致するかどうかを判定する駆動判定手段とを備え、
前記駆動判定手段が、前記ロボットの駆動状態と前記最適動作にしたがった駆動状態とが一致しないと判定した場合に、前記撮像情報解析手段が前記作業対象の最新の状態を解析し、前記最適動作演算手段が最新の解析結果に基づいて前記最適動作を再演算することを特徴とする協働システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の協働システムにおいて、
前記ロボットは、前記装着部位からの負荷を受けた場合に当該負荷にしたがった動作を行い、前記装着部位からの負荷がない場合に前記最適動作にしたがった駆動を行うことを特徴とする協働システム。
【請求項3】
請求項1又は2に記載の協働システムにおいて、
前記解析手段の解析結果に基づいて、前記目的に合致させるための適合度合を示す前記作業対象の評価値を算出する作業対象評価手段と、
前記ロボットを前記最適動作とは異なるように動作させるのに必要となる前記装着部位から前記ロボットに対する負荷の大きさを調整する負荷調整手段とを備え、
当該負荷調整手段が、前記作業対象評価手段が算出した評価値に応じて前記負荷の大きさを調整することを特徴とする協働システム。
【請求項4】
請求項3に記載の協働システムにおいて、
前記作業対象に対して作業を実行する作業者の状態に関する作業者情報を取得する作業者情報取得手段と、
前記作業者情報に基づいて、前記作業対象を前記目的に合致させるための作業効率についての前記作業者の評価値を算出する作業者評価手段とを備え、
前記負荷調整手段が、前記作業対象評価手段が算出した評価値、及び前記作業者評価手段が算出した評価値に応じて前記負荷の大きさを調整することを特徴とする協働システム。
【請求項5】
請求項3に記載の協働システムにおいて、
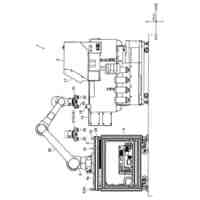
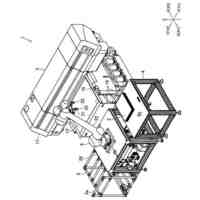
前記作業が複数種類の形状を有するパッケージ対象を所定の空間にパッケージングする作業であり、前記ロボットが前記作業者の腕に装着されるマニピュレータであり、
前記作業対象評価手段が、前記作業対象に含まれる残りのパッケージ対象の全体個数に対する各形状の個数の割合に応じて前記評価値を算出することを特徴とする協働システム。
【請求項6】
請求項3に記載の協働システムにおいて、
前記作業がパッケージ対象を所定の空間にパッケージングする作業であり、前記ロボットが前記作業者の腕に装着されるマニピュレータであり、
前記作業対象評価手段が、前記所定の空間の形状に応じて前記評価値を算出することを特徴とする協働システム。
【請求項7】
請求項4に記載の協働システムにおいて、
前記作業がパッケージ対象を所定の空間にパッケージングする作業であり、前記ロボットが前記作業者の腕に装着されるマニピュレータであり、
前記作業者評価手段が、前記作業者が連続して作業している作業時間、及び/又は作業開始から作業終了までの積算された作業時間に応じて前記評価値を算出することを特徴とする協働システム。
【請求項8】
請求項4に記載の協働システムにおいて、
前記作業がパッケージ対象を所定の空間にパッケージングする作業であり、前記ロボットが前記作業者の腕に装着されるマニピュレータであり、
前記作業者評価手段が、前記ロボットが前記最適動作とは異なる駆動を行う場合における当該ロボットの駆動動作速度の経時的な変化に応じて前記評価値を算出することを特徴とする協働システム。
【請求項9】
請求項1又は2に記載の協働システムにおいて、
前記解析手段の解析結果に基づいて、前記目的に合致させるための適合度合を示す前記作業対象の評価値を算出する作業対象評価手段と、
前記ロボットが前記最適動作にしたがって駆動する場合の駆動速度を調整する速度調整手段を備え、
前記速度調整手段が、前記作業対象評価手段が算出した評価値に応じて前記駆動速度を調整することを特徴とする協働システム。
【請求項10】
請求項1又は2に記載の協働システムにおいて、
前記最適動作演算手段が演算した最適動作に関する情報が含まれる仮想画像を生成する仮想画像生成手段と、
作業者の頭部に装着され、現実映像と前記仮想画像とを重ねて表示するヘッドマウントディスプレイとを備えることを特徴とする協働システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業者とロボットとが適正に協働して目的とする作業を実行する協働システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
人間と機械との協働は、作業の精度・効率の向上および省力化に必要不可欠な要素である。両者が同じ環境で作業する協働ロボットやパワーアシスト等の研究が、これまで積極的かつ精力的に行われてきた。しかしながら、これらのシステムを注意深く観察すると作業の主導権を握っているのは人間か機械かのいずれか一方であり、人間同士の協働作業のように主導権を交換し合ったり、短所を補い合ったりという段階へは未だ至っていない。今後、我が国における労働人口減少に伴う社会において作業者のスキルや経験不足を補うためには協働の相乗効果を高めることが喫緊かつ克服すべき重要課題であり、本課題の解決にて大きなブレークスルーが期待される。
【0003】
人間と機械とが協働する技術について、例えば特許文献1~3に示す技術が開示されている。特許文献1には、車両の前方を撮像するカメラからの画像情報に基づき走行中の車線と自車両との位置関係を検出し、その検出結果に基づいてレーンに沿った走行を実現するレーンキープ制御中に、ドライバによる介入動作(ドライバオーバーライド)が行われると介入動作による偏差を打ち消そうとトルクを発生することが開示されている。
【0004】
特許文献2には、脳卒中等の脳障害による麻痺腕の動作をアシストするリハビリ装置であって、健常腕が麻痺腕をアシストするアシスト動作を検出する検出部と、麻痺腕に屈伸動作を行わせるアシスト部と、検出部によるアシスト動作の検出によって、アシスト部の動作タイミング、動作速度、又は屈曲負荷若しくは伸展負荷を調整する調整部と、調整部によって調整された動作タイミング、動作速度、又は屈曲負荷若しくは伸展負荷によってアシスト部を動作させる制御部とを備えるリハビリ装置が開示されている。また、筋電センサで検出した筋電位又は筋電センサで検出した筋電位に基づき計算された筋シナジと、麻痺腕が動く映像とを重ね合わせて、頭部装着ディスプレイを通じて表示することが開示されている。
【0005】
特許文献3には、検査対象に付着した異物を検査する異物検査システムにおいて、カメラによって撮像された検査対象領域における異物や異物が付着している色付けされた領域を仮想画像として現実画像に重ねた画像をヘッドマウントディスプレイ装置に表示し、モーションキャプチャ等により作業者の動きを検知して、清掃エリアにおける清掃作業の進捗状態を着色で示すことが開示されている。
【先行技術文献】
【特許文献】
【0006】
特許第6273706号公報
特許第6296494号公報
特開2021-174785号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1~3に開示される技術では、人間と機械とで適正なタイミングで主導権を交換し合ったり、必要な状況に応じて短所を補い合ったりといったことまで十分に実現するのが難しい。特に、現時点においては、パッケージングや組み立てといった複雑な作業を行う場合に、人間と機械とが協働して作業効率を上げること(例えば、作業精度を上げる、作業スピードを上げる等)が極めて困難が状況であると言える。
【0008】
本発明は、上記課題を解決するためになされたものであり、作業者の判断とロボットの判断とで相互に補い合いながら、それぞれが協働することで効率よく作業を実行することができる協働システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る協働システムは、作業対象を撮像するカメラと、カメラで撮像された撮像情報に基づいて作業対象の状態を解析する撮像情報解析手段と、前記解析手段の解析結果から、前記作業対象の状態が予め設定されている目的に合致する状態(以下、作業達成状態という)に近づくような最適動作を演算する最適動作演算手段と、作業者の体の一部に装着され、前記最適動作にしたがって前記作業者の体の一部である装着部位の動きを制御して駆動し、又は前記装着部位の動きに合わせて駆動するロボットと、前記ロボットの駆動状態に関する情報を取得し、当該駆動状態が前記最適動作にしたがった駆動状態に一致するかどうかを判定する駆動判定手段とを備え、前記駆動判定手段が、前記ロボットの駆動状態と前記最適動作にしたがった駆動状態とが一致しないと判定した場合に、前記撮像情報解析手段が前記作業対象の最新の状態を解析し、前記最適動作演算手段が最新の解析結果に基づいて前記最適動作を再演算するものである。
【0010】
このように、本発明に係る協働システムにおいては、作業対象を撮像し、撮像された撮像情報に基づいて作業対象の状態を解析し、解析結果から作業対象の状態が予め設定されている目的に合致する状態に近づくような最適動作を演算し、作業者の体の一部に装着され、前記最適動作にしたがって前記作業者の体の一部である装着部位の動きを制御して駆動し、又は前記装着部位の動きに合わせて駆動するロボットの駆動状態に関する情報を取得し、当該駆動状態が前記最適動作にしたがった駆動状態に一致するかどうかを判定し、前記ロボットの駆動状態と前記最適動作にしたがった駆動状態とが一致しないと判定した場合に、前記作業対象の最新の状態を解析し、当該最新の解析結果に基づいて前記最適動作を再演算するため、ロボットによる最適動作の作業を実現しつつ、必要に応じて作業者の判断を優先することでロボットと作業者との主導権の交換を適正なタイミングで行うことを可能にしつつ、作業状況に応じて短所を補い合った協働作業を実現することができるという効果を奏する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人佐賀大学
リベット塗膜剥離方法
1か月前
個人
腰袋
4日前
株式会社エビス
連結具
2か月前
株式会社マキタ
電動工具
12日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットアーム
12日前
日本車輌製造株式会社
締め付け工具
12日前
川崎重工業株式会社
ロボットアーム
12日前
川崎重工業株式会社
ロボットリスト
12日前
CKD株式会社
吸着型搬送装置
26日前
川崎重工業株式会社
ロボットシステム
12日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
29日前
ジヤトコ株式会社
圧入装置
25日前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
29日前
株式会社安川電機
ロボット
29日前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
1日前
トヨタ自動車株式会社
制御装置及び制御方法
12日前
モトコマ株式会社
寄せポンチホルダー
13日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
4日前
工機ホールディングス株式会社
作業機
2か月前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
工機ホールディングス株式会社
電気機器
2か月前
株式会社DailyColor
ロボットハンド
13日前
個人
ターンバックル用工具
19日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
有限会社松尾エンジニアリング
連結部材
13日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
18日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ