TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024118007
公報種別
公開特許公報(A)
公開日
2024-08-30
出願番号
2023024153
出願日
2023-02-20
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20240823BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】緩衝部材の破片が飛散することを抑制できるロボットを提供する。
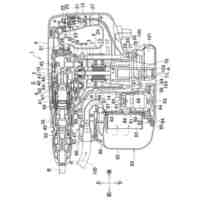
【解決手段】このロボット100は、第1アーム部22と、第1アーム部22に対して相対的に移動する回転台21と、第1アーム部22の一部である突出部22aと回転台21の一部である突出部21bとを含み第1アーム部22と回転台21との相対的な移動を規制する第1規制部51と、第1アーム部22の突出部22aと、回転台21の突出部21bとの間に配置される第2緩衝部材62と、突出部22aに配置され、第2緩衝部材62を覆うカバー部材72と、を備える。
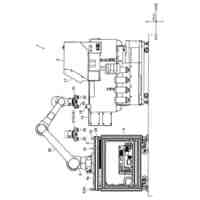
【選択図】図1
特許請求の範囲
【請求項1】
第1部材と、
前記第1部材に対して相対的に移動する第2部材と、
前記第1部材の一部である第1部分と前記第2部材の一部である第2部分とを含み、前記第1部材と前記第2部材との相対的な移動を規制する規制部と、
前記第1部材と前記第2部材とのうちの少なくとも一方に、かつ、前記第1部分と前記第2部分との間に配置される緩衝部材と、
前記第1部材と前記第2部材とのうちの少なくとも一方に配置され、前記緩衝部材を覆うカバー部材と、を備える、ロボット。
続きを表示(約 930 文字)
【請求項2】
前記カバー部材は、前記第1部分と前記第2部分とが接近した際に、前記緩衝部材のうちの前記第1部分と前記第2部分とのうちの少なくとも一方に対向する部分以外の部分を取り囲むように覆う、請求項1に記載のロボット。
【請求項3】
前記緩衝部材は、
前記規制部に接触する第1面と、
前記第1部材と前記第2部材との相対的な移動方向において、前記第1面とは反対側に配置される第2面と、
前記第1面と前記第2面とを接続する第3面と、を含み、
前記カバー部材は、前記緩衝部材の前記第3面を取り囲むように覆う取り囲み部分を含む、請求項2に記載のロボット。
【請求項4】
前記取り囲み部分は、前記緩衝部材の前記第3面の全周を取り囲むように覆う、請求項3に記載のロボット。
【請求項5】
前記取り囲み部分は、前記第1部材と前記第2部材との相対的な移動方向において、前記緩衝部材の前記第3面の全ては覆わずに、前記緩衝部材の前記第3面の半分以上を覆う、請求項4に記載のロボット。
【請求項6】
前記カバー部材は、前記第1部材と前記第2部材とのうちの少なくとも一方に取り付けられる取付部を含む、請求項1に記載のロボット。
【請求項7】
前記緩衝部材は、ゴム部材または樹脂部材を含み、
前記カバー部材は、板金部材を含む、請求項1に記載のロボット。
【請求項8】
前記カバー部材は、折り曲げられた板金部材である、請求項7に記載のロボット。
【請求項9】
前記緩衝部材は、前記第1部分と前記第2部分とのうちの一方に配置され、
前記カバー部材は、前記緩衝部材を覆うように、前記第1部材と前記第2部材とのうちの一方に配置されている、請求項1に記載のロボット。
【請求項10】
前記緩衝部材は、前記第1部分と前記第2部分とのうちの一方に配置され、
前記カバー部材は、前記第1部分と前記第2部分とのうちの他方に配置されている、請求項1に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、緩衝部材を備えるロボットが知られている。特許文献1では、基台と、第1アーム部と、第2アーム部と、を備えるロボットが開示されている。第1アーム部は、基台に対して回転する。第1アーム部と第2アーム部とは、相対的に回転する。第1アーム部には、第1アーム部の回転軸から離間する方向に突出する突出部が形成されている。突出部には、基台に対する第1アーム部の回転を静止させるための制動力を補助するための弾性部材が配置されている。弾性部材は、ゴムである。基台には、規制部が配置されている。規制部は、第1アーム部の回転軸から離間する方向に突出している。そして、第1アーム部が回転することにより、第1アーム部の突出部と、基台の規制部との間に弾性部材が挟み込まれる。
【先行技術文献】
【特許文献】
【0003】
特開2019-76975号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、弾性部材がゴムであるため、第1アーム部が回転した際に、第1アーム部の突出部と基台の規制部との間に挟み込まれた弾性部材は押しつぶされる。その結果、緩衝部材としての弾性部材の破片が飛散する。そこで、緩衝部材の破片の飛散を抑制できるロボットが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、緩衝部材の破片の飛散を抑制できるロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるロボットは、第1部材と、第1部材に対して相対的に移動する第2部材と、第1部材の一部である第1部分と第2部材の一部である第2部分とを含み、第1部材と第2部材との相対的な移動を規制する規制部と、第1部材と第2部材とのうちの少なくとも一方に、かつ、第1部分と第2部分との間に配置される緩衝部材と、第1部材と第2部材とのうちの少なくとも一方に配置され、緩衝部材を覆うカバー部材と、を備える。
【0007】
この開示の一の局面によるロボットは、上記のように、緩衝部材を覆うように配置されているカバー部材を備える。これにより、第1部分と第2部分とが接近した際において、第1部分と第2部分との間に配置される緩衝部材が変形して破片が生じた場合でも、破片はカバー部材により覆われている。その結果、緩衝部材の破片の飛散を抑制できる。
【発明の効果】
【0008】
本開示によれば、ロボットは、緩衝部材の破片の飛散を抑制できる。
【図面の簡単な説明】
【0009】
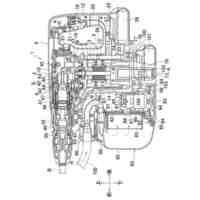
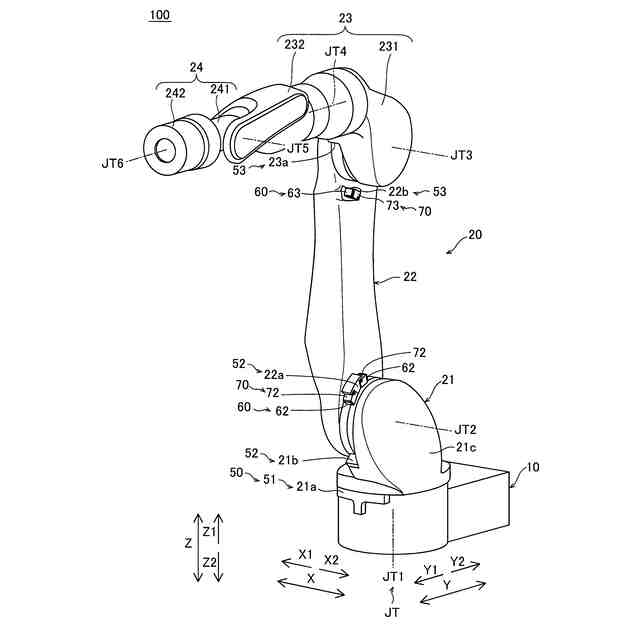
一実施形態によるロボットを示す図である。
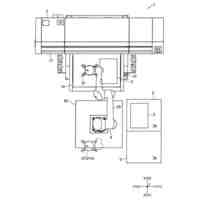
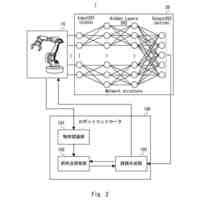
一実施形態によるロボットおよび制御装置のブロック図である。
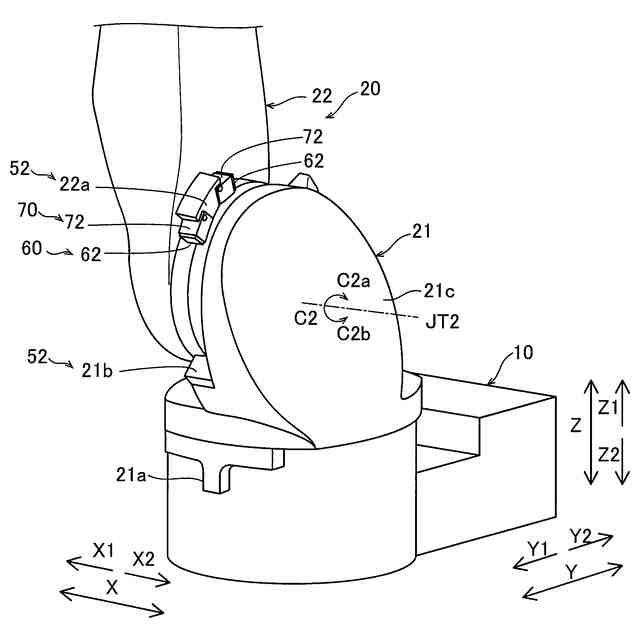
一実施形態による基台に配置される緩衝部材およびカバー部材を示す図である。
一実施形態による基台に配置される緩衝部材およびカバー部材と、第1アーム部の回転台側の部分に配置される緩衝部材およびカバー部材と、を示す図である。
一実施形態による第1アーム部の回転台側の部分に配置される緩衝部材およびカバー部材を示す図である。
一実施形態による第1アーム部の第2アーム部側の部分に配置される緩衝部材およびカバー部材を示す図である。
一実施形態による第1アーム部の回転台側の部分に配置される緩衝部材およびカバー部材を示す拡大図である。
カバー部材が取り外された状態の緩衝部材を示す図である。
一実施形態によるカバー部材を示す図である。
図9に示されるカバー部材を別の角度から見た図である。
変形例による回転台に配置されたカバー部材と第1アーム部に配置された緩衝部材とを示す図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。なお、本願明細書において、上下方向をZ方向とする。上方側をZ1側とし、下方側をZ2側とする。Z方向に直交する方向をX方向とする。X方向の一方側をX1側とし、他方側をX2側とする。Z方向およびX方向に直交する方向をY方向とする。Y方向の一方側をY1側とし、他方側をY2側とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
3日前
株式会社マキタ
電動工具
11日前
日本車輌製造株式会社
締め付け工具
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットリスト
11日前
川崎重工業株式会社
ロボットシステム
11日前
CKD株式会社
吸着型搬送装置
25日前
川崎重工業株式会社
塗装ロボット
1か月前
ジヤトコ株式会社
圧入装置
24日前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社スター精機
ワーク搬送装置
今日
株式会社アマダ
磁気吸着装置
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
11日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
3日前
モトコマ株式会社
寄せポンチホルダー
12日前
有限会社松尾エンジニアリング
連結部材
12日前
株式会社DailyColor
ロボットハンド
12日前
株式会社マキタ
電動工具用集塵システム
1か月前
個人
ターンバックル用工具
18日前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
17日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
3日前
株式会社マキタ
作業機
24日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ