TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024140244
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023051290
出願日
2023-03-28
発明の名称
回転駆動力伝達機構
出願人
日本精工株式会社
代理人
個人
,
個人
主分類
B25J
17/00 20060101AFI20241003BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
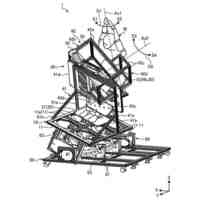
【課題】コンパクトな構成を有すると共に、モータの回転軸の回転エネルギーを効率良く蓄積・解放することができる回転駆動力伝達機構を提供すること。
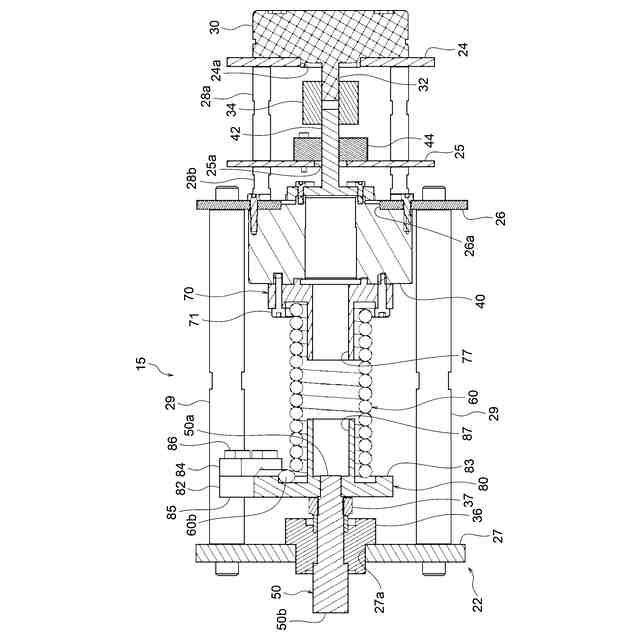
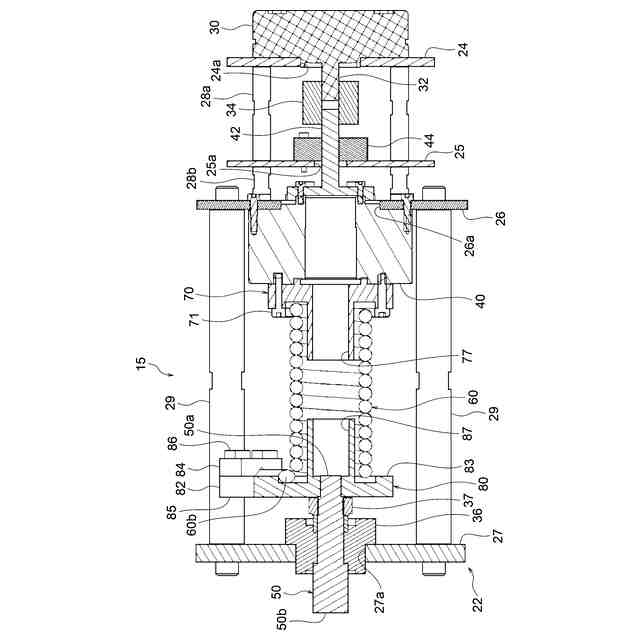
【解決手段】回転駆動源と、前記回転駆動源の回転を出力する出力軸との間に設けられた回転駆動力伝達機構であって、前記回転駆動源の回転中心軸及び前記出力軸と同一軸上に設けられ、前記回転駆動源の回転力を前記出力軸に伝達するねじりコイルばねを有する。
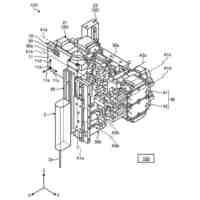
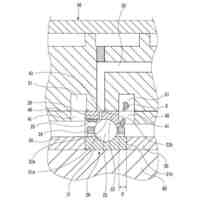
【選択図】 図2
特許請求の範囲
【請求項1】
回転駆動源と、前記回転駆動源の回転を出力する出力軸との間に設けられた回転駆動力伝達機構であって、
前記回転駆動源の回転中心軸及び前記出力軸と同一軸上に設けられ、前記回転駆動源の回転力を前記出力軸に伝達するねじりコイルばねを有する回転駆動力伝達機構。
続きを表示(約 1,000 文字)
【請求項2】
前記回転駆動力伝達機構は、前記ねじりコイルばねを収容するハウジングと、前記前記ハウジング内部に固定された固定モジュールとを有し、
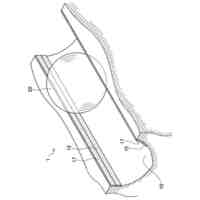
前記ねじりコイルばねは、巻回部と、前記巻回部の両端に位置する直線部とを有し、
前記直線部は前記固定モジュールに固定されている請求項1に記載の回転駆動力伝達機構。
【請求項3】
前記固定モジュールは、前記ねじりコイルばねの前記直線部の円形断面を少なくとも3点で押さえる請求項2に記載の回転駆動力伝達機構。
【請求項4】
前記固定モジュールは、前記ねじりコイルの巻回部に挿入されて前記巻回部を支持するガイド部を有する請求項2に記載の回転駆動力伝達機構。
【請求項5】
前記固定モジュールは、前記ねじりコイルばねの前記直線部に係合する溝を有する請求項2に記載の回転駆動力伝達機構。
【請求項6】
前記固定モジュールは、第1固定部材と、前記第1固定部材に固定される第2固定部材とを有し、前記ねじりコイルばねの前記直線部は、前記第1固定部材と前記第2固定部材の間に挟持される請求項2に記載の回転駆動力伝達機構。
【請求項7】
前記第1固定部材は第1溝部を有し、前記第2固定部材は前記第1溝部に組み合わされる第2溝部を有し、前記第1固定部材に前記第2固定部材が固定されると、前記ねじりコイルばねの前記直線部は、前記第1溝部と前記第2溝部により挟持される請求項6に記載の回転駆動力伝達機構。
【請求項8】
前記第1固定部材に前記第2固定部材が固定された状態で、前記第1固定部材と記第2固定部材の間には隙間が形成される請求項7に記載の回転駆動力伝達機構。
【請求項9】
前記回転駆動力伝達機構はロボットの関節部に設けられ、
前記回転駆動源はモータであり、前記回転駆動源の回転を出力する出力軸は、前記関節部の出力軸である請求項8に記載の回転駆動力伝達機構。
【請求項10】
回転駆動源と、
前記回転駆動源の回転を出力する出力軸と、
前記回転駆動源と前記出力軸の間に設けられた、請求項1~9のいずれかに記載の回転駆動力伝達機構と、
前記出力軸の回転により回動するアームと、
を有するロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
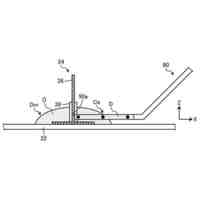
本発明は回転駆動力伝達機構に関し、例えば、ロボットの関節部に設けられて、アクチュエータの回転駆動力を関節部の出力軸に伝達する機構に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
関節を有するロボットとして、工業用ロボット、医療ロボット、介護ロボット等が知られている。ロボットの関節部を回動させるために、回転駆動力を生成するアクチュエータ(モータ)が関節部に設けられる。特許文献1には、モータを備えたロボット関節部が開示されている。
特許文献1のロボットの関節部は、モータ及び歯車列(変速機)で構成される動力伝達系統と、クラッチ及びねじりコイルばねで構成されるエネルギー蓄積・解放系統とを有している。コイルばねは、動力伝達系統に作用するエネルギー(トルク)を蓄積及び開放するための部材である。
【先行技術文献】
【特許文献】
【0003】
特開2018-126854号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
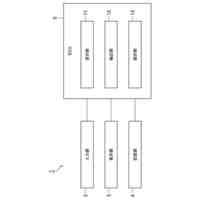
しかしながら、特許文献1のロボットの関節部では、モータ及び歯車列で構成される動力伝達系統と、クラッチ及びコイルばねで構成されるエネルギー蓄積・解放系統とが、並列に配置されている。つまり、モータ及び歯車列で構成される動力伝達系統の横に、クラッチ及びコイルばねで構成されるエネルギー蓄積・解放系統が配置される。その結果、モータ及び歯車列で構成される動力伝達系統を設けるスペースに加えて、クラッチ及びコイルばねで構成されるエネルギー蓄積・解放系統を設けるためのスペースが必要になり、ロボットの関節部を小型化することができない。また、エネルギー蓄積・解放系統が動力伝達系統に並列配置されているので、モータの回転軸とコイルばねの長手方向が平行になる。つまり、コイルばねは、モータの回転軸の回転エネルギーを蓄積・解放する際に、コイルばねに並列して回転するモータの回転軸の回転エネルギーを蓄積・解放することになり、効率的な回転エネルギーの蓄積・解放ができない。
【0005】
本発明は、上記した課題を解決するために、コンパクトな構成を有すると共に、モータの回転軸の回転エネルギーを効率良く蓄積・解放することができる回転駆動力伝達機構を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の1つの態様に係る回転駆動力伝達機構は、回転駆動源と、前記回転駆動源の回転を出力する出力軸との間に設けられた回転駆動力伝達機構であって、前記回転駆動源の回転中心軸及び前記出力軸と同一軸上に設けられ、前記回転駆動源の回転力を前記出力軸に伝達するねじりコイルばねを有する。
【0007】
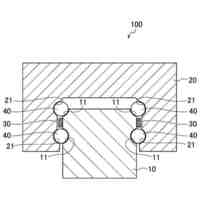
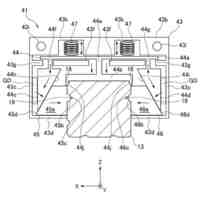
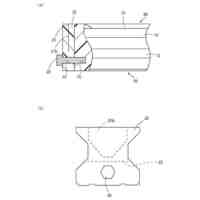
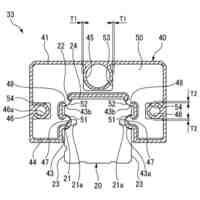
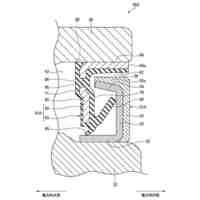
前記回転駆動力伝達機構は、前記ねじりコイルばねを収容するハウジングと、前記前記ハウジング内部に固定された固定モジュールとを有してもよい。前記ねじりコイルばねは、巻回部と、前記巻回部の両端に位置する直線部とを有してもよい。前記直線部は前記固定モジュールに固定されてもよい。
【0008】
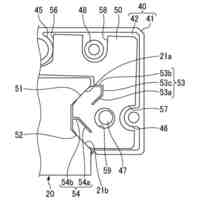
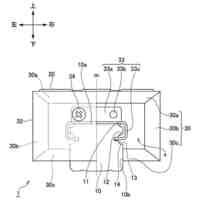
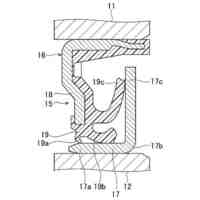
好ましくは、前記固定モジュールは、前記ねじりコイルばねの前記直線部の円形断面を少なくとも3点で押さえる。
前記固定モジュールは、前記ねじりコイルの巻回部に挿入されて前記巻回部を支持(ガイド)するガイド部を有してもよい。
前記固定モジュールは、前記ねじりコイルばねの前記直線部に係合する溝を有してもよい。
【0009】
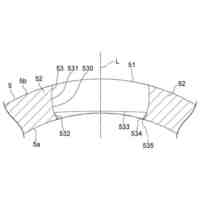
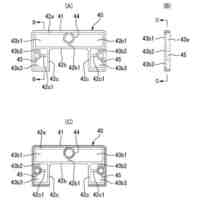
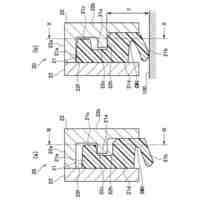
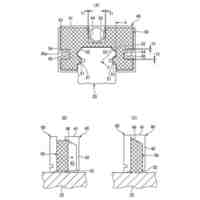
前記固定モジュールは、第1固定部材と、前記第1固定部材に固定される第2固定部材とを有してもよい。前記ねじりコイルばねの前記直線部は、前記第1固定部材と前記第2固定部材の間に挟持されてもよい。
前記第1固定部材は第1溝部を有してもよい。前記第2固定部材は前記第1溝部に組み合わされる第2溝部を有してもよい。好ましくは、前記第1固定部材に前記第2固定部材が固定されると、前記ねじりコイルばねの前記直線部は、前記第1溝部と前記第2溝部により挟持される。
【0010】
前記第1固定部材に前記第2固定部材が固定された状態で、好ましくは、前記第1固定部材と記第2固定部材の間に隙間が形成される。
前記回転駆動力伝達機構はロボットの関節部に設けられてもよい。前記回転駆動源はモータであってもよい。前記回転駆動源の回転を出力する出力軸は、前記関節部の出力軸であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
直動装置
19日前
日本精工株式会社
検査装置
1か月前
日本精工株式会社
転がり軸受
1か月前
日本精工株式会社
直動案内装置
5日前
日本精工株式会社
レールカバー
26日前
日本精工株式会社
直動案内装置
1か月前
日本精工株式会社
直動案内装置
1か月前
日本精工株式会社
直動案内装置
5日前
日本精工株式会社
円錐ころ軸受
26日前
日本精工株式会社
円錐ころ軸受
26日前
日本精工株式会社
リニアガイド
1か月前
日本精工株式会社
リニアガイド
13日前
日本精工株式会社
リニアガイド
1か月前
日本精工株式会社
アクチュエータ
20日前
日本精工株式会社
ボールねじ装置
19日前
日本精工株式会社
軸受情報提示装置
19日前
日本精工株式会社
軸受又は直動装置
19日前
日本精工株式会社
リニアガイド装置
27日前
日本精工株式会社
軸受装置及びスピンドル装置
1か月前
日本精工株式会社
直動案内装置及びその製造方法
1か月前
日本精工株式会社
ボールねじ装置のねじ軸の製造方法
27日前
日本精工株式会社
ボールねじ及びボールねじの製造方法
1か月前
日本精工株式会社
密封装置及び密封装置付き軸受ユニット
1か月前
日本精工株式会社
直動案内装置のスライダ移設用スペーサ
9日前
日本精工株式会社
細胞注入装置、細胞回収補助治具、及び細胞回収方法
21日前
日本精工株式会社
モータ制御装置、モータ制御方法、及びモータシステム
6日前
日本精工株式会社
組合せシールリング及び組合せシールリングを備えるハブユニット軸受
1か月前
日本精工株式会社
ねじ軸、ボールねじ装置、ねじ軸の製造方法、及びボールねじ装置の組み立て方法
1か月前
日本精工株式会社
軸受の溝径測定方法及び溝径測定装置、並びに転がり軸受の製造方法、機械、及び車両の製造方法
1か月前
個人
腰袋
12日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
3か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
5日前
株式会社マキタ
打撃工具
3か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ