TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025024479
公報種別
公開特許公報(A)
公開日
2025-02-20
出願番号
2023128623
出願日
2023-08-07
発明の名称
モータ制御装置、モータ制御方法、及びモータシステム
出願人
日本精工株式会社
代理人
弁理士法人栄光事務所
主分類
H02P
21/05 20060101AFI20250213BHJP(電力の発電,変換,配電)
要約
【課題】N次関数による伝達関数を使用した制御信号を用いる場合でも、信号に混入したノイズの増幅を抑制する。
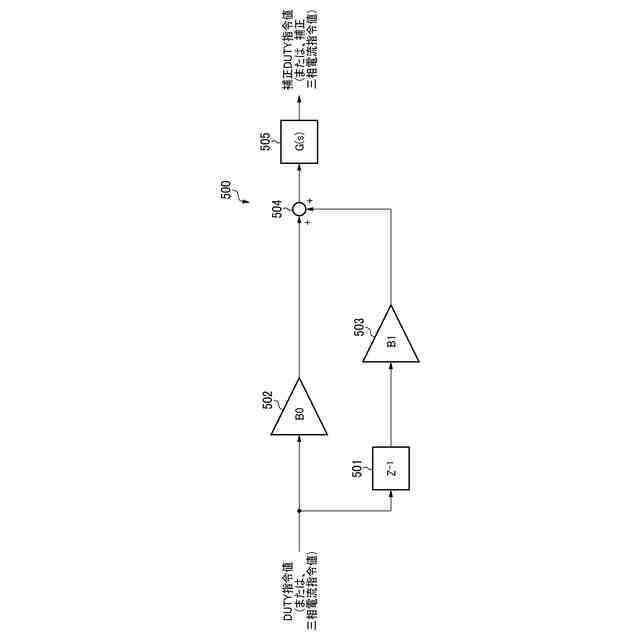
【解決手段】電流指令値に基づいて三相モータを制御するモータ制御装置であって、前記電流指令値に基づいて制御信号を導出する導出手段と、N次関数に基づく外挿により、前記制御信号に対する未来の予測値を演算する演算手段と、前記予測値に対し、前記N次関数に基づくゲイン特性の逆特性を掛け合わせることにより、補正を行う補正手段と、前記補正手段にて補正された予測値を用いて、前記三相モータを制御する制御手段と、を有する。
【選択図】図5
特許請求の範囲
【請求項1】
電流指令値に基づいて三相モータを制御するモータ制御装置であって、
前記電流指令値に基づいて制御信号を導出する導出手段と、
N次関数に基づく外挿により、前記制御信号に対する未来の予測値を演算する演算手段と、
前記予測値に対し、前記N次関数に基づくゲイン特性の逆特性を掛け合わせることにより、補正を行う補正手段と、
前記補正手段にて補正された予測値を用いて、前記三相モータを制御する制御手段と、
を有する、モータ制御装置。
続きを表示(約 670 文字)
【請求項2】
前記制御信号は、三相のDuty指令値、または、三相の電流指令値である、請求項1に記載のモータ制御装置。
【請求項3】
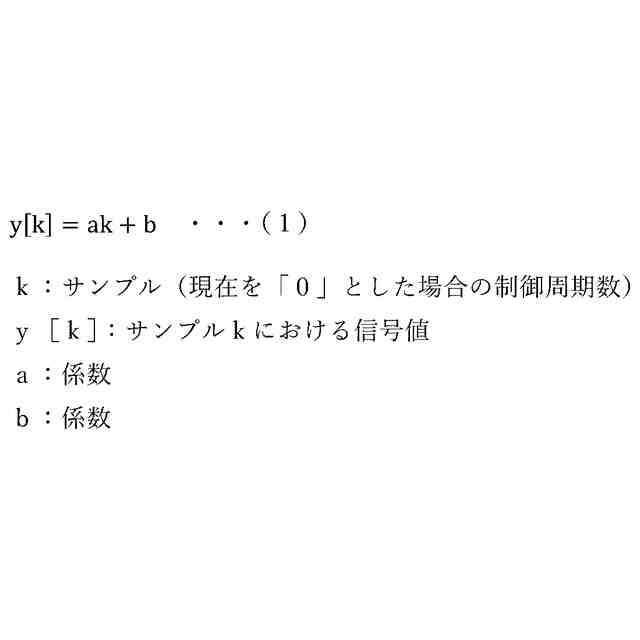
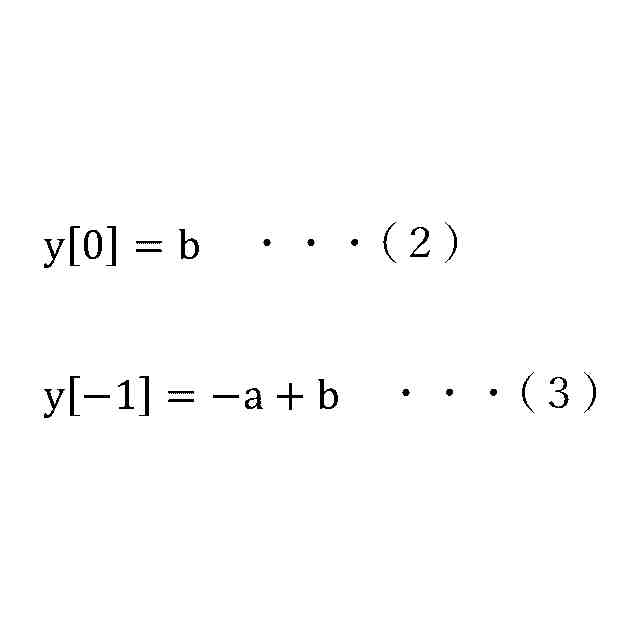
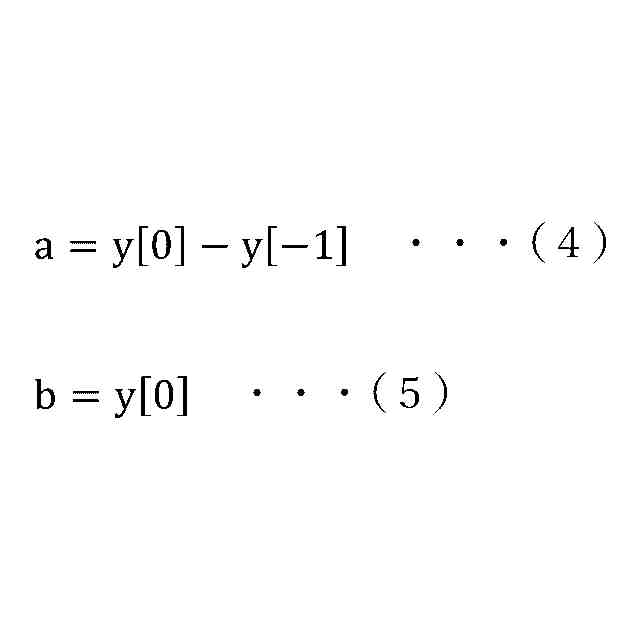
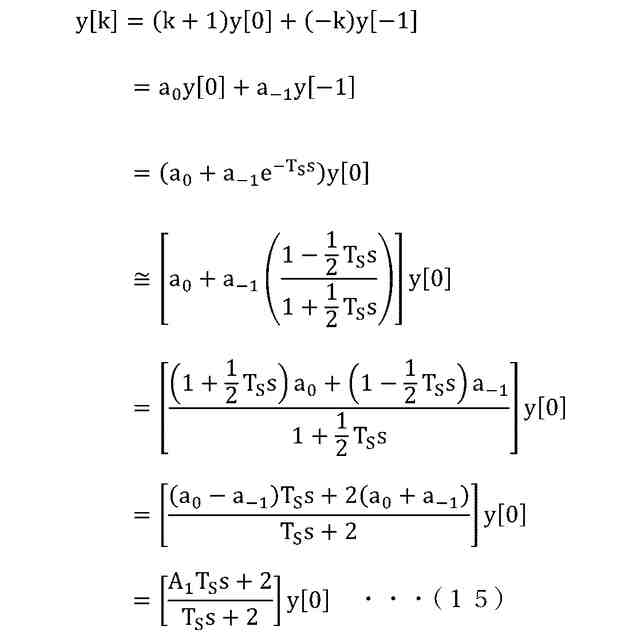
前記N次関数は一次関数であり、
前記一次関数に基づくゲイン特性の逆特性は、以下の式(1)にて示される、請求項1に記載のモータ制御装置。
TIFF
2025024479000020.tif
39
130
【請求項4】
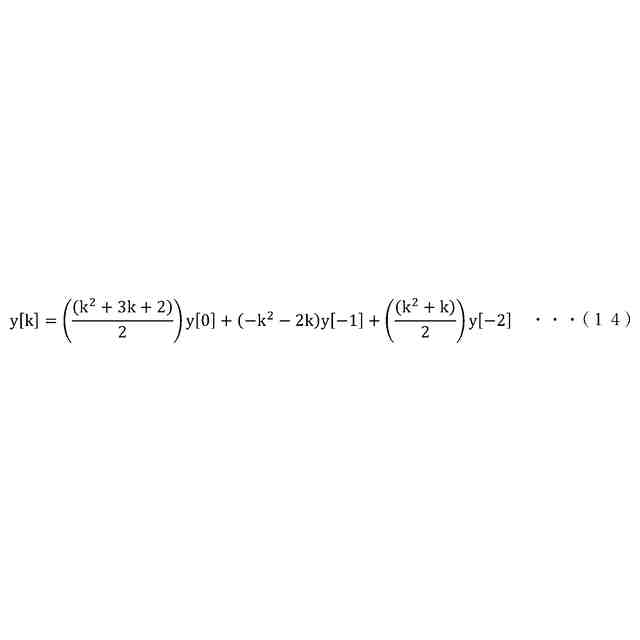
前記N次関数は二次関数であり、
前記二次関数に基づくゲイン特性の逆特性は、以下の式(2)にて示される、請求項1に記載のモータ制御装置。
TIFF
2025024479000021.tif
42
130
【請求項5】
電流指令値に基づいて三相モータを制御するモータ制御方法であって、
前記電流指令値に基づいて制御信号を導出する導出工程と、
N次関数に基づく外挿により、前記制御信号に対する未来の予測値を演算する演算工程と、
前記予測値に対し、前記N次関数に基づくゲイン特性の逆特性を掛け合わせることにより、補正を行う補正工程と、
前記補正工程にて補正された予測値を用いて、前記三相モータを制御する制御工程と、
を有する、モータ制御方法。
【請求項6】
請求項1から4のいずれか一項に記載のモータ制御装置と、
前記モータ制御装置にて制御される三相モータと、
を備えるモータシステム。
発明の詳細な説明
【技術分野】
【0001】
本願発明は、モータ制御装置、モータ制御方法、及びモータシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、電動パワーステアリング装置や鉄道動揺防止アクチュエータなどの様々な装置で永久磁石型の同期電動機が用いられている。このような電動機では、周波数や電圧、電流、位相などを制御可能な電源から電力を供給し、その動作を制御することが行われている。
【0003】
一般に、モータに対する制御を行うための信号は、A/D変換(アナログ-デジタル変換)や制御信号演算処理などに起因して遅延が生じ得る。例えば、特許文献1では、電動パワーステアリング装置に備えられたブラシレスモータにおける遅延を抑制して制御するために、一次関数や二次関数に基づく外挿補間を行うことで電気角の未来の値を予測し、これに基づいて未来のDuty指令値を計算する構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
再表2019-083015号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、一次関数や二次関数に基づく外挿を用いて制御信号の補正を行う場合、高周波側でゲイン特性が上昇し、制御信号にノイズが混入している場合にはこれを増幅してしまうという課題がある。高周波側でノイズが増幅された結果、意図しない音や振動が発生してしまう。このような、高周波側において、制御信号に混入したノイズの増幅を抑制することが求められる。
【0006】
上記課題を鑑み、本願発明は、N次関数に基づく外挿による制御信号を用いてモータの制御を行う場合でも、制御信号に混入したノイズの増幅を抑制することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本願発明は以下の構成を有する。すなわち、電流指令値に基づいて三相モータを制御するモータ制御装置であって、
前記電流指令値に基づいて制御信号を導出する導出手段と、
N次関数に基づく外挿により、前記制御信号に対する未来の予測値を演算する演算手段と、
前記予測値に対し、前記N次関数に基づくゲイン特性の逆特性を掛け合わせることにより、補正を行う補正手段と、
前記補正手段にて補正された予測値を用いて、前記三相モータを制御する制御手段と、
を有する、モータ制御装置。
【0008】
また、本願発明の別の形態は以下の構成を有する。すなわち、電流指令値に基づいて三相モータを制御するモータ制御方法であって、
前記電流指令値に基づいて制御信号を導出する導出工程と、
N次関数に基づく外挿により、前記制御信号に対する未来の予測値を演算する演算工程と、
前記予測値に対し、前記N次関数に基づくゲイン特性の逆特性を掛け合わせることにより、補正を行う補正工程と、
前記補正工程にて補正された予測値を用いて、前記三相モータを制御する制御工程と、
を有する、モータ制御方法。
【0009】
また、本願発明の別の形態は以下の構成を有する。すなわち、モータシステムであって、
モータ制御装置と、
前記モータ制御装置にて制御される三相モータと、
を備え、
前記モータ制御装置は、
電流指令値に基づいて制御信号を導出する導出手段と、
N次関数に基づく外挿により、前記制御信号に対する未来の予測値を演算する演算手段と、
前記予測値に対し、前記N次関数に基づくゲイン特性の逆特性を掛け合わせることにより、補正を行う補正手段と、
前記補正手段にて補正された予測値を用いて、前記三相モータを制御する制御手段と、
を有する、モータシステム。
【発明の効果】
【0010】
本願発明により、N次関数に基づく外挿による制御信号を用いてモータの制御を行う場合でも、制御信号に混入したノイズの増幅を抑制することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ