TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018946
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2024097705
出願日
2024-06-17
発明の名称
アクチュエータ
出願人
日本精工株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A61B
34/35 20160101AFI20250130BHJP(医学または獣医学;衛生学)
要約
【課題】交換された場合においても比較的高い位置精度を維持することができるアクチュエータを提供すること。
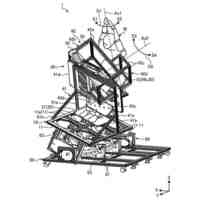
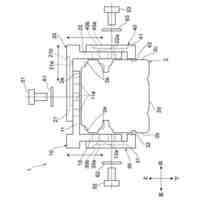
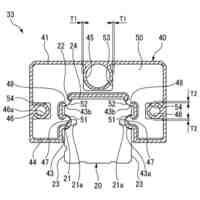
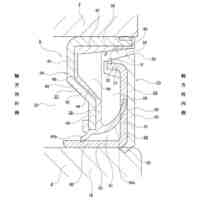
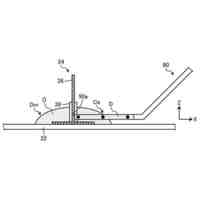
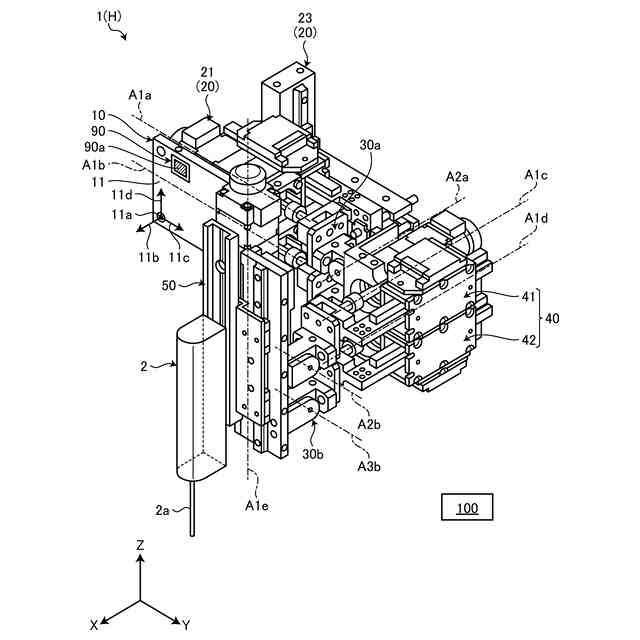
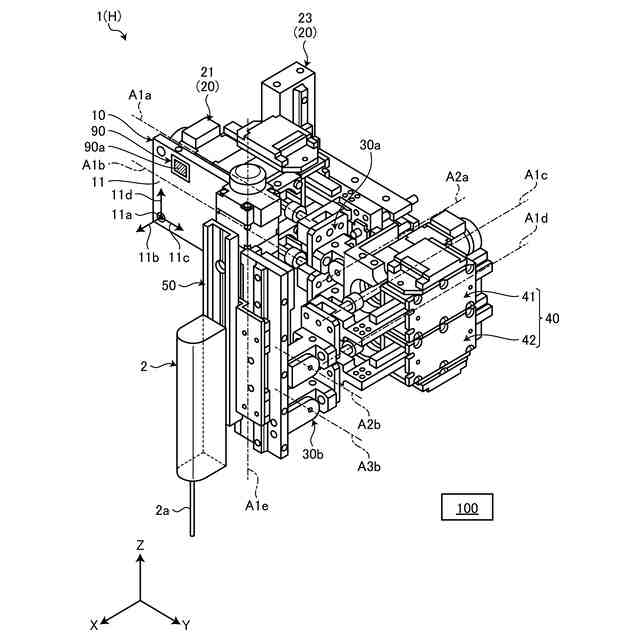
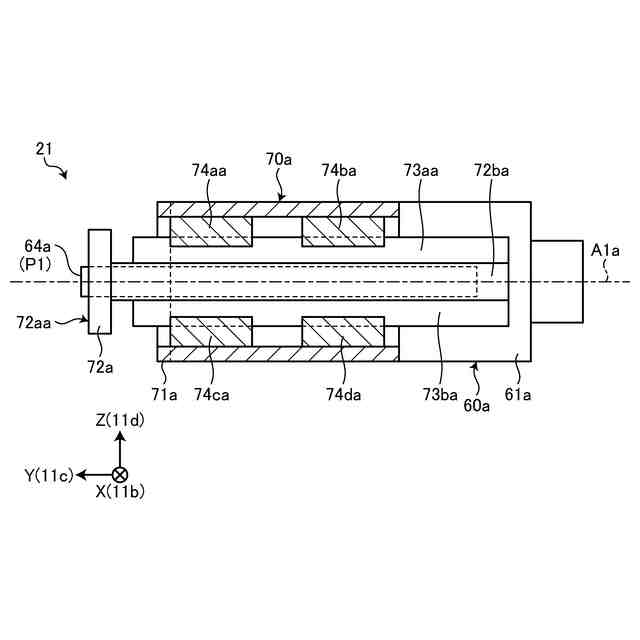
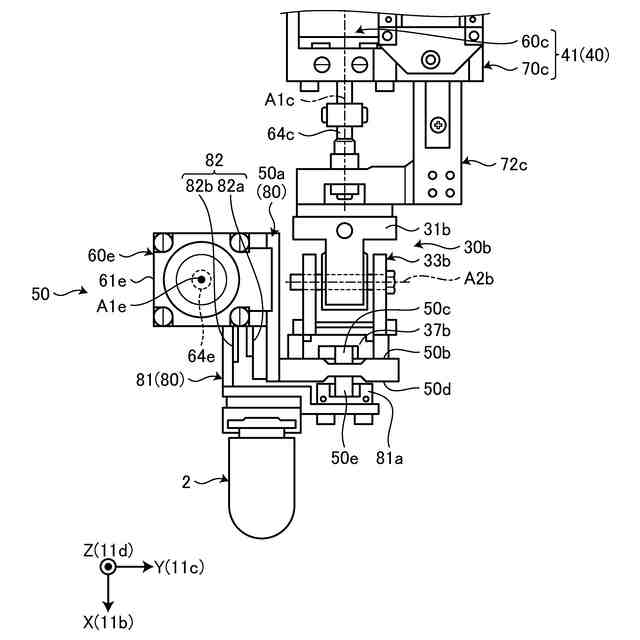
【解決手段】アクチュエータ1は、ハウジング61a、ハウジング61aに収容されているナット63a、ナット63aが回転することで軸線A1aに沿ってハウジング61aに対して移動するねじ軸64a、および、ねじ軸64aの移動量を検出するリニアエンコーダ75aを有する駆動部60aと、駆動部60aの諸元に関する個体データが格納されている格納部90と、を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
ハウジング、前記ハウジングに収容されているナット、前記ナットが回転することで軸線に沿って前記ハウジングに対して移動するねじ軸、および、前記ねじ軸の移動量を検出するリニアエンコーダを有する駆動部と、
前記駆動部の諸元に関する個体データが格納されている格納部と、を備えている、
アクチュエータ。
続きを表示(約 1,100 文字)
【請求項2】
前記リニアエンコーダは、インクリメンタル方式のリニアエンコーダである、
請求項1に記載のアクチュエータ。
【請求項3】
前記個体データは、前記軸線に沿う方向における前記リニアエンコーダのスケールの基準取付位置に対する取付位置の距離を含む、
請求項1に記載のアクチュエータ。
【請求項4】
前記個体データは、前記軸線に沿う方向に対する前記リニアエンコーダのスケールが延びる方向の第1傾斜角度を含む、
請求項1に記載のアクチュエータ。
【請求項5】
前記個体データは、前記ねじ軸が所定位置にあるときの前記軸線に沿う方向における前記ねじ軸の所定部位と前記ナットの所定部位との距離を含む、
請求項1に記載のアクチュエータ。
【請求項6】
前記ねじ軸を前記軸線に沿って案内するガイド部材をさらに備え、
前記個体データは、前記ねじ軸が所定位置にあるときの前記軸線に沿う方向における前記ガイド部材の所定部位と前記ハウジングの所定部位との距離を含む、
請求項1に記載のアクチュエータ。
【請求項7】
前記ねじ軸を前記軸線に沿って案内するガイド部材をさらに備え、
前記リニアエンコーダは、基準位置を有するスケール、および、前記基準位置を検出するヘッドを備え、
前記個体データは、前記ねじ軸が所定位置にあるときの前記軸線に沿う方向における、前記ガイド部材の第2の所定部位と前記ハウジングの第2の所定部位との距離、および、前記ヘッドと前記基準位置との距離を含む、
請求項1に記載のアクチュエータ。
【請求項8】
前記個体データは、前記軸線に対する前記ねじ軸の中心軸線の第2傾斜角度を含む、
請求項1に記載のアクチュエータ。
【請求項9】
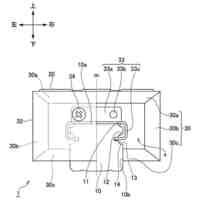
前記格納部は、前記個体データが変換された二次元コードの画像を有する、
請求項1に記載のアクチュエータ。
【請求項10】
前記ねじ軸を前記軸線に沿って案内するガイド部材をさらに備え、
前記リニアエンコーダは、基準位置を有するスケール、および、前記基準位置を検出するヘッドを備え、
前記個体データは、前記ヘッドが前記基準位置を検出したときの前記軸線に沿う方向における、前記ガイド部材の第2の所定部位と前記ハウジングの第2の所定部位との距離を含む、
請求項1に記載のアクチュエータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、アクチュエータに関する。
続きを表示(約 970 文字)
【背景技術】
【0002】
特許文献1には、ロボットアームを備える手術支援装置が開示されている。ロボットアームは、鉗子、内視鏡および電子メスなどの器具を保持し、医師によって操作されることで、手術を支援する。
【先行技術文献】
【特許文献】
【0003】
特開2020-65644号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
手術を支援するロボットアーム(アクチュエータ)には、比較的高い位置精度が必要である。しかしながら、アクチュエータが交換された場合には、アクチュエータが有する個体差によって、医師の操作量が同じであるにも関わらず、交換の前後で器具の移動後の位置が異なる可能性がある。この場合、位置精度が低下する可能性がある。
【0005】
本開示の態様は、交換された場合においても比較的高い位置精度を維持することができるアクチュエータを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るアクチュエータは、ハウジング、前記ハウジングに収容されているナット、前記ナットが回転することで軸線に沿って前記ハウジングに対して移動するねじ軸、および、前記ねじ軸の移動量を検出するリニアエンコーダを有する駆動部と、前記駆動部の諸元に関する個体データが格納されている格納部と、を備えている。
【0007】
これによれば、個体データに基づいてねじ軸の移動量を補正することができる。よって、アクチュエータは、交換された場合においても比較的高い位置精度を維持することができる。
【0008】
本開示の一態様に係るアクチュエータにおいて、前記リニアエンコーダは、インクリメンタル方式のリニアエンコーダである。
【0009】
これによれば、リニアエンコーダの低コスト化を図ることができる。
【0010】
本開示の一態様に係るアクチュエータにおいて、前記個体データは、前記軸線に沿う方向における前記リニアエンコーダのスケールの基準取付位置に対する取付位置の距離を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
検査装置
13日前
日本精工株式会社
転がり軸受
17日前
日本精工株式会社
直動案内装置
13日前
日本精工株式会社
レールカバー
6日前
日本精工株式会社
円錐ころ軸受
6日前
日本精工株式会社
円錐ころ軸受
6日前
日本精工株式会社
ストッパ装置
20日前
日本精工株式会社
直動案内装置
13日前
日本精工株式会社
リニアガイド
17日前
日本精工株式会社
リニアガイド
13日前
日本精工株式会社
アクチュエータ
今日
日本精工株式会社
潤滑剤供給部品
20日前
日本精工株式会社
円すいころ軸受
22日前
日本精工株式会社
ハブユニット軸受
20日前
日本精工株式会社
リニアガイド装置
7日前
日本精工株式会社
直動アクチュエータ
20日前
日本精工株式会社
軸受装置及びスピンドル装置
14日前
日本精工株式会社
直動案内装置及びその製造方法
13日前
日本精工株式会社
ボールねじ装置のねじ軸の製造方法
7日前
日本精工株式会社
ボールねじ及びボールねじの製造方法
13日前
日本精工株式会社
密封装置及び密封装置付き軸受ユニット
13日前
日本精工株式会社
軸受内蔵型ローラおよび全方向移動型車輪
20日前
日本精工株式会社
リニアガイド用サイドシール及びリニアガイド
20日前
日本精工株式会社
エンドキャップおよびそれを用いた直動案内装置
20日前
日本精工株式会社
細胞注入装置、細胞回収補助治具、及び細胞回収方法
1日前
日本精工株式会社
制御装置、モータ、アクチュエータ、制御方法およびプログラム
20日前
日本精工株式会社
データ処理装置、アクチュエータ装置、および、制御プログラム
20日前
日本精工株式会社
組合せシールリング及び組合せシールリングを備えるハブユニット軸受
17日前
日本精工株式会社
ねじ軸、ボールねじ装置、ねじ軸の製造方法、及びボールねじ装置の組み立て方法
17日前
日本精工株式会社
軸受の溝径測定方法及び溝径測定装置、並びに転がり軸受の製造方法、機械、及び車両の製造方法
13日前
個人
歯茎みが品
13日前
個人
男性用下着
7か月前
個人
穿刺補助具
7か月前
個人
歯の掃除具
3か月前
個人
錠剤撒き器
5か月前
個人
導電香
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ