TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024137409
公報種別
公開特許公報(A)
公開日
2024-10-07
出願番号
2023048930
出願日
2023-03-24
発明の名称
遠隔操作ロボット機構
出願人
白山工業株式会社
代理人
個人
主分類
B25J
3/00 20060101AFI20240927BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】遠隔操作ロボットにおいて、先端にカメラを取り付けた軽量な受動アームスタンドを作業アームでマニピュレーションすることで、作業視点の移動を可能とする遠隔操作ロボット機構を提供すること。
【解決手段】
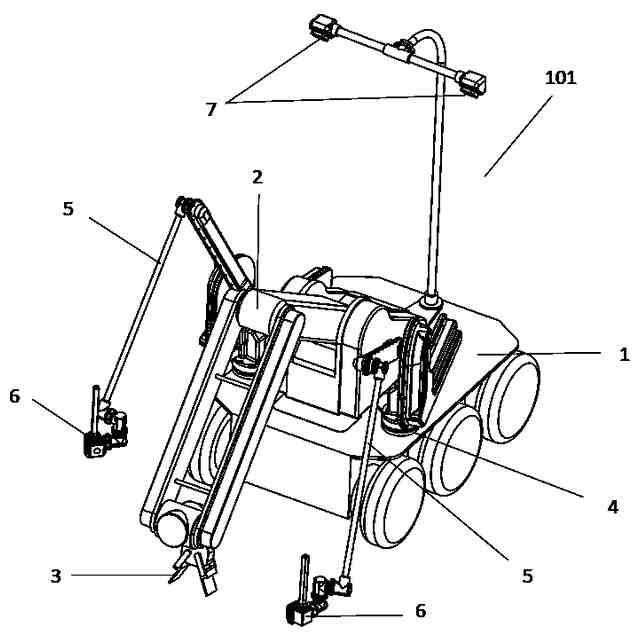
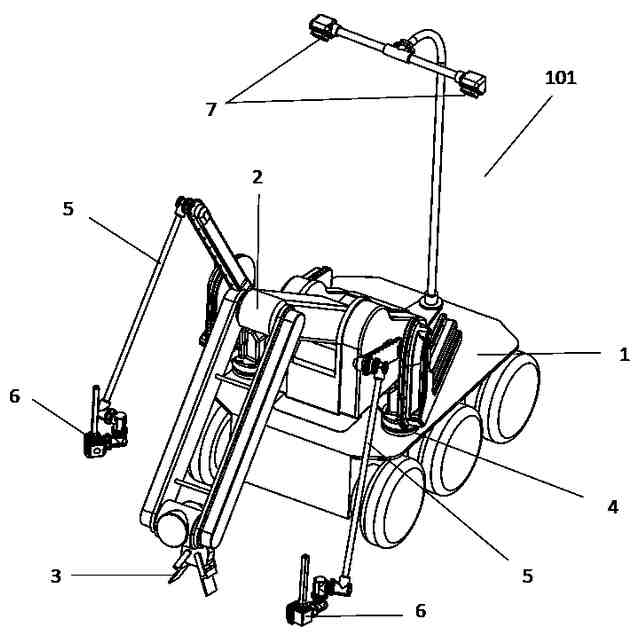
基台部と、基台部との接続部に旋回軸を有し、遠隔操作により作業を行う作業アームと、前記作業アームの近傍に設置され、関節部の摩擦により姿勢の保持が可能な受動関節からなるアームスタンドと、前記アームスタンドの先端に取り付けられた作業監視装置および/または作業補助装置とを備え、前記作業アームが前記移動カメラを所望の位置に移動させるための機構を備える、遠隔操作ロボット機構
【選択図】図2
特許請求の範囲
【請求項1】
基台部と;
基台部との接続部に旋回軸を有し、遠隔操作により作業を行う作業アームと;
前記作業アームの近傍に設置され、関節部の摩擦により姿勢の保持が可能な受動関節からなるアームスタンドと;
前記アームスタンドの先端に取り付けられた作業監視装置および/または作業補助装置と;
を備え、
前記作業アームが前記移動カメラを所望の位置に移動させるための機構を備える、
遠隔操作ロボット機構。
続きを表示(約 290 文字)
【請求項2】
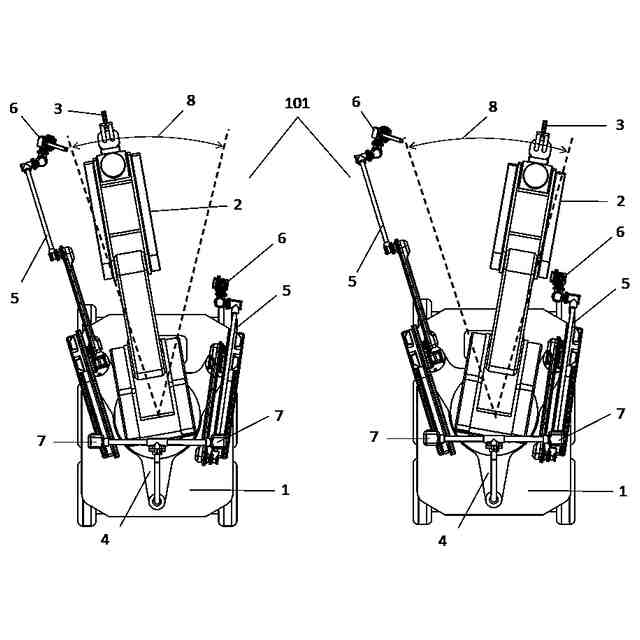
前記アームスタンドが自重補償機構を備える、請求項1に記載の遠隔操作ロボット機構。
【請求項3】
前記作業アームの根元の旋回軸まわりの回転に対してあそびをもって連動するテーブルを備え、
前記アームスタンドの支持部が前記テーブル上に設置されるよう構成される、
請求項1または請求項2に記載の遠隔操作ロボット機構。
【請求項4】
前記テーブル上に前記作業アームと前記アームスタンドを俯瞰的に捉える固定カメラを備え、前記固定カメラが前記テーブルと連動するように構成される、請求項3に記載の遠隔操作ロボット機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作ロボットにおいて、先端にカメラを取り付けたアームスタンドを作業用アームでマニピュレーションすることで作業視点を移動するカメラ視点移動法を可能とする遠隔操作ロボット機構に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
遠隔操作ロボットでは、操縦者が遠隔地においてロボットもしくはその近傍に設置されたカメラの映像をもとに作業を行う必要がある。1台のカメラにより提示される視野およびロボットに搭載可能なカメラの数は限られているため、作業を円滑に行うためには、カメラの配置方法を工夫する、またはカメラ自体を動かして作業に応じた視野を確保する必要がある。
【0003】
例えば特許文献1および特許文献2に開示された遠隔操作ロボット機構は、作業アームが搭載された基台上にアームを俯瞰する固定カメラを配置する構成としている。特許文献3に開示された遠隔操作ロボット機構は、作業アームを俯瞰する固定カメラだけでなく、作業アームの先端にもカメラを搭載し、作業アームの手先で行う作業の様子が良く見える構成としている。
【0004】
一方、特許文献4に開示された構成は、カメラ自体を移動させることにより作業に必要な視野を確保する構成である。特許文献4に開示された遠隔操作ロボットは、作業アームが搭載された基台上に、先端にカメラを搭載した能動アームを搭載し、前記アームを操作することでカメラ視野を移動できる構成としている。
【先行技術文献】
【特許文献】
【0005】
特開平10-277976号
特開平6-65949号
WO2017/03351A1
特開2021―88027号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1および特許文献2に開示された構成のように、固定カメラにより作業アームを俯瞰する構成では、作業アーム先端がカメラの死角になりやすく、手先の細かな作業が難しい。特許文献3に開示された構成のように作業アームの手先にカメラを取り付ければ、死角を回避できるが、アームの操作中にカメラ視点が移動してしまうため、細かな作業が難しいうえ、操縦者がカメラ酔いしてしまうことが問題となる。一方、特許文献4に開示された構成のように、作業アームとは別に設置されたカメラ自体を移動させる構成であれば、作業アームの手先付近にカメラ視野を移動させて死角を回避できるほか、作業アームによる作業中でもカメラは動かないため、カメラ酔いしにくい。しかし、この構成では、カメラの視点移動に複数のアクチュエータを要するために、機構が重くなりがちであるほか、ロボットの電子回路を含むハードウェア構成が煩雑になる問題がある。
【0007】
そこで本発明では、遠隔操作ロボットにおいて、先端に作業監視装置および/または作業補助装置を取り付けたアームスタンドを作業アームでマニピュレーションすることにより作業視点の移動を可能とし作業環境の改善も図ることができる、遠隔操作ロボット機構を提供することを課題とする。特に、遠隔操作ロボットにおいて、先端にカメラを取り付けた軽量な受動アームスタンドを作業アームでマニピュレーションすることにより作業視点の移動を可能とする遠隔操作ロボット機構を提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明の第1の様態に係る遠隔操作ロボット機構は、
基台部と;
基台部との接続部に旋回軸を有し、遠隔操作により作業を行う作業アームと、
前記作業アームの近傍に設置され、関節部の摩擦により姿勢の保持が可能な受動関節からなるアームスタンドと、
前記アームスタンドの先端に取り付けられた作業監視装置および/または作業補助装置と、
前記作業アームが前記移動カメラを所望の位置に移動させるための機構を備える、遠隔操作ロボット機構である。
【0009】
また、本発明の他の実施態様は、前記アームスタンドが自重補償機構を備える、上記記載の遠隔操作ロボット機構である。
【0010】
また、本発明の他の実施態様は、前記作業アームの根元の旋回軸まわりの回転に対してあそびをもって連動するテーブルを備え、
前記アームスタンドの支持部が前記テーブル上に設置されるよう構成される、
上記記載の遠隔操作ロボット機構である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
白山工業株式会社
非平行4節リンク型指機構及びグリッパ
13日前
個人
腰袋
12日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
3か月前
株式会社マキタ
電動工具
5日前
株式会社マキタ
電動工具
20日前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
制御装置
3か月前
日本車輌製造株式会社
締め付け工具
20日前
川崎重工業株式会社
ロボットアーム
20日前
川崎重工業株式会社
ロボットアーム
20日前
川崎重工業株式会社
ロボット
3か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットリスト
20日前
川崎重工業株式会社
ロボット
2か月前
CKD株式会社
吸着型搬送装置
1か月前
学校法人立命館
ロボットハンド
3か月前
日本信号株式会社
作業機制御システム
5日前
川崎重工業株式会社
ロボットシステム
20日前
長堀工業株式会社
締結装置
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
6日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社アイエイアイ
グリッパー
3か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社マキタ
集塵アタッチメント
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































