TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025020669
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124184
出願日
2023-07-31
発明の名称
非平行4節リンク型指機構及びグリッパ
出願人
白山工業株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】4節リンクを非平行とすることにより、入力角が小さい領域ではほぼ平行動作で物体を把持でき、入力角が大きくなった状態も実現できると共に、指部材を後方に下げた状態で物体などを支えることも可能なロボットの指機構及びグリッパを提供する。
【解決手段】回動自在の対偶点P1及びP2に接続された第1のリンク部材と、回動自在の対偶点P3及びP4に接続された第2のリンク部材と、対偶点P2及びP4に装着された可動指部材とで構成され、対偶点P1及びP3が本体での固定点であり、4つの対偶点P1~P4を結ぶ四角形が平行四辺形を構成せず、第1のリンク部材を対偶点P1周りに回動させるか、第2のリンク部材を対偶点P3周りに回動させることで、可動指部材を運動させる非平行4節リンク型指機構及びそれを備えたグリッパである。
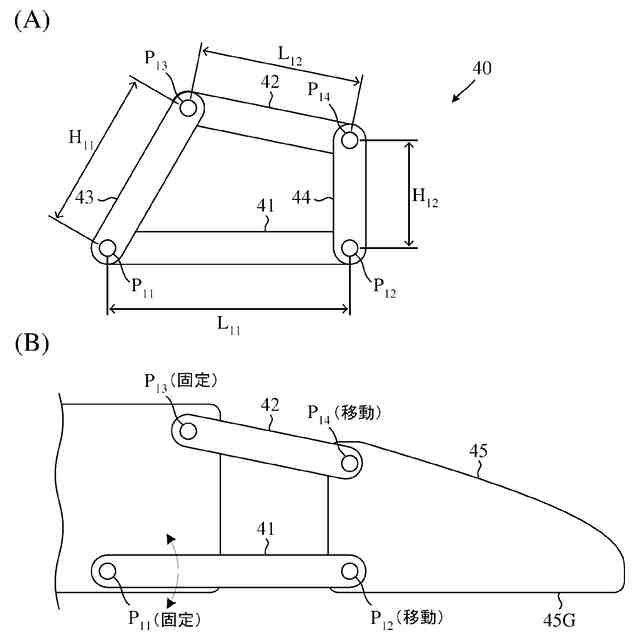
【選択図】図4
特許請求の範囲
【請求項1】
回動自在の対偶点P1及びP2に接続された第1のリンク部材と、
回動自在の対偶点P3及びP4に接続された第2のリンク部材と、
前記対偶点P2及びP4に装着された可動指部材と、
で構成され、
前記対偶点P1及びP3が前記本体での固定点であり、
前記4つの対偶点P1、P2、P3、P4を結ぶ四角形が平行四辺形を構成せず、
前記第1のリンク部材を前記対偶点P1周りに回動させるか、若しくは前記第2のリンク部材を前記対偶点P3周りに回動させることで、前記可動指部材を運動させることを特徴とする非平行4節リンク型指機構。
続きを表示(約 520 文字)
【請求項2】
前記対偶点P3及びP4の距離が、前記対偶点P1及びP2の距離に対して比率0.3~1.0である請求項1に記載の非平行4節リンク型指機構。
【請求項3】
前記可動指部材の把持面と前記対偶点1と前記対偶点2が同一直線状にある姿勢において、前記第1のリンク部材から前記対偶点P3までの距離が、前記第1のリンク部材から前記対偶点P4までの距離に対して、比率0.7~1.4である請求項1又は2に記載の非平行4節リンク型指機構。
【請求項4】
請求項1~3のいずれかに記載の非平行4節リンク型指機構を面対称に2つ配置するように構成され、
対向する2つの前記可動指部材の把持面で物体を挟み込み、把持することを特徴とする非平行4節リンク型グリッパ。
【請求項5】
駆動軸によって回動されるウォームギアと、
前記ウォームギアに噛合すると共に、それぞれの回転軸が前記対偶点P3を経て前記第1のリンク部材に連結されているウォームホイールと、
で構成され、
前記駆動軸の回動によって2つの前記指部材が開閉するようになっている請求項4に記載の非平行4節リンク型グリッパ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットのアーム先端に装着される指機構を備えるグリッパの機構に関し、特に非平行4節リンク型の指機構及びグリッパに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
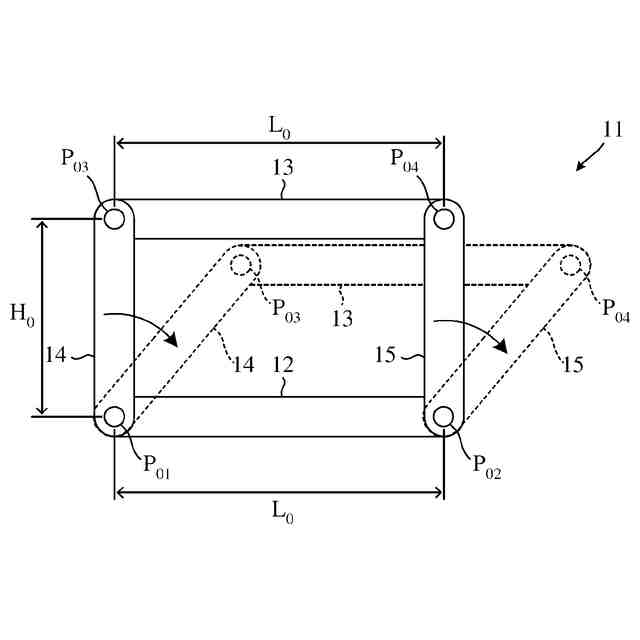
図1は、アーム2の先端にグリッパ10を有するアームロボット1の一例を示しており、物体を把持するグリッパ10には、一般的に図2に示すような平行4節リンク機構11を駆動機構とした構成のものを用いることが多い(例えば特許文献1~4)。即ち、平行四辺形を構成する4個の長形状のリンク部材12~15は、4つの対偶点P
01
~P
04
で回動自在に係合されており、水平方向のリンク部材12の対偶点P
01
と対偶点P
02
の距離L
0
は、対向するリンク部材13の対偶点P
03
と対偶点P
04
の距離L
0
と同一であり、垂直方向のリンク部材14の対偶点P
01
と対偶点P
03
の距離H
0
は、対向するリンク部材15の対偶点P
02
と対偶点P
04
の距離H
0
と同一である。従って、リンク部材12~15は、対偶点P
01
~P
04
により常に平行四辺形を維持されて駆動されるので、例えばリンク部材15に連結された可動指部材は、図3(A)及び(B)に示すように、対になっている対称型の可動指部材16A、16Bと連動して常に平行に移動し、平行動作によって物体3を把持したり、解放したりする。
【0003】
図3(A)及び(B)は、平行4節リンク機構が対(上側Aと下側B)になっているグリッパを示しており、リンク部材15A及び15Bにそれぞれ可動指部材16A及び16Bが取り付けられ、図3(A)の状態からリンク部材12A及び12Bの回動により、可動指部材16A及び16Bの平行移動で物体3を把持するようになっている。図3(B)はグリッパが、物体3を把持した状態を示している。
【先行技術文献】
【特許文献】
【0004】
特開2011-73099号公報
特開2020-82239号公報
特開2021-133444号公報
特開2023-488113号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のような平行4節リンク機構11を用いた従来のグリッパは、指先が常に平行に動くため、物体を把持し易い利点を有している反面、壁を強く押すなどの動作を行う場合、指先が壁に当たってしまい、指が損傷したり破壊されたりする問題がある。また、重量のある大きな物体などを支えるといった動作を行うことができない問題もある。また、指が開閉する間隙よりも大きなものを把持できない問題もある。
【0006】
本発明は上述の理由によりなされたものであり、本発明の目的は、4節リンクを非平行とすることにより、入力角が小さい領域ではほぼ平行動作で物体を把持でき、入力角が大きくなった状態をも実現できると共に、指部材を後方に下げた状態で物体などを支えることも可能なロボットの指機構及びグリッパを提供することにある。
【課題を解決するための手段】
【0007】
本発明は非平行4節リンク型指機構に関し、本発明の上記目的は、回動自在の対偶点P1及びP2に接続された第1のリンク部材と、回動自在の対偶点P3及びP4に接続された第2のリンク部材と、前記対偶点P2及びP4に装着された可動指部材とで構成され、前記対偶点P1及びP3が前記本体での固定点であり、前記4つの対偶点P1、P2、P3、P4を結ぶ四角形が平行四辺形を構成せず、前記第1のリンク部材を前記対偶点P1周りに回動させるか、若しくは前記第2のリンク部材を前記対偶点P3周りに回動させることで、前記可動指部材を運動させることにより達成される。また、前記対偶点P3及びP4の距離が、前記対偶点P1及びP2の距離に対して比率0.3~1.0であることにより、或いは前記可動指部材の把持面と前記対偶点1と前記対偶点2が同一直線状にある姿勢において、前記第1のリンク部材から前記対偶点P3までの距離が、前記第1のリンク部材から前記対偶点P4までの距離に対して、比率0.7~1.4であることにより、より効果的に達成される。
【0008】
更に、本発明は非平行4節リンク型グリッパに関し、本発明の上記目的は、上記いずれかに記載の非平行4節リンク型指機構を面対称に2つ配置するように構成され、対向する2つの前記可動指部材の把持面で物体を挟み込み、把持することにより達成され、駆動軸によって回動されるウォームギアと、前記ウォームギアに噛合すると共に、それぞれの回転軸が前記対偶点P3を経て前記第1のリンク部材に連結されているウォームホイールとで構成され、前記駆動軸の回動によって2つの前記指部材が開閉するようになっていることにより、より効果的に達成される。
【発明の効果】
【0009】
本発明の非平行4節リンク型指機構及びグリッパによれば、指部材の開度が小さい領域ではほぼ平行な動作で物体を容易に把持できると共に、開度の大きな状態も容易に実現でき、指部材を後方に下げた状態で物体などを支えることも可能となる。
【0010】
そのため、物体を把持する以外に、指部材を損傷することなく、壁を強く押すなどの動作や重量のある大きな物体などを支えるといった動作を行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ