TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024122294
公報種別
公開特許公報(A)
公開日
2024-09-09
出願番号
2023029757
出願日
2023-02-28
発明の名称
移動装置
出願人
日本電業工作株式会社
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20240902BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】第1の方向に作用部を作用させる第1の状態と、第2の方向に作用部を作用させる第2の状態とを切り替え可能な移動装置において、第1の状態における作用部の遊びの確保と第2の状態における作用部のふらつきの低減とを両立する。
【解決手段】移動装置は、対象物の方向を向くことで対象物に作用可能な作用部と、地面を走行して自装置を移動させる車両部と、多節リンク構造を有し、作用部と車両部とをつなぐリンク構造部と、を備え、リンク構造部は、多節リンク構造が死点の状態であり、作用部が第1の方向を向いて、作用部の配置の変化を許容する第1の状態と、多節リンク構造が死点の状態ではなく、作用部が第2の方向を向いて、作用部の配置の変化を許容しない第2の状態と、を切り替え可能に構成される。
【選択図】図5
特許請求の範囲
【請求項1】
対象物の方向を向くことで当該対象物に作用可能な作用部と、
地面を走行して自装置を移動させる車両部と、
多節リンク構造を有し、前記作用部と前記車両部とをつなぐリンク構造部と、を備え、
前記リンク構造部は、
前記多節リンク構造が死点の状態であり、前記作用部が第1の方向を向いて、当該作用部の配置の変化を許容する第1の状態と、
前記多節リンク構造が死点の状態ではなく、前記作用部が第2の方向を向いて、当該作用部の配置の変化を許容しない第2の状態と、を切り替え可能に構成される
ことを特徴とする移動装置。
続きを表示(約 560 文字)
【請求項2】
前記作用部は、前記作用として、前記第1の方向または前記第2の方向に存在する対象物を検知することを特徴とする、請求項1に記載の移動装置。
【請求項3】
前記作用部は、
前記第1の状態において、前記車両部の走行する地面上の、当該車両部の進行方向を示すラインを検知し、
前記第2の状態において、前記車両部の進行方向に存在する障害物を検知する
ことを特徴とする、請求項2に記載の移動装置。
【請求項4】
前記多節リンク構造は、前記車両部に固定される第1のアームと、前記作用部が取り付けられる第2のアームと、第3のアームと、第4のアームとを、この順に連結して環状とした4節リンク構造であることを特徴とする、請求項1に記載の移動装置。
【請求項5】
前記リンク構造部は、前記第1のアームの軸間距離と前記第3のアームの軸間距離とが等しく、かつ、前記第2のアームの軸間距離と前記第4のアームの軸間距離とが等しくなるように構成されることを特徴とする、請求項4に記載の移動装置。
【請求項6】
前記第1のアームと前記第2のアームとは、前記多節リンク構造の前記環状の外側へ屈曲する屈曲部を有することを特徴とする、請求項5に記載の移動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動装置に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
特許文献1には、走行路に敷設されたガイドラインを車体に備えたガイドセンサーで検知し、ガイドセンサーの信号により操舵されて走行する無人搬送車において、それぞれの車輪の中央前後に延出したアームにガイドセンサーを設けることが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平2-50705号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
無人搬送車(AGV:Automatic Guided Vehicle)等の移動装置において、装置から伸びるアームの先端に取り付けられた作用部の向きを変化させ、作用部を異なる方向に位置する対象物に対して作用させる場合がある。例えば、アームの先端にセンサを取り付け、センサを移動装置の進行方向に向けた状態と、センサを地面の方向に向けた状態と、を切り替え、進行方向に存在する障害物等と地面に引かれたラインとを検知可能とする場合がある。この場合、センサを進行方向に向けた状態では、測定精度の確保等の理由により、作用部のふらつきを低減することが求められる。一方、センサを地面の方向に向けた状態では、例えば地面に凹凸や傾き等があってもセンサを向けた状態を維持できるように、センサの遊びの確保が求められる。
本発明の目的は、第1の方向に作用部を作用させる第1の状態と、第2の方向に作用部を作用させる第2の状態とを切り替え可能な移動装置において、第1の状態における作用部の遊びの確保と第2の状態における作用部のふらつきの低減とを両立することにある。
【課題を解決するための手段】
【0005】
請求項1に記載の発明は、対象物の方向を向くことで当該対象物に作用可能な作用部と、地面を走行して自装置を移動させる車両部と、多節リンク構造を有し、前記作用部と前記車両部とをつなぐリンク構造部と、を備え、前記リンク構造部は、前記多節リンク構造が死点の状態であり、前記作用部が第1の方向を向いて、当該作用部の配置の変化を許容する第1の状態と、前記多節リンク構造が死点の状態ではなく、前記作用部が第2の方向を向いて、当該作用部の配置の変化を許容しない第2の状態と、を切り替え可能に構成されることを特徴とする移動装置である。
請求項2に記載の発明は、前記作用部は、前記作用として、前記第1の方向または前記第2の方向に存在する対象物を検知することを特徴とする、請求項1に記載の移動装置である。
請求項3に記載の発明は、前記作用部は、前記第1の状態において、前記車両部の走行する地面上の、当該車両部の進行方向を示すラインを検知し、前記第2の状態において、前記車両部の進行方向に存在する障害物を検知することを特徴とする、請求項2に記載の移動装置である。
請求項4に記載の発明は、前記多節リンク構造は、前記車両部に固定される第1のアームと、前記作用部が取り付けられる第2のアームと、第3のアームと、第4のアームとを、この順に連結して環状とした4節リンク構造であることを特徴とする、請求項1に記載の移動装置である。
請求項5に記載の発明は、前記リンク構造部は、前記第1のアームの軸間距離と前記第3のアームの軸間距離とが等しく、かつ、前記第2のアームの軸間距離と前記第4のアームの軸間距離とが等しくなるように構成されることを特徴とする、請求項4に記載の移動装置である。
請求項6に記載の発明は、前記第1のアームと前記第2のアームとは、前記多節リンク構造の前記環状の外側へ屈曲する屈曲部を有することを特徴とする、請求項5に記載の移動装置である。
【発明の効果】
【0006】
本発明によれば、第1の方向に作用部を作用させる第1の状態と、第2の方向に作用部を作用させる第2の状態とを切り替え可能な移動装置において、第1の状態における作用部の遊びの確保と第2の状態における作用部のふらつきの低減とを両立した移動装置が提供される。
【図面の簡単な説明】
【0007】
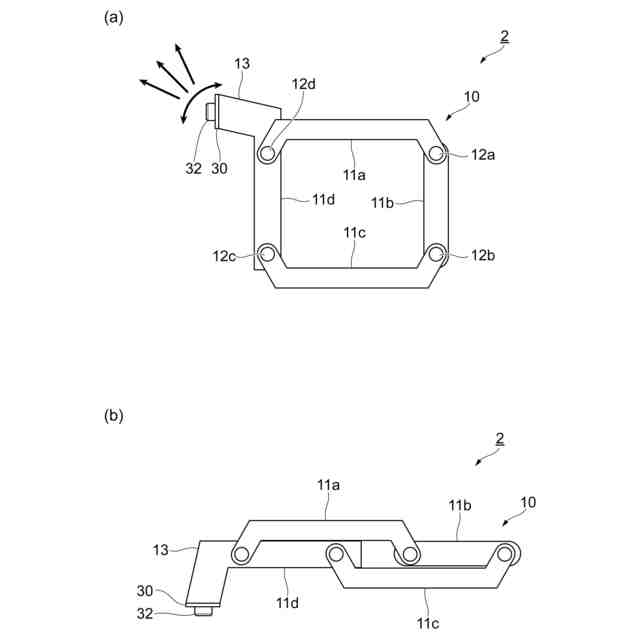
従来の移動装置を説明するための図であり、(a)はアームに蝶番を設けた従来の移動装置の概略図、(b)は蝶番を有しないアームを備える従来の移動装置の概略図である。
車両部とアームとの間を回転軸によって接続した従来の移動装置を説明する図であり、(a)はライントレースモードにおける移動装置の概略図、(b)は近接覚モードにおける移動装置の概略図である。
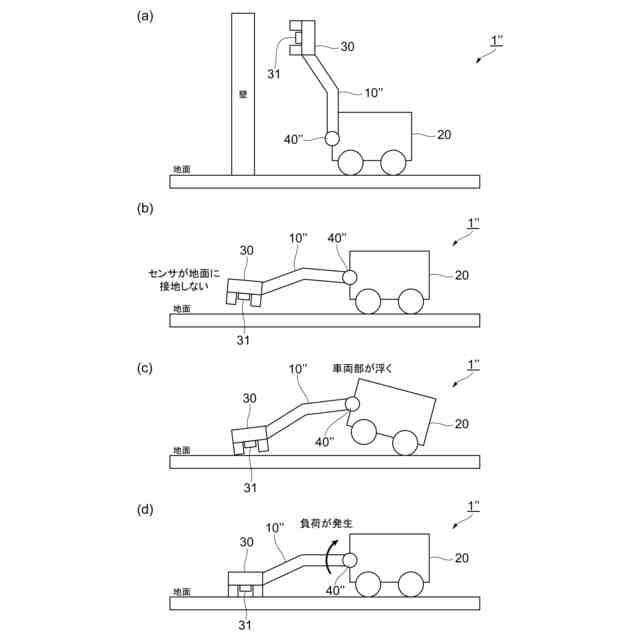
車両部とアームとの間を回転軸によって接続した従来の移動装置を説明する図であり、(a)は近接覚モードにおける移動装置の概略図、(b)~(d)はライントレースモードにおける移動装置の概略図である。
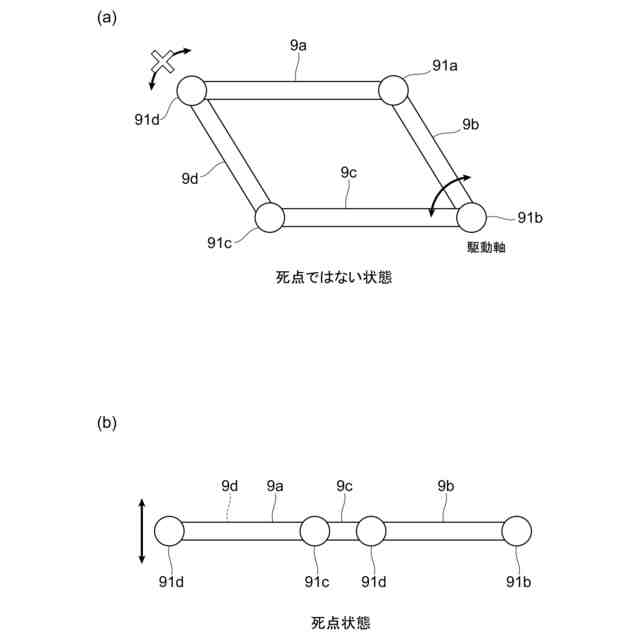
4節リンク構造を説明する図であり、(a)は4節リンク構造が死点ではない状態の概略図、(b)は4節リンク構造の死点状態の概略図である。
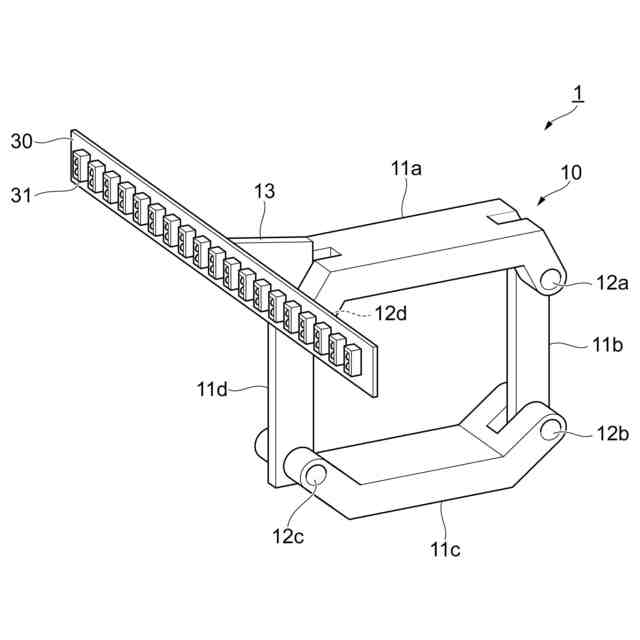
第1の実施の形態が適用される移動装置の斜視図である。
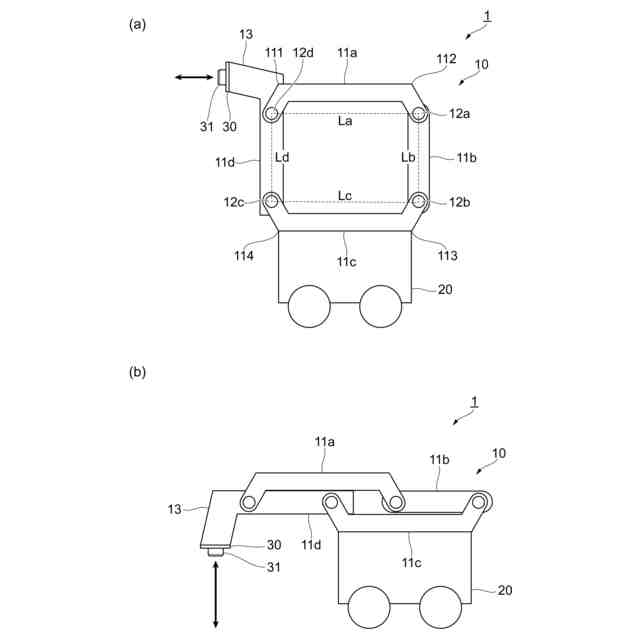
第1の実施の形態が適用される移動装置における近接覚モードとライントレースモードとの切り替えについて説明する図であり、(a)は近接覚モードの概略図、(b)はライントレースモードの概略図である。
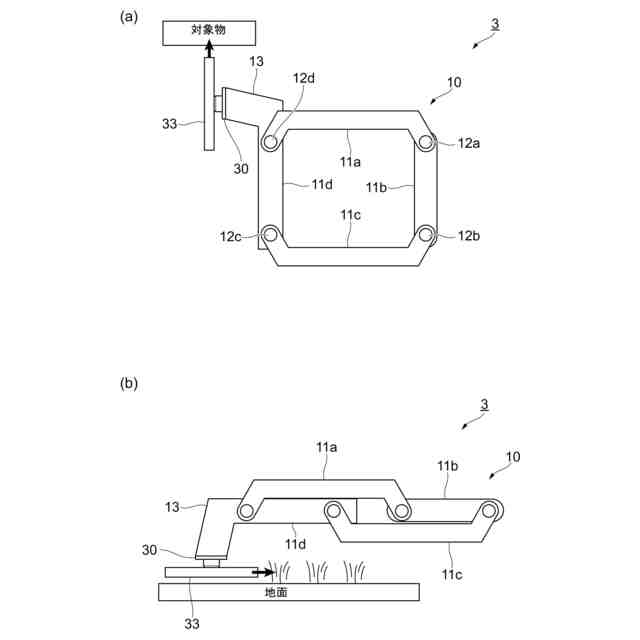
第2の実施の形態が適用される移動装置について説明する図であり、(a)は移動装置を空中のレーダー測定に利用する場合の概略図、(b)は移動装置を地中のレーダー測定に利用する場合の概略図である。
第3の実施の形態が適用される移動装置について説明する図であり、(a)は移動装置を地面の方向以外に存在する対象物の切断に利用する場合の概略図、(b)は移動装置を地面の方向に存在する対象物の切断に利用する場合の概略図である。
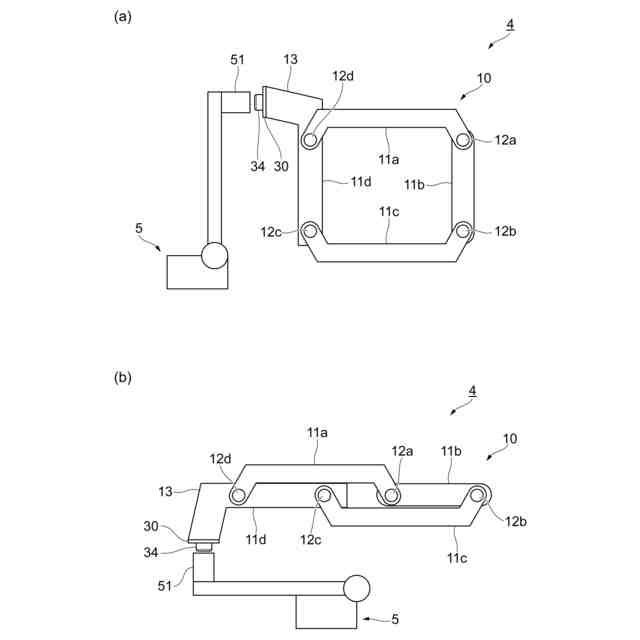
第4の実施の形態が適用される移動装置について説明する図であり、(a)は移動装置が他装置と接続される場合の概略図、(b)は接続後の移動装置と他装置との位置関係が変化した場合の概略図である。
5節リンク構造を有する応用例のリンク構造部を説明する図であり、(a)は5節リンク構造が死点ではない状態の概略図、(b)は5節リンク構造が死点状態の概略図である。
【発明を実施するための形態】
【0008】
以降、添付図面を参照して、本発明の実施の形態について詳細に説明する。
<従来の技術>
まず、本発明の実施の形態を説明する前に、本発明の実施の形態が適用されない従来の技術について、図1~図3を用いて説明する。
図1は、従来の移動装置1′,1″を説明するための図であり、(a)はアーム10′に蝶番13′を設けた従来の移動装置1′の概略図、(b)は蝶番を有しないアーム10″を備える従来の移動装置1″の概略図である。
【0009】
移動装置1′,1″は、地面を走行して自装置を移動させる車両部20と、車両部20から伸びるアーム10′,10″と、アーム10′,10″の先端に設けられた取付部30とを有している。
取付部30には、対象物の検知(センシング)を行うセンサ31が取り付けられている。このセンサ31によって地面に引かれたライン(不図示)を検知することで、移動装置1′,1″は、ラインに沿って移動することができる。なお、移動装置がセンサ31を地面の方向に向け、地面のラインを検知することを「ライントレース」と呼び、移動装置がライントレースを行う状態を「ライントレースモード」と呼ぶ場合がある。
【0010】
図1(a)に示すように、移動装置1′のアーム10′は、2本の棒状部材11′,12′が蝶番13′によって接続された構造を有し、棒状部材11′,12′のなす角度が調整可能になっている。
一方、図1(b)に示すように、移動装置1″のアーム10″は、蝶番を有さず、1本の棒状部材によって構成されている。
移動装置1′,1″は、アーム10′,10″を地面に向けて伸ばし、センサ31を地面に沿わせながら走行することで、ライントレースを行うことができる。なお、取付部30におけるセンサ31の周囲には、ライントレースを行う場合に、センサ31と地面との間に予め定められた距離を確保しつつ、地面に対する摺動性を確保する摺動部材が取り付けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
11日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
4日前
株式会社マキタ
電動工具
19日前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社ダイヘン
搬送装置
3か月前
日本車輌製造株式会社
締め付け工具
19日前
川崎重工業株式会社
ロボットリスト
19日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボットアーム
19日前
川崎重工業株式会社
ロボットアーム
19日前
日本信号株式会社
作業機制御システム
4日前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
ロボットシステム
19日前
CKD株式会社
吸着型搬送装置
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
5日前
株式会社安川電機
ロボット
1か月前
株式会社アイエイアイ
グリッパー
2か月前
長堀工業株式会社
締結装置
1か月前
株式会社マキタ
集塵アタッチメント
4日前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社スター精機
ワーク搬送装置
8日前
株式会社アマダ
磁気吸着装置
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
20日前
株式会社マキタ
電動作業機
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































