TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035204
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142100
出願日
2023-09-01
発明の名称
ロボットシステムおよび製造方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/06 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 操作端末を備えたロボットシステムにおいて、ロボットシステムの周囲への干渉を抑制しつつ、端末の視認性を向上させることを目的とする。
【解決手段】 複数の関節を有するロボットと、前記ロボットが載置される架台と、前記ロボットの状態を表示する端末と、を備えたロボットシステムであって、前記端末は、前記架台の上面と、前記複数の関節のうち前記架台に最も近い位置に配置された第1関節と、の間に配置されることを特徴とするロボットシステム。
【選択図】 図6
特許請求の範囲
【請求項1】
複数の関節を有するロボットと、前記ロボットが載置される架台と、前記ロボットの状態を表示する端末と、を備えたロボットシステムであって、
前記端末は、前記架台の上面と、前記複数の関節のうち前記架台に最も近い位置に配置された第1関節と、の間に配置されることを特徴とするロボットシステム。
続きを表示(約 810 文字)
【請求項2】
前記ロボットは基部を有し、
前記端末は、前記基部から、前記ロボットの可動範囲の半径の0.6倍以下の位置に配置されることを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記端末は、前記ロボットの動作条件に基づいた位置に配置され、
前記動作条件は、前記ロボットに教示された動作条件であることを特徴とする請求項1に記載のロボットシステム。
【請求項4】
前記端末は、前記ロボットの動作条件に基づいた位置に配置され、
前記動作条件は、前記ロボットが機械学習して動作する動作条件であることを特徴とする請求項1に記載のロボットシステム。
【請求項5】
前記ロボットは基部を有し、
前記基部と前記端末との距離は、前記第1関節と、前記第1関節に隣接し前記第1関節より前記ロボットの手先側に設けられた第2関節との距離より小さいことを特徴とする請求項1に記載のロボットシステム。
【請求項6】
前記基部と前記端末との距離は、前記第2関節における前記ロボットの腕部の太さより小さいことを特徴とする請求項5に記載のロボットシステム。
【請求項7】
前記ロボットは基部を有し、
前記基部と前記端末との距離は、前記端末の幅より小さいことを特徴とする請求項1に記載のロボットシステム。
【請求項8】
前記端末は、前記ロボットの可動範囲より内側に配置されることを特徴とする請求項1に記載のロボットシステム。
【請求項9】
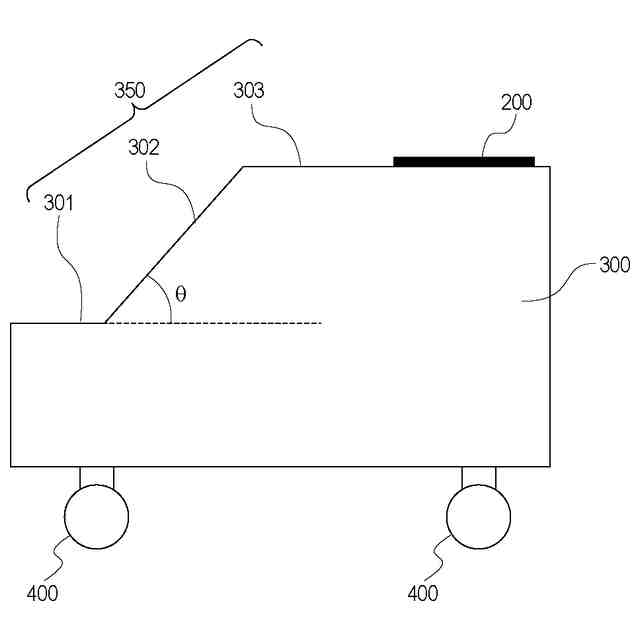
前記架台の上面は、傾斜面を含むことを特徴とする請求項1に記載のロボットシステム。
【請求項10】
前記傾斜面に前記端末を設けることを特徴とする請求項9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムおよび製造方法に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
近年、ロボットやロボットアームが利用される場面、環境が拡大してきている。従来、ロボットアームの利用の場面は、1つの製品の大量生産を前提として、自動化された工場の製造ライン上で、単純な動作を繰り返す場面であり、ロボットが使用される環境は限定的であった。
【0003】
それに対して、今まで人が行っていた作業を代替して、複数の製品を少量生産する場面で利用することや、人と協働して作業をすることが求められている。その際、ロボットアームを架台に乗せて、作業台の近傍に持ち運んで、作業を実施する事も行われている。
【0004】
特許文献1には、ロボットアームが架台に載置され、ロボットの作業領域と客が存在する領域との境界として機能する作業台に入出力装置が取り付けられた形態が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2022-150687号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
1つのロボットが移動することで複数の作業を実施するロボットの場合、移動先の作業内容に応じて周囲の環境が変わるため、操作端末は大きな画面を有しあらゆる方向から視認、操作可能ことが望ましい。
【0007】
しかしながら、大画面の操作端末はロボットやワークとの干渉を低減するように、作業位置から離れた位置に配置されたり、ロボットとの間に安全柵が設置され、視認性が高いものとは言えなかった。
【0008】
そこで本発明は、操作端末を備えたロボットシステムにおいて、ロボットシステムと操作端末との干渉を抑制しつつ、操作端末の視認性を向上させることを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するための手段は、複数の関節を有するロボットと、前記ロボットが載置される架台と、前記ロボットの状態を表示する端末と、を備えたロボットシステムであって、前記端末は、前記架台の上面と、前記複数の関節のうち前記架台に最も近い位置に配置された第1関節と、の間に配置されることを特徴とする。
【発明の効果】
【0010】
操作端末を備えたロボットシステムにおいて、ロボットシステムの周囲への干渉を抑制しつつ、端末の視認性を向上させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
8日前
キヤノン株式会社
トナー
17日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
17日前
キヤノン株式会社
電子機器
15日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
撮像装置
9日前
キヤノン株式会社
電子機器
11日前
キヤノン株式会社
記録装置
9日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
培養装置
22日前
キヤノン株式会社
電子機器
今日
キヤノン株式会社
培養装置
22日前
キヤノン株式会社
培養装置
22日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
定着装置
22日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
プログラム
17日前
キヤノン株式会社
プログラム
17日前
キヤノン株式会社
プログラム
17日前
キヤノン株式会社
画像形成装置
22日前
キヤノン株式会社
映像表示装置
11日前
キヤノン株式会社
推論処理装置
7日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
情報処理装置
7日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像読取装置
22日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像読取装置
8日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ