TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035357
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142343
出願日
2023-09-01
発明の名称
ロボット制御装置、ロボット制御方法、及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
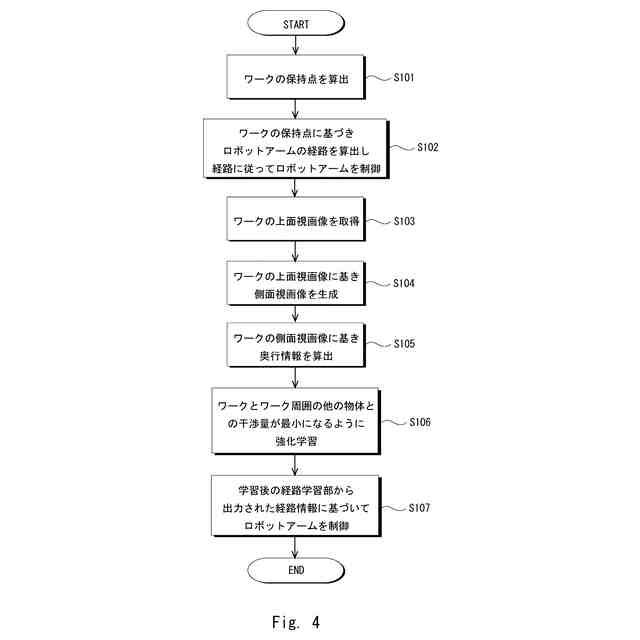
【課題】ワークの保持をより確実にしつつ、作業の煩雑化を抑制できること。
【解決手段】ロボット制御装置は、ワークの上面視画像を取得する画像取得部と、画像取得部により取得されたワークの上面視画像に基づいて、ワークの側面視画像を生成する画像生成ネットワークと、画像生成ネットワークにより生成されたワークの側面視画像に基づいて、ワークの奥行情報を取得する奥行情報取得部と、ワークの奥行情報とロボットアームの関節情報と、を入力情報とし、ロボットアームがワークを保持し持ち上げるまでのロボットアームの経路情報を出力情報とし、ロボットアームがワークを保持し持ち上げるまでにおける、ワークとワーク周囲の他の物体との干渉量が最小になるように強化学習する経路学習部と、学習後の経路学習部から出力されたロボットアームの経路情報に基づいて、ロボットアームを制御する制御部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ワークを保持し持ち上げるようにロボットアームを制御するロボット制御装置であって、
前記ワークの上面視画像を取得する画像取得部と、
前記画像取得部により取得されたワークの上面視画像に基づいて、前記ワークの側面視画像を生成する画像生成ネットワークと、
前記画像生成ネットワークにより生成されたワークの側面視画像に基づいて、前記ワークの奥行情報を取得する奥行情報取得部と、
前記ワークの奥行情報と前記ロボットアームの関節情報と、を入力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでの該ロボットアームの経路情報を出力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでにおける、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように強化学習する経路学習部と、
前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御する制御部と、
を備える、
ロボット制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1記載のロボット制御装置であって、
前記制御部は、前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて前記ワークを保持し持ち上げるように前記ロボットアームを制御し、
前記経路学習部は、該ロボットアームがワークを保持し持ち上げたときの前記ロボットアームの関節情報と、前記ワークの奥行情報とを入力情報として、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように再学習し、
前記制御部は、前記再学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御する、
ロボット制御装置。
【請求項3】
請求項1又は2記載のロボット制御装置であって、
前記画像生成ネットワークは、敵対的生成ネットワークとして構成されている、
ロボット制御装置。
【請求項4】
ワークを保持し持ち上げるようにロボットアームを制御するロボット制御方法であって、
前記ワークの上面視画像を取得するステップと、
前記取得されたワークの上面視画像に基づいて、前記ワークの側面視画像を生成するステップと、
前記生成されたワークの側面視画像に基づいて、前記ワークの奥行情報を取得するステップと、
前記ワークの奥行情報と前記ロボットアームの関節情報と、を入力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでの該ロボットアームの経路情報を出力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでにおける、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように経路学習部により強化学習するステップと、
前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御するステップと、
を含む、
ロボット制御方法。
【請求項5】
ワークを保持し持ち上げるようにロボットアームを制御するプログラムであって、
前記ワークの上面視画像に基づいて、前記ワークの側面視画像を生成する処理と、
前記生成されたワークの側面視画像に基づいて、前記ワークの奥行情報を取得する処理と、
前記ワークの奥行情報と前記ロボットアームの関節情報と、を入力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでの該ロボットアームの経路情報を出力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでにおける、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように経路学習部により強化学習する処理と、
前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御する処理と、
をコンピュータに実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットアームを制御するロボット制御装置、ロボット制御方法、及びプログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
ワークの重心位置に基づいてワークの種類を判別し、判別したワーク種類に適した保持方法で保持を行うロボット制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-067995号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記ロボット制御装置においては、上記ワーク種類に適した保持方法で保持を行うことで、そのワークをより確実に保持することが可能である。しかしながら、その保持を行う前に、ロボットに対してティーチングを行う必要があるため、ワークの種類が増えるとその分のティーチング作業が増え、作業が煩雑化する虞がある。
【0005】
本開示は、このような問題点を解決するためになされたものであり、ワークの保持をより確実にしつつ、作業の煩雑化を抑制できるロボット制御装置、ロボット制御方法、及びプログラムを提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本開示の一態様は、
ワークを保持し持ち上げるようにロボットアームを制御するロボット制御装置であって、
前記ワークの上面視画像を取得する画像取得部と、
前記画像取得部により取得されたワークの上面視画像に基づいて、前記ワークの側面視画像を生成する画像生成ネットワークと、
前記画像生成ネットワークにより生成されたワークの側面視画像に基づいて、前記ワークの奥行情報を取得する奥行情報取得部と、
前記ワークの奥行情報と前記ロボットアームの関節情報と、を入力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでの該ロボットアームの経路情報を出力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでにおける、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように強化学習する経路学習部と、
前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御する制御部と、
を備える、
ロボット制御装置
である。
この一態様において、前記制御部は、前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて前記ワークを保持し持ち上げるように前記ロボットアームを制御し、
前記経路学習部は、該ロボットアームがワークを保持し持ち上げたときの前記ロボットアームの関節情報と、前記ワークの奥行情報とを入力情報として、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように再学習し、
前記制御部は、前記再学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御してもよい。
この一態様において、前記画像生成ネットワークは、敵対的生成ネットワークとして構成されていてもよい。
上記目的を達成するための本開示の一態様は、
ワークを保持し持ち上げるようにロボットアームを制御するロボット制御方法であって、
前記ワークの上面視画像を取得するステップと、
前記取得されたワークの上面視画像に基づいて、前記ワークの側面視画像を生成するステップと、
前記生成されたワークの側面視画像に基づいて、前記ワークの奥行情報を取得するステップと、
前記ワークの奥行情報と前記ロボットアームの関節情報と、を入力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでの該ロボットアームの経路情報を出力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでにおける、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように経路学習部により強化学習するステップと、
前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御するステップと、
を含む、
ロボット制御方法
である。
上記目的を達成するための本開示の一態様は、
ワークを保持し持ち上げるようにロボットアームを制御するプログラムであって、
前記ワークの上面視画像に基づいて、前記ワークの側面視画像を生成する処理と、
前記生成されたワークの側面視画像に基づいて、前記ワークの奥行情報を取得する処理と、
前記ワークの奥行情報と前記ロボットアームの関節情報と、を入力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでの該ロボットアームの経路情報を出力情報とし、前記ロボットアームが前記ワークを保持し持ち上げるまでにおける、前記ワークと該ワーク周囲の他の物体との干渉量が最小になるように経路学習部により強化学習する処理と、
前記学習後の経路学習部から出力された前記ロボットアームの経路情報に基づいて、該ロボットアームを制御する処理と、
をコンピュータに実行させる、プログラム
である。
【発明の効果】
【0007】
本開示によれば、ワークの保持をより確実にしつつ、作業の煩雑化を抑制できるロボット制御装置、ロボット制御方法、及びプログラムを提供することができる。
【図面の簡単な説明】
【0008】
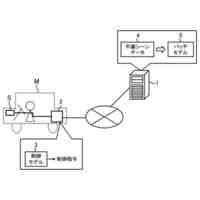
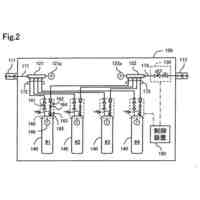
本実施形態に係るロボットシステムの概略的なシステム構成を示すブロック図である。
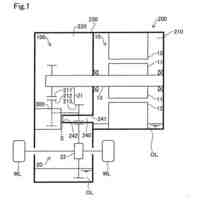
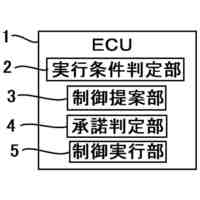
本実施形態に係るロボット制御装置の概略的なシステム構成を示すブロック図である。
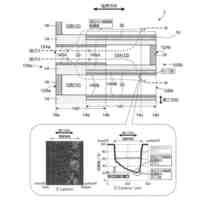
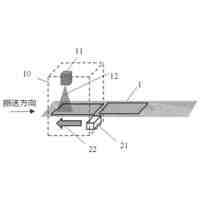
ワークの上面視画像、側面視画像及び奥行情報の一例を示す図である。
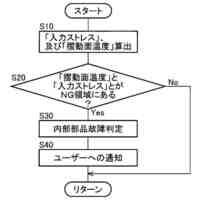
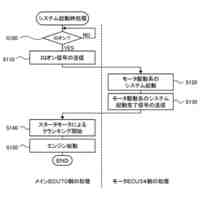
本実施形態に係るロボット制御方法のフローを示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照して本実施形態について説明する。図1は、本実施形態に係るロボットシステムの概略的なシステム構成を示すブロック図である。本実施形態に係るロボット制御装置1は、例えば、所定位置に配置されたワークを保持し持ち上げ、目的位置に移動させるようにロボットアーム2を制御するものである。
【0010】
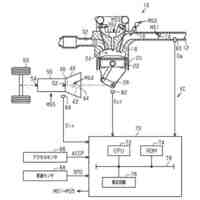
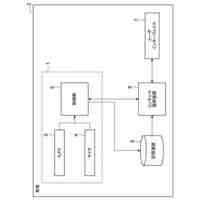
ロボット制御装置1は、例えば、CPU(Central Processing Unit)やGPU(Graphics Processing Unit)などのプロセッサ1aと、RAM(Random Access Memory)やROM(Read Only Memory)などの内部メモリ1bと、HDD(Hard Disk Drive)やSDD(Solid State Drive)などのストレージデバイス1cと、ディスプレイなどの周辺機器を接続するための入出力I/F1dと、装置外部の機器と通信を行う通信I/F1eと、を備えた通常のコンピュータのハードウェア構成を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
収容ケース
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
電極積層装置
今日
トヨタ自動車株式会社
動力伝達装置
今日
トヨタ自動車株式会社
車載空調装置
今日
トヨタ自動車株式会社
乗降支援装置
今日
トヨタ自動車株式会社
電極の製造方法
今日
トヨタ自動車株式会社
電極の製造方法
今日
トヨタ自動車株式会社
車両の制御装置
今日
トヨタ自動車株式会社
電極の製造方法
今日
トヨタ自動車株式会社
モデル生成方法
今日
トヨタ自動車株式会社
車両の制御装置
今日
トヨタ自動車株式会社
排ガス浄化装置
今日
トヨタ自動車株式会社
蓄電モジュール
今日
トヨタ自動車株式会社
ハイブリッド車
今日
トヨタ自動車株式会社
バッテリパック
今日
トヨタ自動車株式会社
燃料電池システム
今日
トヨタ自動車株式会社
ハイブリッド車両
今日
トヨタ自動車株式会社
車両用動力伝達軸
今日
トヨタ自動車株式会社
路面状態予測装置
今日
トヨタ自動車株式会社
ドライバ撮像装置
今日
トヨタ自動車株式会社
異音診断システム
今日
トヨタ自動車株式会社
運転支援制御装置
今日
トヨタ自動車株式会社
感情判定システム
今日
トヨタ自動車株式会社
電極体の製造方法
今日
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ