TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035399
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142415
出願日
2023-09-01
発明の名称
ドライバドリル及び震動ドライバドリル
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25F
5/02 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ドライバドリルの大型化を抑制しつつ、素子に接続するリード線を適切に保持すること。
【解決手段】ドライバドリルは、モータと、モータの前方に設けられ、モータにより駆動する出力部と、モータと出力部との間に配置された減速機構と、モータと減速機構との間に配置されるモータブラケットと、モータおよびモータブラケットを収容するハウジングと、モータまたは減速機構の上方に設けられた素子と、素子と接続され、モータまたは減速機構よりも下方に延びるリード線と、を備える。リード線がハウジングとモータブラケットとの間に挟み込まれている。
【選択図】図14
特許請求の範囲
【請求項1】
モータと、
前記モータの前方に設けられ、前記モータにより駆動する出力部と、
前記モータと前記出力部との間に配置された減速機構と、
前記モータと前記減速機構との間に配置されるモータブラケットと、
前記モータおよび前記モータブラケットを収容するハウジングと、
前記モータまたは前記減速機構の上方に設けられた素子と、
前記素子と接続され、前記モータまたは前記減速機構よりも下方に延びるリード線と、を備え、
前記リード線が前記ハウジングと前記モータブラケットとの間に挟み込まれている、
ドライバドリル。
続きを表示(約 1,100 文字)
【請求項2】
前記ハウジングの内表面に、前記リード線が配置される凹状部を有する、
請求項1に記載のドライバドリル。
【請求項3】
前記モータブラケットの外周に、前記凹状部へ向けて突出する凸部を有する、
請求項2に記載のドライバドリル。
【請求項4】
前記凸部は、前記モータブラケットの周方向に沿って第1凸部と第2凸部とを含み、
前記モータの回転軸からの半径方向において、前記回転軸から前記第1凸部の先端までの距離は、前記回転軸から前記第2凸部の先端までの距離よりも小さい、
請求項3に記載のドライバドリル。
【請求項5】
前記第1凸部は、前記モータブラケットの側面に配置され、
前記第2凸部は、前記第1凸部よりも前記モータブラケットの上方向又は下方向に配置される、
請求項4に記載のドライバドリル。
【請求項6】
前記出力部を震動させる震動機構をさらに備える
請求項1から4のいずれか1項に記載のドライバドリル。
【請求項7】
前記減速機構は、複数段変速であり、
前記ハウジングの上部に配置され、前記減速機構の減速比を切り替える速度切替レバーをさらに備え、
前記素子は、前記速度切替レバーによる減速比の切り替えを検出するセンサを含む、
請求項1から4のいずれか1項に記載のドライバドリル。
【請求項8】
前記素子は、前記モータの駆動状態を報知する報知ランプを含む、
請求項1から4のいずれか1項に記載のドライバドリル。
【請求項9】
前記素子は、操作入力を受け付ける操作スイッチを含む、
請求項1から4のいずれか1項に記載のドライバドリル。
【請求項10】
モータと、
前記モータの前方に設けられ、前記モータにより駆動する出力部と、
前記モータと前記出力部との間に配置された減速機構と、
前記減速機構と前記出力部との間に配置された震動機構と、
前記モータと前記減速機構との間に配置されるモータブラケットと、
前記モータおよび前記モータブラケットを収容するハウジングと、
前記モータまたは前記減速機構の上方に設けられた素子と、
前記素子と接続され、前記モータよりも下方に延びるリード線と、を備え、
前記リード線が前記モータブラケットに保持されている、
震動ドライバドリル。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、ドライバドリル及び震動ドライバドリルに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ドライバドリルに係る技術分野において、特許文献1に開示されているようなドライバドリルが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-171857号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本明細書で開示する技術は、外形寸法の大型化を抑制しつつ、素子に接続するリード線を適切に保持することを目的とする。
【課題を解決するための手段】
【0005】
本明細書は、ドライバドリルを開示する。ドライバドリルは、モータと、モータの前方に設けられ、モータにより駆動する出力部と、モータと出力部との間に配置された減速機構と、モータと減速機構との間に配置されるモータブラケットと、モータおよびモータブラケットを収容するハウジングと、モータまたは減速機構の上方に設けられた素子と、素子と接続され、モータまたは減速機構よりも下方に延びるリード線と、を備えてもよい。リード線がハウジングとモータブラケットとの間に挟み込まれていてもよい。
【0006】
また、本明細書は、震動ドライバドリルを開示する。震動ドライバドリルは、モータと、モータの前方に設けられ、モータにより駆動する出力部と、モータと出力部との間に配置された減速機構と、減速機構と出力部との間に配置された震動機構と、モータと減速機構との間に配置されるモータブラケットと、モータおよびモータブラケットを収容するハウジングと、モータまたは減速機構の上方に設けられた素子と、素子と接続され、モータよりも下方に延びるリード線と、を備えてもよい。リード線がモータブラケットに保持されていてもよい。
【0007】
また、震動ドライバドリルは、モータと、モータの前方に設けられ、モータにより駆動する出力部と、モータと出力部との間に配置された減速機構と、出力部と減速機構の間に配置される震動機構と、モータおよび減速機構を収容するハウジングと、モータおよび減速機構の上方に設けられた素子と、モータよりも下方に設けられ、素子とリード線を介して接続されたコントローラと、を備えてもよい。前後方向におけるモータと減速機構との間に、リード線を通過させる通路が設けられていてもよい。
【発明の効果】
【0008】
本明細書で開示する技術によれば、外形寸法の大型化を抑制しつつ、素子に接続するリード線を適切に保持できる。
【図面の簡単な説明】
【0009】
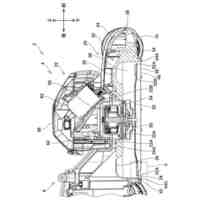
図1は、実施形態に係るドライバドリルを示す前方からの斜視図である。
図2は、実施形態に係るドライバドリルを示す後方からの斜視図である。
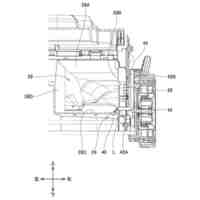
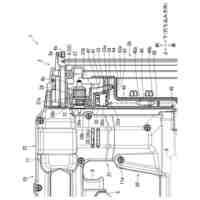
図3は、実施形態に係るドライバドリルを示す断面図である。
図4は、実施形態に係るドライバドリルの一部を示す断面図である。
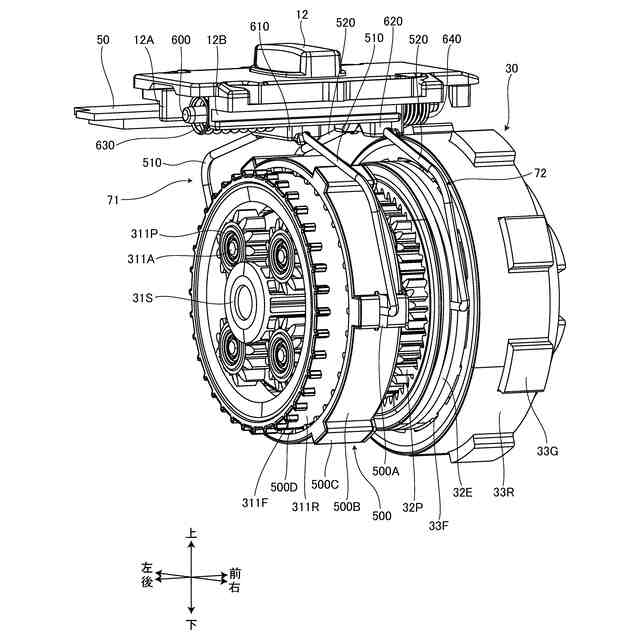
図5は、実施形態に係るモータ、モータブラケット及び減速機構を示す後方からの分解斜視図である。
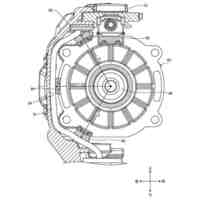
図6は、実施形態に係る減速機構の一部を示す後方からの斜視図である。
図7は、実施形態に係る減速機構を示す後方からの分解斜視図である。
図8は、実施形態に係る減速機構を示す前方からの分解斜視図である。
図9は、実施形態に係る速度切替レバーの移動構造を示す上方からの断面図である。
図10は、実施形態に係る震動機構を示す断面図である。
図11は、実施形態に係る左ハウジングとモータブラケットとを示す後方からの斜視図である。
図12は、実施形態に係るモータブラケットを示す後方からの斜視図である。
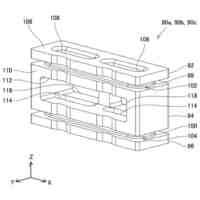
図13は、実施形態に係る左ハウジングの一部を示す斜視図である。
図14は、実施形態に係るリード線の通路を示す後方から前方への矢視断面図である。
図15は、実施形態に係るハンドルを装着した状態のドライバドリルを示す前方からの斜視図である。
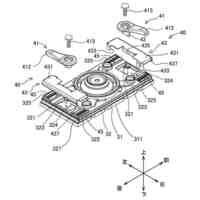
図16は、実施形態に係るハンドルの装着部を示す斜視説明図である。
図17は、実施形態に係るハンドルと装着部との係合を説明する後方から前方への矢視断面図である。
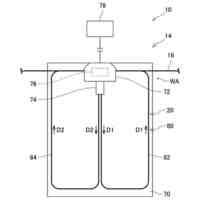
図18は、他の実施形態に係る素子を示す模式図である。
図19は、他の実施形態に係る素子を示す模式図である。
図20は、他の実施形態に係るモータブラケットを示す斜視図である。
図21は、他の実施形態に係るモータブラケットを示す左側面図である。
【発明を実施するための形態】
【0010】
1つ又はそれ以上の実施形態において、ドライバドリルは、モータと、モータの前方に設けられ、モータにより駆動する出力部と、モータと出力部との間に配置された減速機構と、モータと減速機構との間に配置されるモータブラケットと、モータおよびモータブラケットを収容するハウジングと、モータまたは減速機構の上方に設けられた素子と、素子と接続され、モータまたは減速機構よりも下方に延びるリード線と、を備えてもよい。リード線がハウジングとモータブラケットとの間に挟み込まれていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
ケース
21日前
株式会社マキタ
作業機
6日前
株式会社マキタ
作業機
20日前
株式会社マキタ
芝刈機
7日前
株式会社マキタ
作業機
6日前
株式会社マキタ
作業機
6日前
株式会社マキタ
サンダ
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
20日前
株式会社マキタ
打ち込み工具
今日
株式会社マキタ
作業ロボット
今日
株式会社マキタ
自律移動システム
今日
株式会社マキタ
電動作業機用モータ
6日前
株式会社マキタ
集塵アタッチメント
20日前
株式会社マキタ
回転工具用アクセサリ
6日前
株式会社マキタ
ドライバドリル及び震動ドライバドリル
今日
個人
腰袋
27日前
株式会社アイセイ
搬送装置
今日
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
20日前
国立大学法人金沢大学
ロボット
6日前
川崎重工業株式会社
ロボットアーム
1か月前
株式会社ケー・エフ・シー
締結構造
10日前
川崎重工業株式会社
ロボットリスト
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
日本車輌製造株式会社
締め付け工具
1か月前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
日本信号株式会社
作業機制御システム
20日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ