TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025024788
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129050
出願日
2023-08-08
発明の名称
ケーブル中継モジュール及び多関節ロボット
出願人
日本信号株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250214BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】回転に伴うケーブルのねじれを吸収し、配線する際の作業性を向上できるとともに、組立分解作業を容易化できるケーブル中継モジュール、及びこのケーブル中継モジュールを各関節に備える多関節ロボットを提供する。
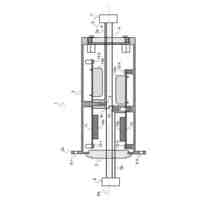
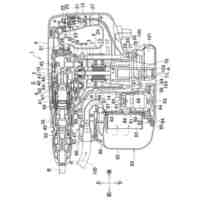
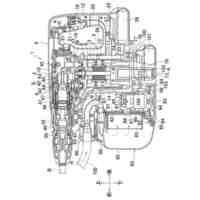
【解決手段】ケーブル中継モジュール1は、円筒状の筐体2と、ケーブル3と、ベアリング付支持具4と、モータ制御基板(内部実装基板)11,12と、コネクタ7,8とを備える。円筒状の筐体は、多関節ロボットの回転駆動ユニットの中空部に、回転軸RXに沿って設置される。ケーブルは、筐体の中心軸AXに沿って挿通される。ベアリング付支持具は、筐体の少なくとも一方の底面側に設置され、ケーブルを回動自在に支持する。モータ制御基板は、筐体に内蔵され、多関節ロボットの駆動モータを制御する。コネクタは、ケーブルの両端にそれぞれ設けられる。
【選択図】図1
特許請求の範囲
【請求項1】
多関節ロボットの回転駆動ユニットの中空部に、回転軸に沿って設置される円筒状の筐体と、
前記筐体の中心軸に沿って挿通されるケーブルと、
前記筐体の少なくとも一方の底面側に設置され、前記ケーブルを回動自在に支持するベアリング付支持具と、
前記筐体に内蔵され、多関節ロボットの駆動モータを制御する内部実装基板と、
前記ケーブルの両端にそれぞれ設けられるコネクタと
を備えるケーブル中継モジュール。
続きを表示(約 680 文字)
【請求項2】
前記筐体の他方の底面側を塞ぐように設置され、前記ケーブルを固定する固定具を更に備える、請求項1に記載のケーブル中継モジュール。
【請求項3】
前記筐体内に設けられ、前記ケーブルを前記筐体の中心軸に沿って支持するケーブルクランプを更に備える、請求項1に記載のケーブル中継モジュール。
【請求項4】
前記内部実装基板は、前記ケーブルの分岐配線を介して前記駆動モータを制御する制御信号を出力する、請求項1に記載のケーブル中継モジュール。
【請求項5】
請求項1に記載のケーブル中継モジュールを各関節に備える多関節ロボットであって、複数の前記ケーブル中継モジュールの前記ケーブルが前記コネクタで縦続接続され、前記内部実装基板に少なくとも一部が実装されたモータ制御装置から複数の前記ケーブル中継モジュールを経由して前記駆動モータに駆動信号が入力される、ことを特徴とする多関節ロボット。
【請求項6】
請求項2に記載のケーブル中継モジュールを各関節に備える多関節ロボットであって、複数の前記ケーブル中継モジュールの前記ケーブルが前記コネクタで縦続接続され、前記内部実装基板に少なくとも一部が実装されたモータ制御装置から複数の前記ケーブル中継モジュールを経由して前記駆動モータに駆動信号が入力され、
前記駆動信号は、各々の前記ケーブル中継モジュールにおける前記ベアリング付支持具側のコネクタから入力され、固定具側のコネクタから出力される、ことを特徴とする多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ケーブルのねじれを吸収するケーブル中継モジュール、及びこのケーブル中継モジュールを関節に用いた多関節ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、多関節ロボットにおける電源線や信号線等の配線、及びエア供給管等の配管は、リンク機構の中空状部にケーブルを通し、各リンク動作時のケーブルのねじれを中空状部で吸収する構造としている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開平7-328982号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、多関節ロボットの配線は、制御装置から作業を行う手先まで一筆書きのように連続して接続する必要があり、この配線はリンク機構の中空状部を挿通させている。このため、アーム駆動時に各関節の中空状部が回転してケーブルのねじれが発生するので、負荷をケーブルに集中させないように分散させる構造が必要になる。
【0005】
また、配線する際の作業性が悪い構造となっており、メインコントローラからモータ等のアクチュエータまでユニット単位で組み立てることができないため、組立や分解には専門の作業者が必要であり、急いで復旧させる場合には対応が難しい。
【0006】
本発明は上記のような事情に鑑みてなされたもので、その目的とするところは、回転に伴うケーブルのねじれを吸収し、配線する際の作業性を向上できるとともに、組立分解作業を容易化できるケーブル中継モジュール、及びこのケーブル中継モジュールを各関節に備える多関節ロボットを提供することにある。
【課題を解決するための手段】
【0007】
本発明に係るケーブル中継モジュールは、多関節ロボットの回転駆動ユニットの中空部に、回転軸に沿って設置される円筒状の筐体と、前記筐体の中心軸に沿って挿通されるケーブルと、前記筐体の少なくとも一方の底面側に設置され、前記ケーブルを回動自在に支持するベアリング付支持具と、前記筐体に内蔵され、多関節ロボットの駆動モータを制御する内部実装基板と、前記ケーブルの両端にそれぞれ設けられるコネクタとを備える。
【0008】
また、上記ケーブル中継モジュールを各関節に備える多関節ロボットであって、複数の前記ケーブル中継モジュールの前記ケーブルが前記コネクタで縦続接続され、モータ制御装置から複数の前記ケーブル中継モジュールを経由して前記駆動モータに駆動信号が入力される、ことを特徴とする。
【発明の効果】
【0009】
本発明では、筐体の少なくとも一方の底面側に設置したベアリング付支持具により、回転に伴うケーブルのねじれを吸収し、関節の回転に合わせて負荷をケーブルに集中させないように分散させることができる。また、ケーブルの両端にそれぞれコネクタを設けたことで、ユニット単位で組み立てることが可能となり、配線する際の作業性を向上できるとともに、組立分解作業を容易化して故障の際にも迅速に復旧できる。更に、筐体に内部実装基板を内蔵したことで、アクチュエータの近傍に制御装置を配置することができ、ノイズによる影響を低減できる。
【0010】
従って、本発明によれば、回転に伴うケーブルのねじれを吸収し、配線する際の作業性を向上できるとともに、組立分解作業を容易化できるケーブル中継モジュール、及びこのケーブル中継モジュールを各関節に備える多関節ロボットを提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本信号株式会社
ゲート装置
1日前
日本信号株式会社
運行管理システム
1日前
日本信号株式会社
作業機制御システム
1日前
日本信号株式会社
ケーブル中継モジュール及び多関節ロボット
1日前
個人
腰袋
8日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
16日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットリスト
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットアーム
16日前
日本車輌製造株式会社
締め付け工具
16日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
16日前
日本信号株式会社
作業機制御システム
1日前
ジヤトコ株式会社
圧入装置
29日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
2日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社マキタ
集塵アタッチメント
1日前
株式会社スター精機
ワーク搬送装置
5日前
トヨタ自動車株式会社
制御装置及び制御方法
16日前
モトコマ株式会社
寄せポンチホルダー
17日前
川崎重工業株式会社
ロボットシステム
8日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社DailyColor
ロボットハンド
17日前
有限会社松尾エンジニアリング
連結部材
17日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ