TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025872
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131078
出願日
2023-08-10
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
弁理士法人筒井国際特許事務所
主分類
B25C
1/00 20060101AFI20250214BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業機の利便性を向上させる。
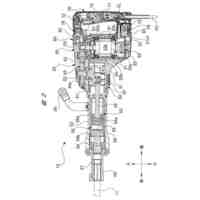
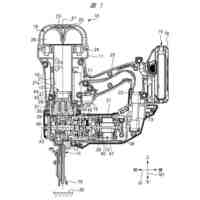
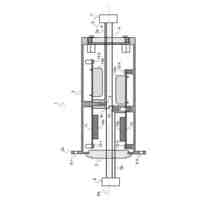
【解決手段】釘打機(作業機)1は、止具を支持する射出部7と、射出部7に支持された前記止具を打撃するドライバブレード32と、ドライバブレード32が装着されるプランジャ31と、ドライバブレード32を付勢して前記止具を打撃させるスプリング35と、を有する。さらに、釘打機1は、スプリング35を支持する本体ハウジング11と、射出部7に支持された前記止具が打撃されると新たな止具を射出部7に供給するマガジン部20と、を有する。マガジン部20は、複数種類の前記止具を支持可能であるとともに、射出部7に前記止具を供給可能であり、ドライバブレード32は、プランジャ31が本体ハウジング11に支持された状態で、プランジャ31に着脱可能である。
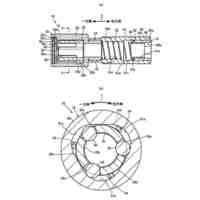
【選択図】図7
特許請求の範囲
【請求項1】
止具を支持する支持部と、
前記支持部に支持された前記止具の頭部を打撃する打撃部と、
前記打撃部を第1方向の一方側に付勢して、前記止具を打撃させる付勢部と、
前記付勢部を支持する本体部と、
複数の前記止具を支持するとともに、前記支持部に支持された前記止具が打撃されると新たな止具を前記支持部に供給する供給部と、を有し、
前記供給部は、前記頭部の形状が異なる複数種類の前記止具を支持可能であるとともに、前記支持部に前記止具を供給可能であり、
前記打撃部は、前記付勢部が前記本体部に支持された状態で、前記付勢部に着脱可能である、作業機。
続きを表示(約 1,200 文字)
【請求項2】
前記打撃部は、第1打撃部と、前記第1方向の一方側の端部の形状が前記第1打撃部と異なる第2打撃部と、を含み、
前記第1打撃部及び前記第2打撃部は、択一的に前記付勢部に装着可能である、請求項1に記載の作業機。
【請求項3】
前記第1打撃部は、前記第1方向の一方側の端部の形状が平坦であり、
前記第2打撃部は、前記第1方向の一方側の端部に、前記第1方向の一方側に突出する突出部が設けられる、請求項2に記載の作業機。
【請求項4】
前記支持部は、前記第1方向及び前記第1方向と直交する第2方向に延びる後壁と、前記第1方向及び前記第2方向と直交する第3方向に前記後壁から立設するとともに前記第2方向に並ぶ2つの側壁と、前記第3方向に前記後壁と対向する前壁と、を有し、
前記後壁には、前記供給部から前記止具が供給される供給路が設けられ、
前記供給路は、前記複数種類の止具の全ての種類の止具が通る共通路を含み、
前記突出部は、前記第2方向における位置が前記共通路と重なるように配置される、請求項3に記載の作業機。
【請求項5】
前記共通路は、前記第2方向における位置が前記2つの側壁のうちの一方の側壁に近接して配置される、請求項4に記載の作業機。
【請求項6】
前記止具は、U字型止具とピン型止具とを含む、請求項5に記載の作業機。
【請求項7】
前記本体部は、開口部を有したハウジングを含み、
前記打撃部は、前記開口部を介して前記付勢部に着脱される、請求項5に記載の作業機。
【請求項8】
前記支持部は、着脱可能であるとともに、複数種類の前記支持部が択一的に前記本体部に装着可能である、請求項5に記載の作業機。
【請求項9】
前記供給部は、前記複数種類の止具を支持可能なマガジンを含み、
前記マガジンは、前記支持部に前記複数種類の止具を供給可能である、請求項5に記載の作業機。
【請求項10】
止具を支持する支持部と、
前記支持部に支持された前記止具の頭部を打撃する打撃部と、
前記打撃部を第1方向の一方側に付勢して、前記止具を打撃させる付勢部と、
前記付勢部を支持する本体部と、
複数の前記止具を支持するとともに、前記支持部に支持された前記止具が打撃されると新たな止具を前記支持部に供給する供給部と、を有し、
前記打撃部は、第1打撃部と、前記第1方向の一方側の端部の形状が前記第1打撃部と異なる第2打撃部と、を含み、
前記第1打撃部及び前記第2打撃部は、前記付勢部が前記本体部に支持され状態で、前記付勢部に着脱可能であるとともに、択一的に前記付勢部に装着可能である、作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、釘打機などの作業機に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
作業機の一例として、止具を支持する射出部と、止具を打撃する打撃部と、止具を射出部に供給するマガジンと、を備えた釘打機が知られている。さらに、このような釘打機の一例として、上記マガジンの前方側の端部が射出部に固定された構造の釘打機が特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-34618号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された釘打機は、特定の種類の止具しか打込みできない構成となっている。具体的には、マガジンの前方側の端部が射出部に固定された構造となっており、射出部、ドライバブレード(打撃部)及びマガジンは、特定の種類の止具しか扱えない形状である。
【0005】
したがって、作業者が複数種類の止具を使用する場合には、複数種類の釘打機を用意する必要があり、1台の釘打機で複数種類の止具を打込みできるようにして利便性を向上することが望まれていた。
【0006】
特に複数種類の止具に対して共通のドライバブレードで打込みしようとした場合、相手材に打込まれた止具の周りにドライバブレードの打痕が形成されることがあり、1台の釘打機で複数種類の止具を打込みできる構成にすることは困難であった。
【0007】
本発明の目的は、利便性を向上した作業機を提供することにある。
【課題を解決するための手段】
【0008】
一実施の形態の作業機は、止具を支持する支持部と、前記支持部に支持された前記止具の頭部を打撃する打撃部と、前記打撃部を第1方向の一方側に付勢して、前記止具を打撃させる付勢部と、前記付勢部を支持する本体部と、複数の前記止具を支持するとともに、前記支持部に支持された前記止具が打撃されると新たな止具を前記支持部に供給する供給部と、を有し、前記供給部は、前記頭部の形状が異なる複数種類の前記止具を支持可能であるとともに、前記支持部に前記止具を供給可能であり、前記打撃部は、前記付勢部が前記本体部に支持された状態で、前記付勢部に着脱可能である。
【0009】
他の実施の形態の作業機は、止具を支持する支持部と、前記支持部に支持された前記止具の頭部を打撃する打撃部と、前記打撃部を第1方向の一方側に付勢して、前記止具を打撃させる付勢部と、前記付勢部を支持する本体部と、複数の前記止具を支持するとともに、前記支持部に支持された前記止具が打撃されると新たな止具を前記支持部に供給する供給部と、を有し、前記打撃部は、第1打撃部と、前記第1方向の一方側の端部の形状が前記第1打撃部と異なる第2打撃部と、を含み、前記第1打撃部及び前記第2打撃部は、前記付勢部が前記本体部に支持され状態で、前記付勢部に着脱可能であるとともに、択一的に前記付勢部に装着可能である。
【発明の効果】
【0010】
本発明によれば、作業機の利便性を向上させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
8日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
16日前
日本車輌製造株式会社
締め付け工具
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットリスト
16日前
日本信号株式会社
作業機制御システム
1日前
川崎重工業株式会社
ロボットシステム
16日前
株式会社京阪エンジニアリング
脱着装置
2日前
株式会社マキタ
集塵アタッチメント
1日前
株式会社スター精機
ワーク搬送装置
5日前
モトコマ株式会社
寄せポンチホルダー
17日前
川崎重工業株式会社
ロボットシステム
8日前
トヨタ自動車株式会社
制御装置及び制御方法
16日前
個人
ターンバックル用工具
23日前
株式会社DailyColor
ロボットハンド
17日前
有限会社松尾エンジニアリング
連結部材
17日前
株式会社SHIN‐JIGEN
上肢アシスト装置
22日前
株式会社マキタ
電動工具
8日前
川崎重工業株式会社
多関節ロボット
1日前
馳逸自動化科技(蘇州)有限公司
物品ピッキングロボット
29日前
川崎重工業株式会社
多関節ロボット
1日前
ファナック株式会社
人間の技術に基づく経路生成
23日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
5日前
株式会社不二越
オフラインダイレクトティーチング装置
23日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
17日前
白山工業株式会社
非平行4節リンク型指機構及びグリッパ
9日前
工機ホールディングス株式会社
作業機
9日前
工機ホールディングス株式会社
作業機
1日前
工機ホールディングス株式会社
作業機
1日前
ソフトバンクグループ株式会社
ロボット
16日前
日本信号株式会社
ケーブル中継モジュール及び多関節ロボット
1日前
ファナック株式会社
ロボット組立て技能学習方法
3日前
株式会社イチネンアクセス
ソケットおよび回転工具
16日前
セイコーエプソン株式会社
印刷方法およびロボットシステム
16日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ