TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014356
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023116850
出願日
2023-07-18
発明の名称
オフラインダイレクトティーチング装置
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250123BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
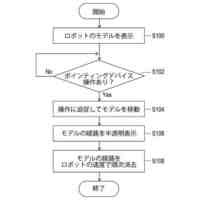
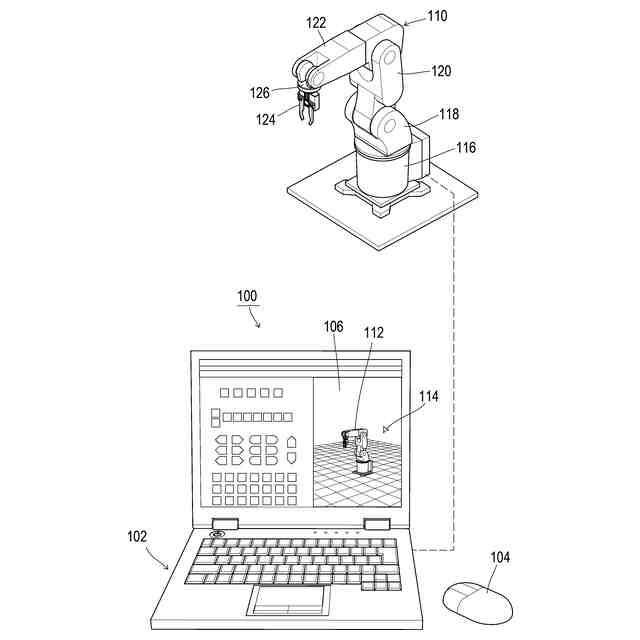
【課題】画面上に表示させた多関節ロボットのモデルをポインティングデバイスで動かしてティーチングを行うとき、実際の多関節ロボットの移動途中の姿勢だけでなく到達した位置も把握することができるオフラインダイレクトティーチング装置を提供する。
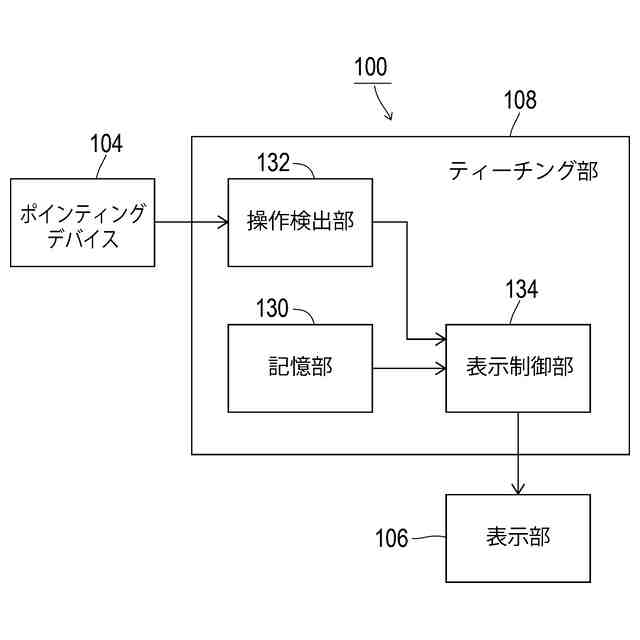
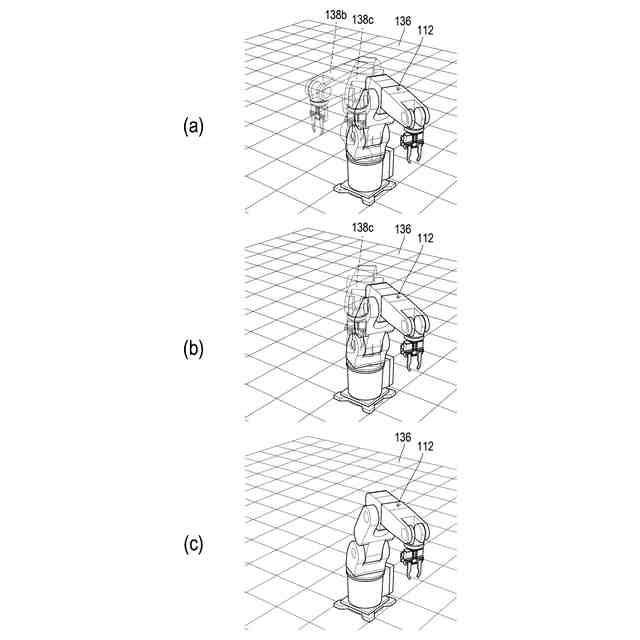
【解決手段】本発明にかかるオフラインダイレクトティーチング装置100は、画面上に表示させた多関節ロボットのモデル112をポインティングデバイス104で動かして実際の多関節ロボット110も動かしながら多関節ロボットのティーチングを行うオフラインダイレクトティーチング装置において、モデルをポインティングデバイスの操作に追従して移動させ、モデルの移動に追従してモデルの経路138a、138b、138cを半透明表示させ、モデルの半透明表示された経路を、半透明表示された順に実際の多関節ロボットの動作に伴い、実際の多関節ロボットの動作速度で消去していくことを特徴とする。
【選択図】図3
特許請求の範囲
【請求項1】
画面上に表示させた多関節ロボットのモデルをポインティングデバイスで動かして実際の多関節ロボットも動かしながら該多関節ロボットのティーチングを行うオフラインダイレクトティーチング装置において、
前記モデルを前記ポインティングデバイスの操作に追従して移動させ、
前記モデルの移動に追従して該モデルの経路を半透明表示させ、
前記モデルの半透明表示された経路を、半透明表示された順に前記実際の多関節ロボットの動作に伴い、前記実際の多関節ロボットの動作速度で消去していくことを特徴とするオフラインダイレクトティーチング装置。
続きを表示(約 84 文字)
【請求項2】
前記モデルの経路は、単位時間ごとの前記モデルを半透明表示させて描くことを特徴とする請求項1に記載のオフラインダイレクトティーチング装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画面上に表示させた多関節ロボットのモデルをポインティングデバイスで動かして実際の多関節ロボットのティーチングを行うオフラインダイレクトティーチング装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
多関節ロボットに動きを教示(ティーチング)する場合、ティーチングペンダントを用いてティーチング作業を行うのが主流である。別の手法としては、作業者が直接ロボットを手で動かすダイレクトティーチングや、コンピュータのソフトウェアで動作用のプログラムを作成するオフラインティーチング等も知られている。
【0003】
特許文献1には、ロボットの制御装置が記載されている(ティーチングペンダント)。このロボットの制御装置は、ヒューマンインターフェースの画面上に表示された任意の動作座標系の2つの軸からなる平面上で、ポインティングデバイスをドラッグすることで画面上のロボットの手首の先端の点に相当するポインティング位置を移動させる。そして、画面上のポインティング位置の単位時間変化に比例する量だけ実際のロボットの手首の先端の点に相当する制御点を平行または回転移動させる。
【0004】
このようにロボットの制御装置では、ポインティング位置のドラッグ操作によってロボットを移動させている。このため、特許文献1のロボットの制御装置では、ティーチングペンダント上のボタン操作に比べてより直感的な手動操作感覚が得られる、としている。
【0005】
特許文献2には、ロボット操作装置が記載されている(ティーチングペンダント)。ロボット操作装置は、ユーザからの入力操作を受ける入力操作部と、動作指令生成部とを備える。動作指令生成部は、入力操作部に入力された入力操作に基づいて複数の駆動軸を有する多関節型のロボットを動作させるための動作指令を生成する。さらに動作指令生成部は、入力操作部に入力された入力操作の操作量を判断する操作量判断処理と、入力操作の操作量に基づいてロボットの移動量を算出する移動量算出処理とを行うことができる。
【0006】
このためロボット操作装置では、ユーザの入力操作部に対する入力操作の操作量と、ロボットの移動量とは相関を有することになる。これにより特許文献2のロボット操作装置では、ユーザは、入力操作の操作量を調整することにより、ロボットの移動量を調整することができ、直感的な操作が可能になり、操作性の向上が図られ、その結果、安全性が向上する、としている。
【0007】
特許文献3には、プロセッサ及び表示装置を備える情報処理装置(HMD:Head Mounted Display)が記載されている(オフラインティーチング)。プロセッサは、環境モデル格納部と、ロボットモデル格納部と、シミュレーション部と、MR画像生成部とを備える。環境モデル格納部は、ロボットが設置される実環境をモデル化した環境モデルを格納する。ロボットモデル格納部は、ロボットをモデル化したロボットモデルを格納する。
【0008】
シミュレーション部は、ロボットの動作軌跡を表示するロボット動作軌跡表示モードが選択された場合、環境モデル格納部から環境モデルを取得し、ロボットモデル格納部からロボットモデルを取得し、動作シーケンスに基づいてロボットモデルを動作させ、ロボットの動作軌跡をメモリに格納する。
【0009】
またMR画像生成部は、実環境におけるロボットの設置位置にロボットモデル画像を重畳し、ロボット動作軌跡画像が重畳されるようにMR画像を生成し、表示装置に表示する。さらにMR画像生成部は、各タイミングのロボット動作軌跡画像について、輪郭のみを表示したり、一部又は全体を半透明にして表示したりする。これにより特許文献3のHMDでは、ロボットを設置する前に行われるロボットが周辺の物体に干渉するか否かの確認をより確実に行うことができる、としている。
【先行技術文献】
【特許文献】
【0010】
特開平09-103978号公報
特開2016-068237号公報
特開2022-186476号公報
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
歯車研削盤
18日前
株式会社不二越
軸受付き歯車
10日前
株式会社不二越
液圧駆動システム
1か月前
株式会社不二越
管用テーパタップ
3日前
株式会社不二越
軸受用冠型保持器
10日前
株式会社不二越
減速機用回転部品
28日前
株式会社不二越
電食防止転がり軸受
10日前
株式会社不二越
インタラップタップ
10日前
株式会社不二越
ロボットビジョンシステム
3日前
株式会社不二越
歯切工具およびその製造方法
1か月前
株式会社不二越
回転軸付きスカイビングカッタ
18日前
株式会社不二越
ソレノイドバルブ用互換スペーサ
1か月前
株式会社不二越
斜板式可変容量型ピストンポンプ
25日前
株式会社不二越
オフラインダイレクトティーチング装置
1か月前
株式会社不二越
スカイビングカッタおよびそれを用いた歯車加工治具
1か月前
株式会社不二越
回転センサ付き軸受装置
1か月前
株式会社不二越
転がり軸受部品用合金鋼,転がり軸受用軌道輪,転がり軸受および転がり軸受用軌道輪の製造方法
1か月前
個人
腰袋
17日前
株式会社マキタ
電動工具
25日前
株式会社マキタ
電動工具
10日前
川崎重工業株式会社
ロボットリスト
25日前
川崎重工業株式会社
ロボットアーム
25日前
川崎重工業株式会社
ロボットアーム
25日前
日本車輌製造株式会社
締め付け工具
25日前
株式会社ケー・エフ・シー
締結構造
今日
川崎重工業株式会社
ロボットシステム
25日前
日本信号株式会社
作業機制御システム
10日前
CKD株式会社
吸着型搬送装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
11日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
トヨタ自動車株式会社
把持装置、把持方法
4日前
株式会社アマダ
磁気吸着装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ