TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016859
公報種別
公開特許公報(A)
公開日
2025-02-05
出願番号
2023119609
出願日
2023-07-24
発明の名称
制御システム、制御方法、及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20250129BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】構成が簡略化しつつ、バックドライバビリティを高めることができること。
【解決手段】制御システムは、アクチュエータに対するトルク指令値を生成するトルク指令生成手段と、アクチュエータのq軸電流の微分値に基づいて、慣性補償指令値を算出する慣性補償算出手段と、慣性補償算出手段により算出された慣性補償指令値に、トルク指令生成手段により生成されたトルク指令値を加算して駆動指令値を算出し、算出した駆動指令値をアクチュエータに出力する駆動指令算出手段と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
アクチュエータに対するトルク指令値を生成するトルク指令生成手段と、
前記アクチュエータのq軸電流の微分値に基づいて、慣性補償指令値を算出する慣性補償算出手段と、
前記慣性補償算出手段により算出された慣性補償指令値に、前記トルク指令生成手段により生成されたトルク指令値を加算して駆動指令値を算出し、該算出した駆動指令値を前記アクチュエータに出力する駆動指令算出手段と、
を備える制御システム。
続きを表示(約 620 文字)
【請求項2】
請求項1記載の制御システムであって、
前記慣性補償算出手段は、q軸電流I
q
と、下記式と、に基づいて、前記慣性補償指令値T
a
*
を算出する、制御システム。
TIFF
2025016859000009.tif
16
96
但し、上記式において、I
an
は慣性補償係数であり、τ
a
はq軸電流I
q
を疑似微分するときの時定数である。
【請求項3】
アクチュエータに対するトルク指令値を生成するステップと、
前記アクチュエータのq軸電流の微分値に基づいて、慣性補償指令値を算出するステップと、
前記算出された慣性補償指令値に、前記生成されたトルク指令値を加算して駆動指令値を算出し、該算出した駆動指令値を前記アクチュエータに出力するステップと、
を含む制御方法。
【請求項4】
アクチュエータに対するトルク指令値を生成する処理と、
前記アクチュエータのq軸電流の微分値に基づいて、慣性補償指令値を算出する処理と、
前記算出された慣性補償指令値に、前記生成されたトルク指令値を加算して駆動指令値を算出し、該算出した駆動指令値を前記アクチュエータに出力する処理と、
をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットなどのアクチュエータを制御する制御システム、制御方法、及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
バックドライバビリティを高くするために、加速度センサ及びオブザーバを使用して、フィードバック制御より慣性補償を行う制御システムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6097174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、制御システムにおいては、例えば、機械学習などを行って慣性補償を行うものもある。上記制御システムにおいては、慣性補償を行うために加速度センサなどの追加のセンサが必要となり、構成が複雑化する虞がある。
【0005】
本開示は、このような問題点を解決するためになされたものであり、構成が簡略化しつつ、バックドライバビリティを高めることができる制御システム、制御方法、及びプログラムを提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本開示の一態様は、
アクチュエータに対するトルク指令値を生成するトルク指令生成手段と、
前記アクチュエータのq軸電流の微分値に基づいて、慣性補償指令値を算出する慣性補償算出手段と、
前記慣性補償算出手段により算出された慣性補償指令値に、前記トルク指令生成手段により生成されたトルク指令値を加算して駆動指令値を算出し、該算出した駆動指令値を前記アクチュエータに出力する駆動指令算出手段と、
を備える制御システムである。
この一態様において、
前記慣性補償算出手段は、q軸電流I
q
と、下記式と、に基づいて、前記慣性補償指令値T
a
*
を算出してもよい。
TIFF
2025016859000002.tif
16
96
但し、上記式において、I
an
は慣性補償係数であり、τ
a
はq軸電流I
q
を疑似微分するときの時定数である。
上記目的を達成するための本開示の一態様は、
アクチュエータに対するトルク指令値を生成するステップと、
前記アクチュエータのq軸電流の微分値に基づいて、慣性補償指令値を算出するステップと、
前記算出された慣性補償指令値に、前記生成されたトルク指令値を加算して駆動指令値を算出し、該算出した駆動指令値を前記アクチュエータに出力するステップと、
を含む制御方法
であってもよい。
上記目的を達成するための本開示の一態様は、
アクチュエータに対するトルク指令値を生成する処理と、
前記アクチュエータのq軸電流の微分値に基づいて、慣性補償指令値を算出する処理と、
前記算出された慣性補償指令値に、前記生成されたトルク指令値を加算して駆動指令値を算出し、該算出した駆動指令値を前記アクチュエータに出力する処理と、
をコンピュータに実行させるプログラム
であってもよい。
【発明の効果】
【0007】
本開示によれば、構成が簡略化しつつ、バックドライバビリティを高めることができる制御システム、制御方法、及びプログラムを提供することができる。
【図面の簡単な説明】
【0008】
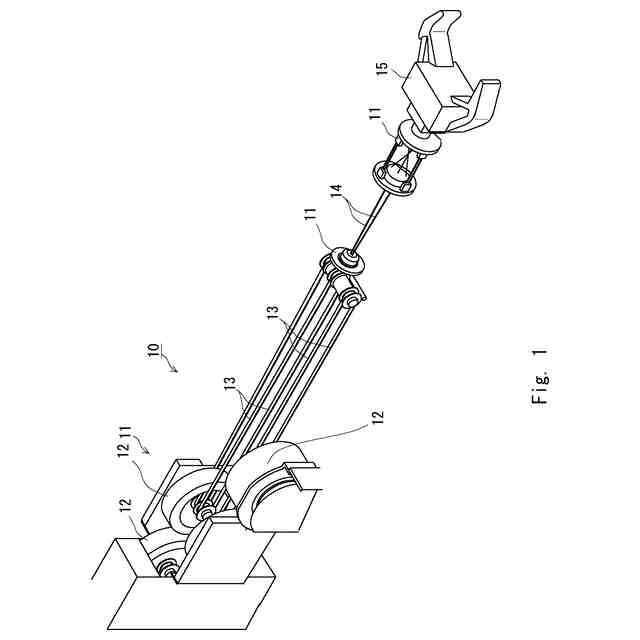
本実施形態に係るロボットアームの概略的な構成を示す図である。
本実施形態に係る制御システムの概略的なシステム構成を示すブロック図である。
本実施形態に係る制御システムの制御ブロック図である。
本実施形態に係る制御方法のフローを示すフローチャートである。
本実施形態に係る制御システムによる実験結果を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して本実施形態について説明する。近年、ロボットの人共生を目指すために柔軟性の高い動作を行うロボットが求められている。ロボットの動作の柔軟性を高めるためには、ロボットの関節のアクチュエータのバックドライバビリティを高くすることが重要となる。
【0010】
アクチュエータのバックドライバビリティを高くすることと、アクチュエータの小型、軽量、及び高トルク化はトレードオフの関係にある。このため、加速度に比例する補償制御でアクチュエータのバックドライバビリティを高くすることが有用である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ