TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025020968
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124622
出願日
2023-07-31
発明の名称
液圧駆動装置
出願人
川崎重工業株式会社
代理人
個人
主分類
F15B
11/16 20060101AFI20250205BHJP(流体圧アクチュエータ;水力学または空気力学一般)
要約
【課題】部品点数の増加を抑制できる液圧駆動装置を提供する。
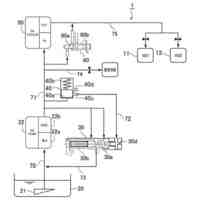
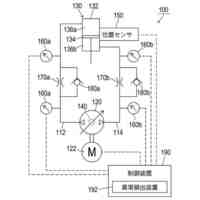
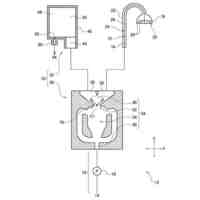
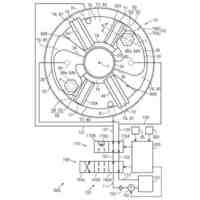
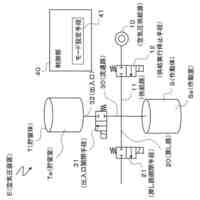
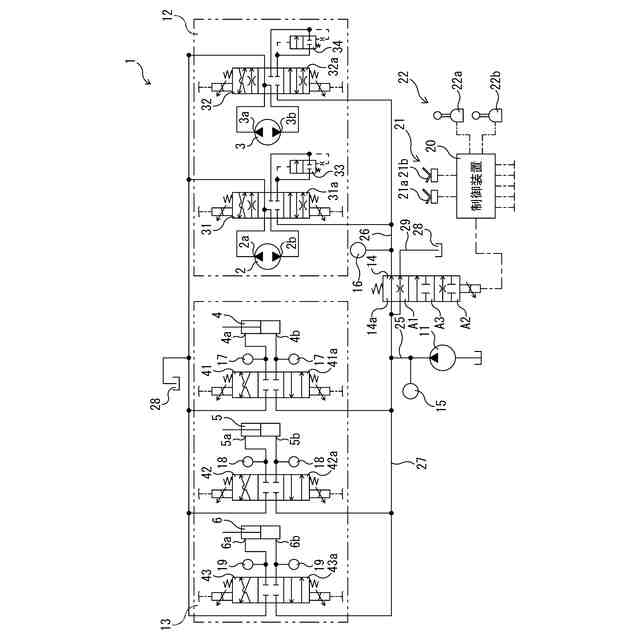
【解決手段】液圧駆動装置1は、ポンプ通路25に接続され、ポンプ通路に作動液を吐出する液圧ポンプ11と、ポンプ通路に接続される第1通路26に接続される第1液圧回路12と、ポンプ通路に接続される第2通路27に接続される第2液圧回路13と、ポンプ通路と第1通路との間に介在し、ポンプ通路と第1通路との間の開度である第1開度を制御信号に応じて変える流量制御弁14と、を備え、流量制御弁は、タンク28に更に接続され、制御信号に応じてポンプ通路とタンクとの間を開閉する。
【選択図】図1
特許請求の範囲
【請求項1】
ポンプ通路に接続され、前記ポンプ通路に作動液を吐出する液圧ポンプと、
前記ポンプ通路に接続される第1通路に接続される第1液圧回路と、
前記ポンプ通路に接続される第2通路に接続される第2液圧回路と、
前記ポンプ通路と前記第1通路との間に介在し、制御信号に応じて、前記ポンプ通路と前記第1通路との間の開度である第1開度を変える流量制御弁と、を備え、
前記流量制御弁は、タンクに更に接続され、制御信号に応じて、前記ポンプ通路と前記タンクとの間を開閉する液圧駆動装置。
続きを表示(約 1,000 文字)
【請求項2】
前記流量制御弁は、制御信号に応じて、前記ポンプ通路と前記タンクとの間の開度である第2開度を変える、請求項1に記載の液圧駆動装置。
【請求項3】
前記流量制御弁は、制御信号に応じてストロークすることによって、第1制御位置と第2制御位置とに切換えられる制御スプールを有し、
第1制御位置では、前記ポンプ通路と前記第1通路との間が開かれ、且つ前記制御スプールのストローク量に応じて第2開度が絞られ、
第2制御位置では、前記ポンプ通路と前記タンクとの間が閉じられ、且つ前記制御スプールのストローク量に応じて第1開度が絞られる、請求項2に記載の液圧駆動装置。
【請求項4】
前記制御スプールは、制御信号に応じてストロークすることによって第3制御位置に更に切換えられ、
第3制御位置では、第1開度が最大開度となり、且つ前記ポンプ通路と前記タンクとの間が閉じられる、請求項3に記載の液圧駆動装置。
【請求項5】
前記流量制御弁は、前記ポンプ通路と前記タンクとの間を閉じた状態において第1開度を最小開度とする、請求項1に記載の液圧駆動装置。
【請求項6】
制御信号を出力することによって前記流量制御弁の動きを制御する制御装置を更に備え、
前記第1液圧回路は、第1信号に応じて作動液の流れを遮断し、
前記制御装置は、制御信号を出力することによって前記流量制御弁の第1開度を最小開度とし、且つ第1信号を出力することによって前記第1液圧回路において作動液の流れを遮断させる、請求項5に記載の液圧駆動装置。
【請求項7】
前記第1液圧回路は、走行モータと前記液圧ポンプとの間の開度を調整することによって前記走行モータへの作動液の流れを制御する走行系液圧回路であり、
前記第2液圧回路は、荷役アクチュエータと前記液圧ポンプとの間の開度を調整することによって前記荷役アクチュエータへの作動液の流れを制御する荷役系液圧回路である、請求項1に記載の液圧駆動装置。
【請求項8】
前記第1液圧回路は、荷役アクチュエータと前記液圧ポンプとの間の開度を調整することによって前記荷役アクチュエータへの作動液の流れを制御する荷役系液圧回路であり、
前記第2液圧回路は、走行モータと前記液圧ポンプとの間の開度を調整することによって前記走行モータへの作動液の流れを制御する走行系液圧回路である、請求項1に記載の液圧駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、2つの液圧回路に作動液を供給する液圧駆動装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
建設機械の走行モータ及び荷役アクチュエータの液圧源を1つのポンプとする1ポンプシステムが実用に供されている。1ポンプシステムの液圧駆動装置として、例えば特許文献1のような油圧回路が知られている。特許文献1の油圧回路では、ポンプが第1ポンプライン及び第2ポンプラインを介して走行モータ及び荷役アクチュエータに夫々繋がっている。第2ポンプライン上には、優先弁が設けられている。優先弁には、走行モータの供給圧が作用している。それ故、優先弁は、走行モータの供給圧が大きくなると、第2ポンプラインの開度が絞られる。これにより、圧油が走行モータに優先的に流される。
【先行技術文献】
【特許文献】
【0003】
特開2020-026828号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の油圧回路には、ポンプをアンロード状態にするべく、アンロード弁が更に備わっている。アンロード弁を含む油圧回路の各種弁は、例えばマルチコントロール弁のバルブブロックに形成されている挿通孔にスプールを挿通することによって構成されている。それ故、弁の数が増えることによって、油圧回路が備わる液圧駆動装置の部品点数が増加する。
【0005】
そこで本発明は、部品点数の増加を抑制できる液圧駆動装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
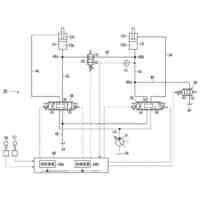
本発明の液圧駆動装置は、ポンプ通路に接続され、前記ポンプ通路に作動液を吐出する液圧ポンプと、前記ポンプ通路に接続される第1通路に接続される第1液圧回路と、前記ポンプ通路に接続される第2通路に接続される第2液圧回路と、前記ポンプ通路と前記第1通路との間に介在し、制御信号に応じて、前記ポンプ通路と前記第1通路との間の開度である第1開度を変える流量制御弁と、を備え、前記流量制御弁は、タンクに更に接続され、制御信号に応じて、前記ポンプ通路と前記タンクとの間を開閉する。
【0007】
本発明に従えば、流量制御弁は、制御信号に応じてポンプ通路と第1通路との間の開度である第1開度を変える。それ故、流量制御弁は、制御信号に応じて第1開度を絞ることによって、第2液圧回路に優先的に作動液を流すことができる。また、流量制御弁は、タンクに更に接続され、制御信号に応じてポンプ通路とタンクとの間を開閉する。それ故、流量制御弁は、液圧ポンプから吐出される作動液をタンクに排出することができる、即ち液圧ポンプをアンロード状態にすることができる。従って、流量制御弁は、第2液圧回路に作動液を優先的に流す優先弁、及び液圧ポンプをアンロード状態にするアンロード弁の両方の機能を達成することができる。それ故、液圧駆動装置における部品点数の増加を抑制することができる。
【発明の効果】
【0008】
本発明によれば、液圧駆動装置において部品点数の増加が抑制される。
【図面の簡単な説明】
【0009】
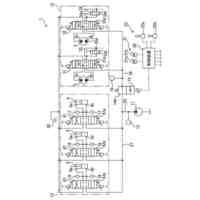
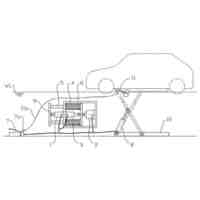
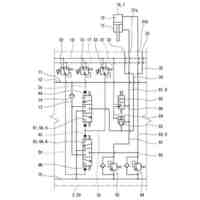
本発明の第1実施形態の液圧駆動装置の構成を示す回路図である。
図1の液圧駆動装置に備わる流量制御弁の制御スプールのストローク量に対する第1開度及び第2開度の変化を示すグラフである。
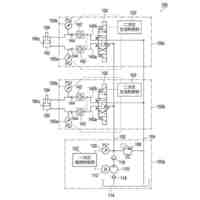
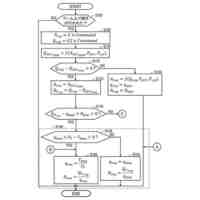
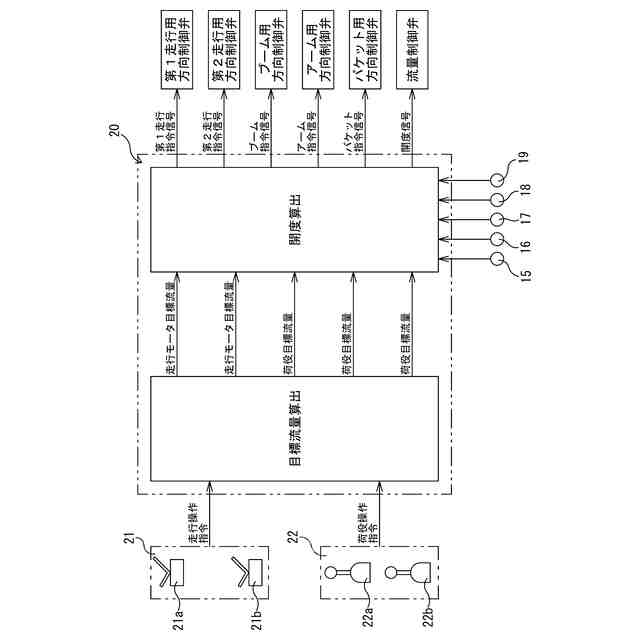
図1の液圧駆動装置に備わる制御装置の制御ブロックを示すブロック図である。
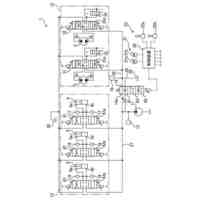
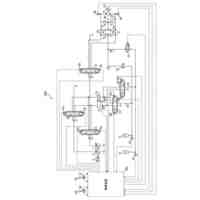
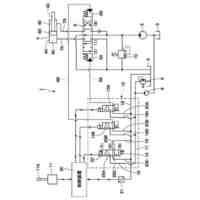
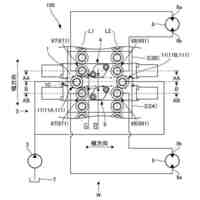
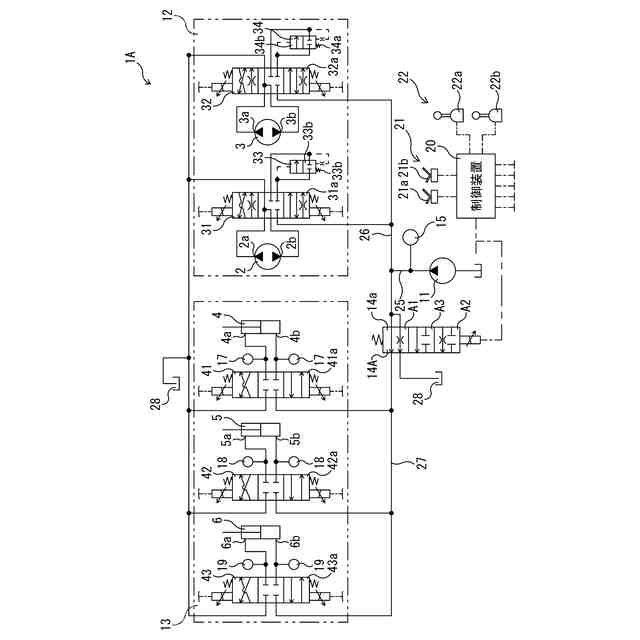
本発明の第2実施形態の液圧駆動装置の構成を示す回路図である。
【発明を実施するための形態】
【0010】
以下、本発明に係る第1及び第2実施形態の液圧駆動装置1,1Aについて前述する図面を参照しながら説明する。なお、以下の説明で用いる方向の概念は、説明する上で便宜上使用するものであって、発明の構成の向き等をその方向に限定するものではない。また、以下に説明する液圧駆動装置1,1Aは、本発明の一実施形態に過ぎない。従って、本発明は実施形態に限定されず、発明の趣旨を逸脱しない範囲で追加、削除、変更が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
豊和工業株式会社
クランプ装置
5か月前
株式会社豊田自動織機
流体圧シリンダ
1か月前
株式会社SUBARU
油圧回路
8か月前
株式会社不二越
電磁切替弁
1か月前
川崎重工業株式会社
液圧駆動装置
7か月前
株式会社コスメック
シリンダ装置
2か月前
川崎重工業株式会社
液圧駆動装置
7か月前
株式会社不二越
油圧システム
4か月前
個人
省エネ改良型油圧リバースブースター
1か月前
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
6日前
コベルコ建機株式会社
建設機械
6か月前
日立建機株式会社
作業機械
6か月前
学校法人東海大学
流れ制御装置
5か月前
株式会社不二越
油圧駆動システム
1か月前
ナブテスコ株式会社
方向切換弁装置
4か月前
日立建機株式会社
油圧駆動装置
6か月前
住友建機株式会社
ショベルの制御方法
3か月前
学校法人 中央大学
人工筋アクチュエータ装置
2か月前
川崎重工業株式会社
マルチコントロールバルブ
7か月前
川崎重工業株式会社
マルチコントロールバルブ
7か月前
川崎重工業株式会社
マルチコントロールバルブ
7か月前
株式会社LIXIL
脈動流生成装置及び建築設備
4か月前
川崎重工業株式会社
弁装置
7か月前
アズビル株式会社
パイロットリレー及びポジショナ
1か月前
コベルコ建機株式会社
建設機械の油圧駆動装置
6か月前
日立建機株式会社
油圧システム
9日前
カヤバ株式会社
アクチュエータ
7か月前
CKD株式会社
アクチュエータの動作検出装置
4か月前
カヤバ株式会社
流体圧制御装置
21日前
カヤバ株式会社
流体圧シリンダ
6か月前
ナブテスコ株式会社
ロータリーアクチュエータ
4か月前
カヤバ株式会社
流体圧制御装置
6か月前
株式会社ジェイテクトフルードパワーシステム
サージタンク
8か月前
カヤバ株式会社
インレットハウジング
4か月前
中本パックス株式会社
気体圧装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ