TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025020970
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124624
出願日
2023-07-31
発明の名称
マルチコントロールバルブ
出願人
川崎重工業株式会社
代理人
個人
主分類
F15B
11/00 20060101AFI20250205BHJP(流体圧アクチュエータ;水力学または空気力学一般)
要約
【課題】通路を容易に形成でき、且つコンパクトに形成できるマルチコントロールバルブを提供する。
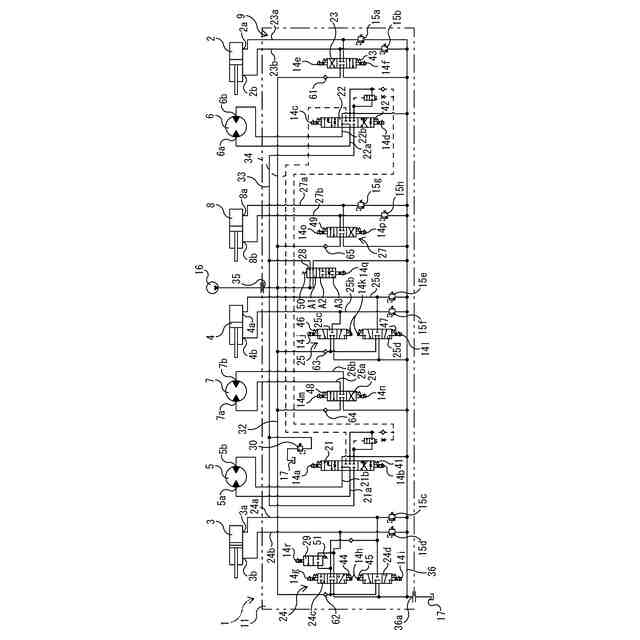
【解決手段】マルチコントロールバルブでは、バケット用スプールと、アーム用スプールと、ブーム用スプールと、第1走行用スプールと、第2走行用スプールと、旋回用スプールと、を含む第1スプール群と、荷役側通路と走行側通路とが形成され且つ第1スプール群の各スプールが挿通されるバルブブロックと、再生用スプールと、前記荷役側通路に優先的に流す荷役優先用スプールとを含む第2スプール群であって、第1スプール群の各スプールと互いに平行するように各スプールがバルブブロックに挿通される第2スプール群と、を備え、第1スプール群の各スプールは、バルブブロックにおいて所定方向に一列に配置され、第2スプール群の各スプールは、バルブブロックにおいて所定方向に一列に、且つ第1スプール群の各スプールと互いに異なる列を成すように配置されている。
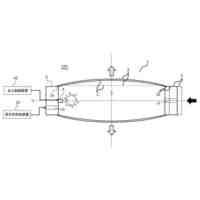
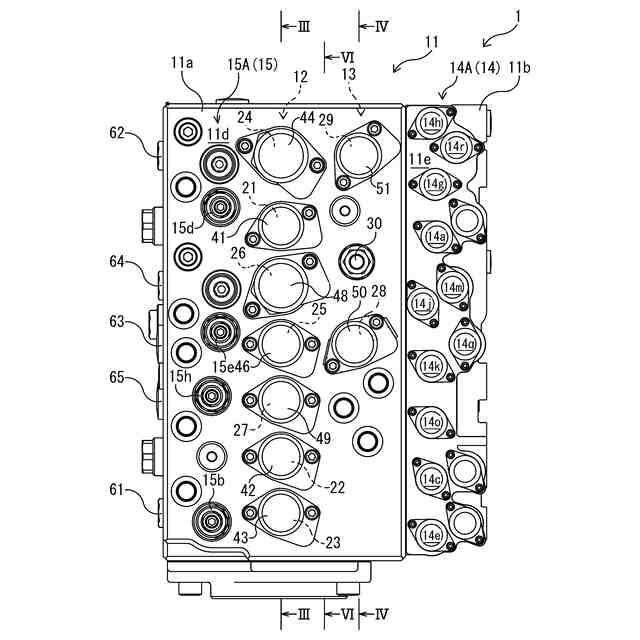
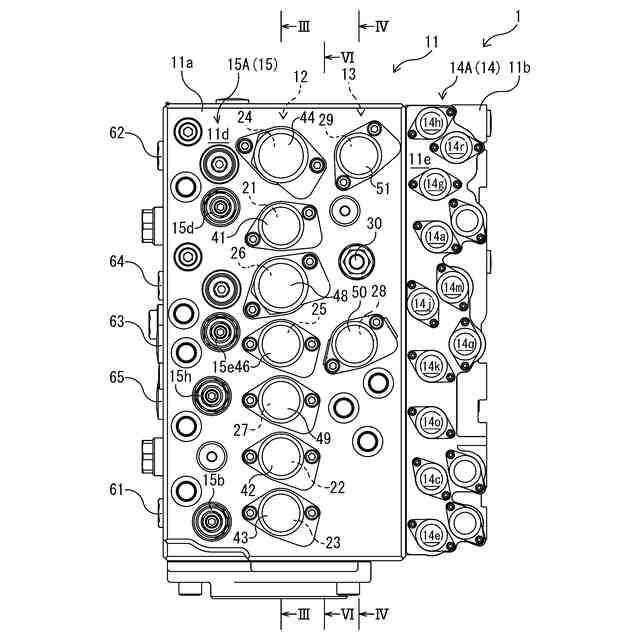
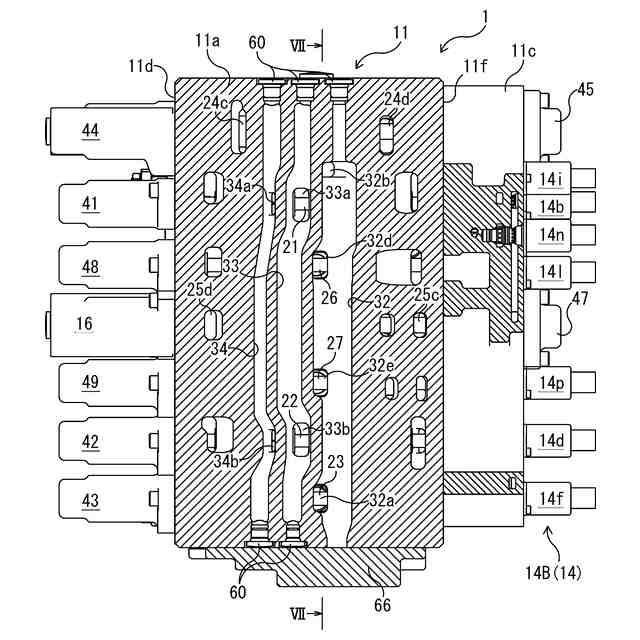
【選択図】 図1
特許請求の範囲
【請求項1】
バケットシリンダに供給する作動液の流れを制御するバケット用スプールと、アームシリンダに供給する作動液の流れを制御するアーム用スプールと、ブームシリンダに供給する作動液の流れを制御するブーム用スプールと、第1走行モータに供給する作動液の流れを制御する第1走行用スプールと、第2走行モータに供給する作動液の流れを制御する第2走行用スプールと、旋回モータに供給する作動液の流れを制御する旋回用スプールと、を含む第1スプール群と、
前記バケット用スプール、前記アーム用スプール、前記ブーム用スプール、及び前記旋回用スプールが接続されている荷役側通路と、前記第1走行用スプール及び前記第2走行用スプールが接続されている走行側通路とが形成され、前記第1スプール群の各スプールが互いに平行に挿通されるバルブブロックと、
前記アームシリンダのロッド側ポートからヘッド側ポートへ供給される作動液の流れを制御する再生用スプールと、前記走行側通路に流れる作動液の流量を制御することによって作動液を前記荷役側通路に優先的に流す荷役優先用スプールとを含む第2スプール群であって、前記第1スプール群の各スプールと互いに平行するように各スプールが前記バルブブロックに挿通される前記第2スプール群と、を備え、
前記第1スプール群の各スプールは、前記バルブブロックにおいて所定方向に一列に配置され、
前記第2スプール群の各スプールは、前記バルブブロックにおいて所定方向に一列に、且つ前記第1スプール群の各スプールと互いに異なる列を成すように配置されている、マルチコントロールバルブ。
続きを表示(約 780 文字)
【請求項2】
前記荷役優先用スプールは、アンロード位置及び優先位置に夫々位置することができ、アンロード位置において前記荷役側通路を流れる作動液を排出し、優先位置において作動液を前記荷役側通路に優先的に流す、請求項1に記載のマルチコントロールバルブ。
【請求項3】
前記第1走行用スプール及び前記第2走行用スプールは、所定方向に互いに離して配置され、
前記荷役優先用スプールは、前記第1スプール群及び前記第2スプール群が並ぶ列方向に見て前記第1走行用スプール及び前記第2走行用スプールの間に配置されている、請求項1に記載のマルチコントロールバルブ。
【請求項4】
前記バルブブロックは、ポンプポートを含み、
前記ポンプポートは、前記荷役側通路に接続されている、請求項1に記載のマルチコントロールバルブ。
【請求項5】
前記走行側通路は、前記荷役優先用スプールを介して前記荷役側通路に接続されている、請求項1に記載のマルチコントロールバルブ。
【請求項6】
前記荷役側通路及び前記走行側通路は、前記バルブブロックの前記第1スプール群及び前記第2スプール群が並ぶ列方向において前記第1スプール群と前記第2スプール群との間に形成されている、請求項1に記載のマルチコントロールバルブ。
【請求項7】
前記バルブブロックには、前記第1走行モータ及び前記第2走行モータに作動液を供給する際に前記第1走行モータと前記第2走行モータとを連通する連通路が形成され、
前記連通路は、前記バルブブロックにおいて前記第1スプール群及び前記第2スプール群が並ぶ列方向において前記第1スプール群と前記第2スプール群との間に形成されている、請求項6に記載のマルチコントロールバルブ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数のスプールが挿通されるマルチコントロールバルブに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
ショベル等の建設機械では、各アクチュエータへの作動液の流れを制御するマルチコントロールバルブが備わっている。マルチコントロールバルブの一例として、例えば特許文献1の油圧制御弁装置が知られている。油圧制御弁装置では、各アクチュエータへの作動液の流れを制御するスプール、即ち駆動系スプールが本体ブロックに一列に並べて配置されている。
【先行技術文献】
【特許文献】
【0003】
特開平11-190044号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
マルチコントロールバルブには、駆動系スプールの他に補助系スプールが備わっている。補助系スプールは、建設機械における省エネルギー化や操作性向上の等の様々な要望に伴ってマルチコントロールバルブに備え付けられているスプールである。補助系スプールとして例えば再生用スプール、優先用スプール、及びアンロードスプールがある。補助系スプールは、特定のスプールに接続されている。それ故、補助系スプールが配される位置によって、マルチコントロールバルブに形成される通路が複雑になる。
【0005】
そこで本発明は、通路を容易に形成することができ、且つコンパクトに形成することができるマルチコントロールバルブを提供することを目的としている。
【課題を解決するための手段】
【0006】
本開示のマルチコントロールバルブは、バケットシリンダに供給する作動液の流れを制御するバケット用スプールと、アームシリンダに供給する作動液の流れを制御するアーム用スプールと、ブームシリンダに供給する作動液の流れを制御するブーム用スプールと、第1走行モータに供給する作動液の流れを制御する第1走行用スプールと、第2走行モータに供給する作動液の流れを制御する第2走行用スプールと、旋回モータに供給する作動液の流れを制御する旋回用スプールと、を含む第1スプール群と、前記バケット用スプール、前記アーム用スプール、前記ブーム用スプール、及び前記旋回用スプールが接続されている荷役側通路と、前記第1走行用スプール及び前記第2走行用スプールが接続されている走行側通路とが形成され、前記第1スプール群の各スプールが互いに平行に挿通されるバルブブロックと、前記アームシリンダのロッド側ポートからヘッド側ポートへ供給される作動液の流れを制御する再生用スプールと、前記走行側通路に流れる作動液の流量を制御することによって作動液を前記荷役側通路に優先的に流す荷役優先用スプールとを含む第2スプール群であって、前記第1スプール群の各スプールと互いに平行するように各スプールが前記バルブブロックに挿通される前記第2スプール群と、を備え、前記第1スプール群の各スプールは、前記バルブブロックにおいて所定方向に一列に配置され、前記第2スプール群の各スプールは、前記バルブブロックにおいて所定方向に一列に、且つ前記第1スプール群の各スプールと互いに異なる列を成すように配置されているものである。
【0007】
本開示に従えば、各シリンダ及び各モータであるアクチュエータを駆動する駆動系のスプールが一列に配置されているので、通路の形成を容易にすることができる。また、駆動系のスプール以外の補助系のスプールを駆動系スプールの列の横に一列に配置するので、マルチコントロールバルブをコンパクトに形成することができる。それ故、機器への搭載性を向上させることができる。
【発明の効果】
【0008】
本開示によれば、通路を容易に形成することができ、且つコンパクトに形成することができる。
【図面の簡単な説明】
【0009】
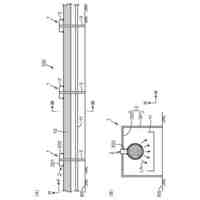
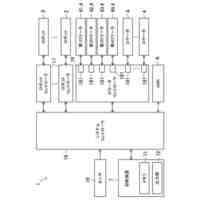
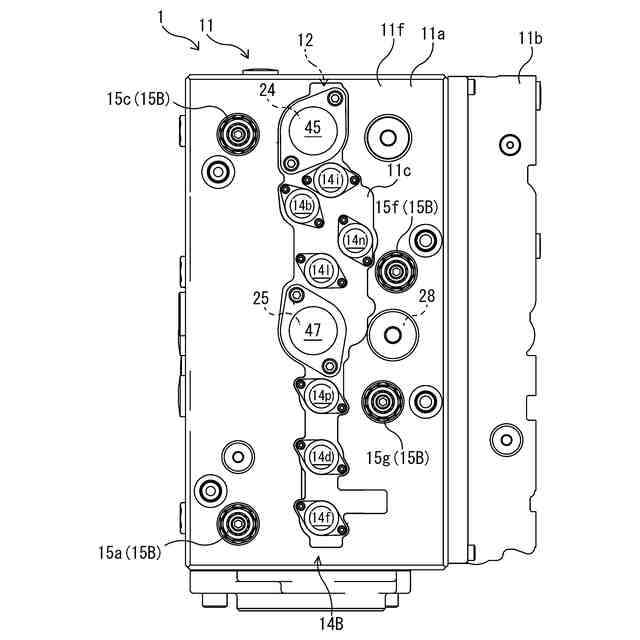
本開示の本実施形態に係るマルチコントロールバルブを示す平面図である。
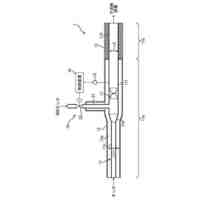
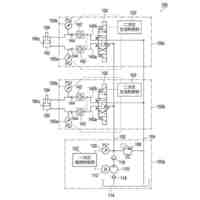
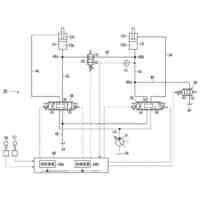
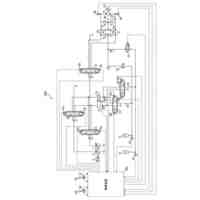
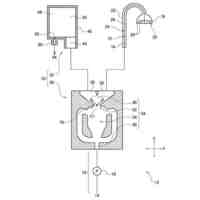
図1のマルチコントロールバルブに構成される液圧回路を示す回路図である。
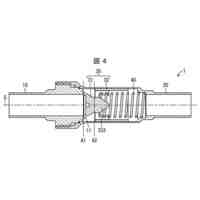
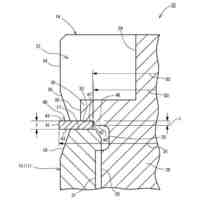
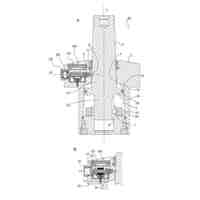
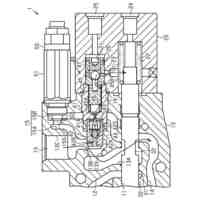
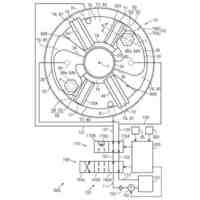
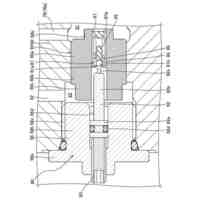
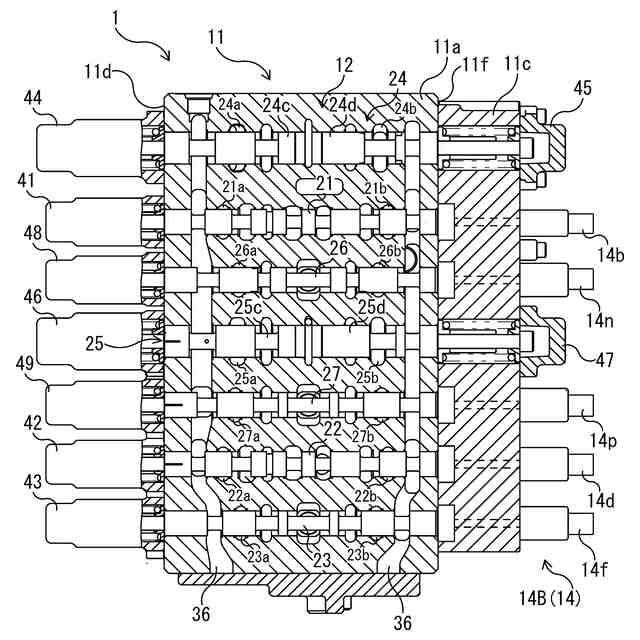
図1のマルチコントロールバルブを切断線III-IIIで切断して見た断面図である。
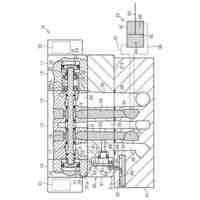
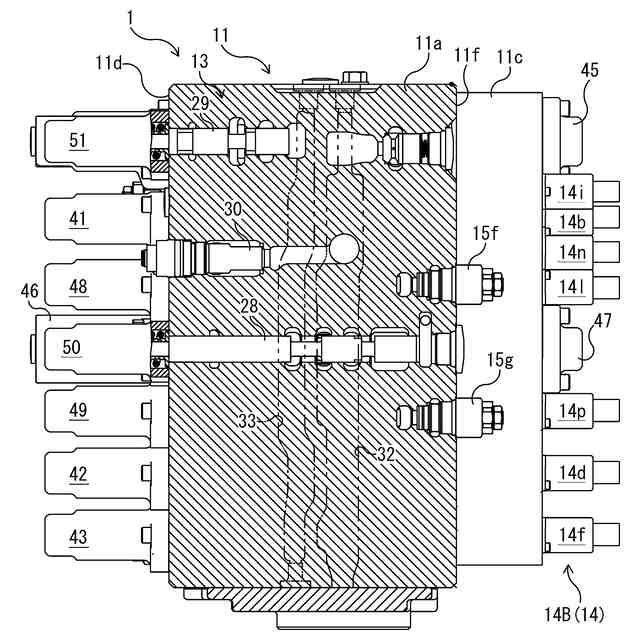
図1のマルチコントロールバルブを切断線IV-IVで切断して見た断面図である。
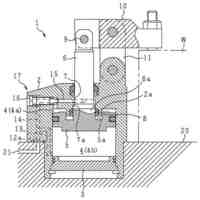
図1のマルチコントロールバルブを示す底面図である。
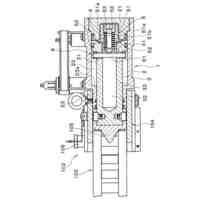
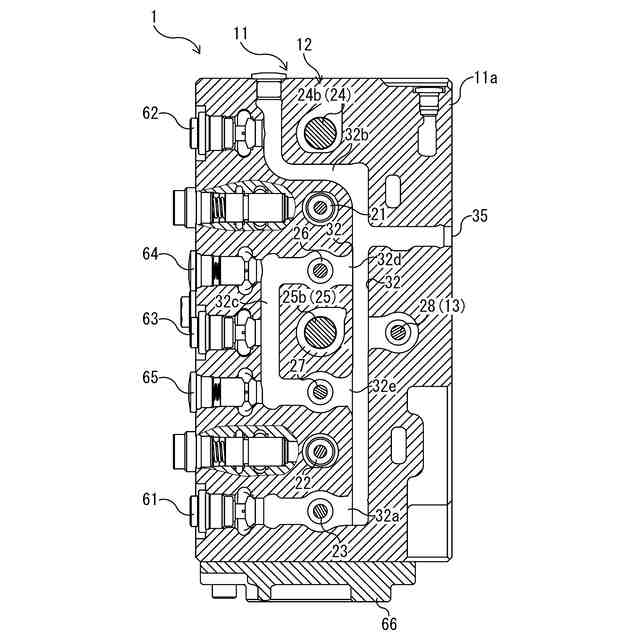
図1のマルチコントロールバルブを切断線VI-VIで切断して見た断面図である。
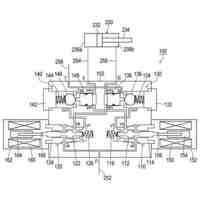
図6のマルチコントロールバルブを切断線VII-VIIで切断して見た断面図である。
【発明を実施するための形態】
【0010】
以下、本開示に係る実施形態のマルチコントロールバルブ1について前述する図面を参照しながら説明する。なお、以下の説明で用いる方向の概念は、説明する上で便宜上使用するものであって、発明の構成の向き等をその方向に限定するものではない。また、以下に説明するマルチコントロールバルブ1は、本開示の一実施形態に過ぎない。従って、本開示は実施形態に限定されず、発明の趣旨を逸脱しない範囲で追加、削除、変更が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
監視システム
今日
川崎重工業株式会社
配管の支持構造
今日
川崎重工業株式会社
ロボットシステム
今日
川崎重工業株式会社
ロボットシステム
今日
川崎重工業株式会社
極低温流体用配管設備
1日前
川崎重工業株式会社
ロボットの診断システム
今日
株式会社キッツ
逆流防止弁
今日
川崎重工業株式会社
ロボットシステム及びその動作方法
1日前
川崎重工業株式会社
配管の接続構造および配管システム
2日前
川崎重工業株式会社
ロボットシステムの制御方法及びロボットシステム
今日
川崎重工業株式会社
極低温用圧縮設備、及びそれを備えるボイルオフガス液化システム
1日前
川崎重工業株式会社
手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法
1日前
豊和工業株式会社
クランプ装置
5か月前
株式会社豊田自動織機
流体圧シリンダ
1か月前
三和テッキ株式会社
油圧アクチュエータ
今日
株式会社不二越
電磁切替弁
1か月前
株式会社コスメック
シリンダ装置
2か月前
株式会社不二越
油圧システム
4か月前
個人
省エネ改良型油圧リバースブースター
1か月前
コベルコ建機株式会社
建設機械
7か月前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業機械
7日前
学校法人東海大学
流れ制御装置
5か月前
日立建機株式会社
作業機械
6か月前
株式会社不二越
油圧駆動システム
1か月前
日立建機株式会社
油圧駆動装置
6か月前
ナブテスコ株式会社
方向切換弁装置
4か月前
住友建機株式会社
ショベルの制御方法
3か月前
学校法人 中央大学
人工筋アクチュエータ装置
2か月前
株式会社LIXIL
脈動流生成装置及び建築設備
4か月前
アズビル株式会社
パイロットリレー及びポジショナ
1か月前
ナブテスコ株式会社
ロータリーアクチュエータ
4か月前
CKD株式会社
アクチュエータの動作検出装置
4か月前
コベルコ建機株式会社
建設機械の油圧駆動装置
6か月前
カヤバ株式会社
流体圧制御装置
22日前
カヤバ株式会社
流体圧制御装置
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ