TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025023989
公報種別
公開特許公報(A)
公開日
2025-02-19
出願番号
2024193153,2023197852
出願日
2024-11-01,2019-08-09
発明の名称
仲介装置、それを用いた仲介方法及びプログラム
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B25J
9/22 20060101AFI20250212BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】遠隔操作ロボットの利用拡大を図ることが可能な仲介装置及びそれを用いた仲介方法を提供する。
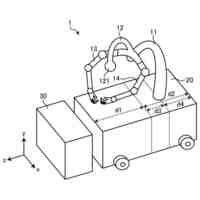
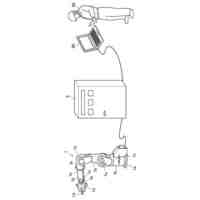
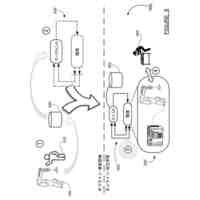
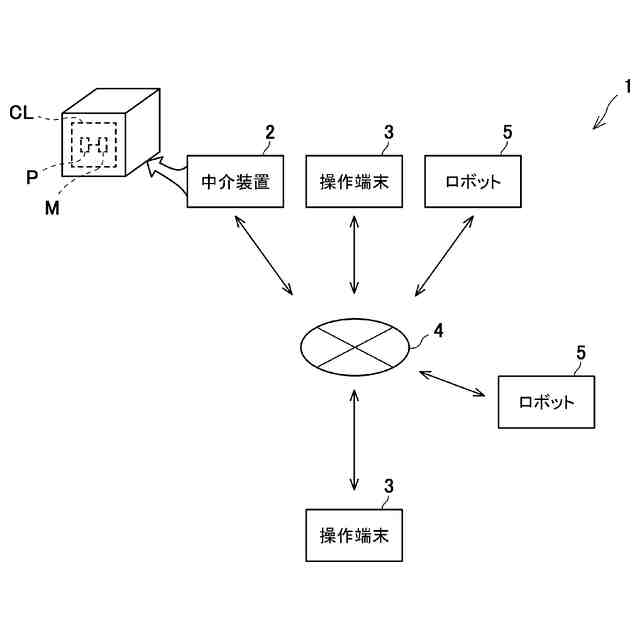
【解決手段】仲介装置(2)は、複数のロボット(5)から、当該複数のロボット(5)を操作して複数の作業を行う遠隔作業者の募集を受信し、当該仲介装置(2)を有する仲介者のネットワーク(4)上のサイトに複数の作業を行う遠隔作業者の募集を掲示し、且つ、複数の遠隔作業者が、複数の操作端末(3)から前記サイトにアクセスして複数の作業を行う遠隔作業者の募集に対し複数の応募をした場合、この複数の応募に基づいて、1以上のロボット(5)及び1以上の操作端末(3)を、1以上の選択ロボット(5)及び1以上の選択操作端末(3)として選択し、且つ、1以上の選択操作端末(3)によって1以上の選択ロボット(5)を操作することが可能なように、1以上の選択操作端末(3)を1以上の選択ロボット(5)に接続するよう構成されている。
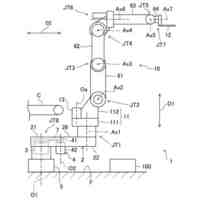
【選択図】図1
特許請求の範囲
【請求項1】
複数の遠隔作業者が操作する複数の操作端末と1以上のロボット保有者が保有する複数のロボットとにデータ通信可能なネットワークを介して接続された、仲介者が有する仲介装置であって、
前記仲介装置は、
前記複数のロボット及び前記複数の操作端末から、1以上の前記ロボット及び1以上の前記操作端末を、1以上の選択ロボット及び1以上の選択操作端末として選択し、且つ、
前記1以上の選択操作端末によって前記1以上の選択ロボットを操作することが可能なように、前記複数の作業の形態に応じて、前記1以上の選択操作端末を前記1以上の選択ロボットに、n(nは2以上の自然数)対1、1対m(mは2以上の自然数)、及びn対mの少なくともいずれかの関係で接続するよう構成されており、
前記仲介装置は、
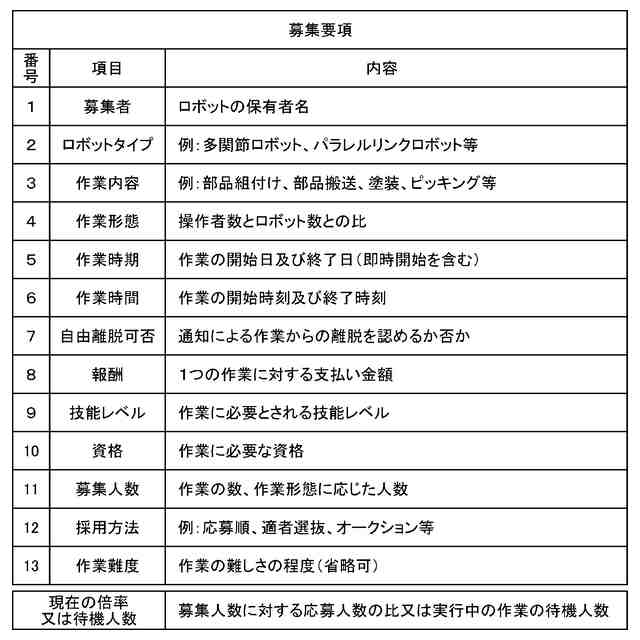
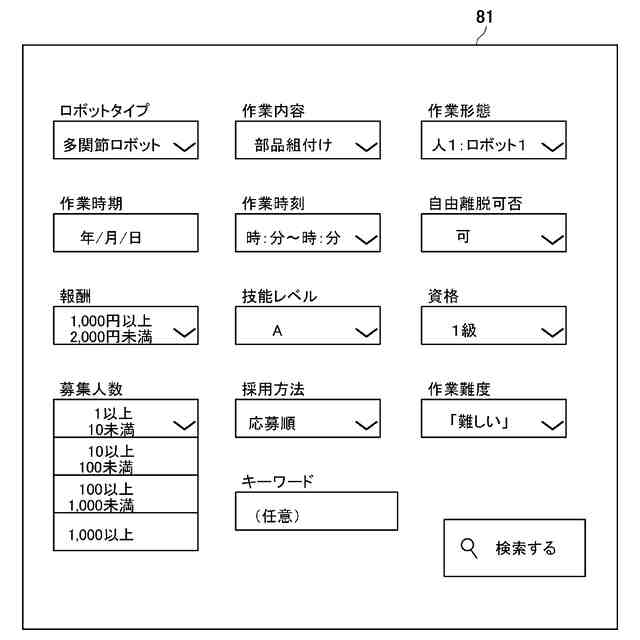
前記複数のロボットから、当該複数のロボットを操作して複数の作業を行う遠隔作業者の募集を受信し、当該仲介装置を有する前記仲介者の前記ネットワーク上のサイトに前記複数の作業を行う遠隔作業者の募集を掲示し、
前記複数の操作端末から、前記サイトを介して、前記募集に対する応募を受信し、
前記応募の応募要項が前記募集の募集要項に適合するか否かを判定し、前記複数のロボット及び前記複数の操作端末から、前記応募の応募要項と前記募集の募集要項とが互いに適合する前記1以上のロボット及び前記1以上の操作端末を、前記1以上の選択ロボット及び前記1以上の選択操作端末として選択するよう構成されている、仲介装置。
続きを表示(約 2,100 文字)
【請求項2】
複数の遠隔作業者が操作する複数の操作端末と1以上のロボット保有者が保有する複数のロボットとにデータ通信可能なネットワークを介して接続された、仲介者が有する仲介装置であって、
前記仲介装置は、
前記複数のロボット及び前記複数の操作端末から、1以上の前記ロボット及び1以上の前記操作端末を、1以上の選択ロボット及び1以上の選択操作端末として選択し、且つ、
前記1以上の選択操作端末によって前記1以上の選択ロボットを操作することが可能なように、前記複数の作業の形態に応じて、前記1以上の選択操作端末を前記1以上の選択ロボットに、n(nは2以上の自然数)対1、1対m(mは2以上の自然数)、及びn対mの少なくともいずれかの関係で接続するよう構成されており、
前記仲介装置は、
前記複数のロボットから、当該複数のロボットを操作して複数の作業を行う遠隔作業者に対する募集要項を受信し、
前記複数の操作端末から、当該複数の操作端末を操作する前記複数の遠隔作業者の就労要項を受信するように更に構成されており、
前記仲介装置は、前記複数の募集要項と前記複数の就労要項とを対比し、前記募集要項と前記就労要項とが互いに適合する前記1以上のロボット及び前記1以上の操作端末を、前記1以上の選択ロボット及び前記1以上の選択操作端末として選択するよう構成されている、仲介装置。
【請求項3】
複数の遠隔作業者が操作する複数の操作端末と1以上のロボット保有者が保有する複数のロボットとにデータ通信可能なネットワークを介して接続された、仲介者が有する仲介装置を用いた仲介方法であって、
前記仲介方法は、
前記仲介装置によって、前記複数のロボット及び前記複数の操作端末から、1以上の前記ロボット及び1以上の前記操作端末を、1以上の選択ロボット及び1以上の選択操作端末として選択する工程と、
前記仲介装置によって、前記1以上の選択操作端末によって前記1以上の選択ロボットを操作することが可能なように、前記複数の作業の形態に応じて、前記1以上の選択操作端末を前記1以上の選択ロボットに、n(nは2以上の自然数)対1、1対m(mは2以上の自然数)、及びn対mの少なくともいずれかの関係で接続する工程と、を含み、
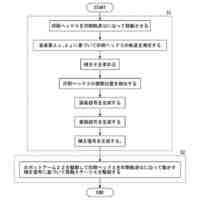
前記仲介装置によって、前記複数のロボットを操作して複数の作業を行う遠隔作業者の募集を受信する工程と、
前記仲介装置によって、当該仲介装置を有する前記仲介者の前記ネットワーク上のサイトに前記複数の作業を行う遠隔作業者の募集を掲示する工程と、
前記複数の操作端末から、前記サイトを介して、前記募集に対する応募を受信する工程と、を更に含み、
前記1以上の選択ロボット及び前記1以上の選択操作端末を選択する工程は、前記仲介装置によって、前記応募の応募要項が前記募集の募集要項に適合するか否かを判定し、前記複数のロボット及び前記複数の操作端末から、前記応募の応募要項と前記募集の募集要項とが互いに適合する前記1以上のロボット及び前記1以上の操作端末を、前記1以上の選択ロボット及び前記1以上の選択操作端末として選択する工程である、仲介方法。
【請求項4】
複数の遠隔作業者が操作する複数の操作端末と1以上のロボット保有者が保有する複数のロボットとにデータ通信可能なネットワークを介して接続された、仲介者が有する仲介装置を用いた仲介方法であって、
前記仲介方法は、
前記仲介装置によって、前記複数のロボット及び前記複数の操作端末から、1以上の前記ロボット及び1以上の前記操作端末を、1以上の選択ロボット及び1以上の選択操作端末として選択する工程と、
前記仲介装置によって、前記1以上の選択操作端末によって前記1以上の選択ロボットを操作することが可能なように、前記複数の作業の形態に応じて、前記1以上の選択操作端末を前記1以上の選択ロボットに、n(nは2以上の自然数)対1、1対m(mは2以上の自然数)、及びn対mの少なくともいずれかの関係で接続する工程と、を含み、
前記仲介装置によって、前記複数のロボットから、当該複数のロボットを操作して複数の作業を行う遠隔作業者に対する募集要項を受信する工程と、
前記仲介装置によって、前記複数の操作端末から、当該複数の操作端末を操作する前記複数の遠隔作業者の就労要項を受信する工程と、を更に含み、
前記1以上の選択ロボット及び前記1以上の選択操作端末を選択する工程は、前記仲介装置によって、前記複数の募集要項と前記複数の就労要項とを対比し、前記募集要項と前記就労要項とが互いに適合する前記1以上のロボット及び前記1以上の操作端末を、前記1以上の選択ロボット及び前記1以上の選択操作端末として選択する工程である、仲介方法。
【請求項5】
請求項3又は4に記載された仲介方法をプロセッサに実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、仲介装置及びそれを用いた仲介方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来から遠隔操作されるロボットが知られている。例えば、特許文献1に記載された遠隔マニピュレータシステムでは、ロボットマニピュレータが遠隔制御ステーションのオペレーターによって、操作される。
【先行技術文献】
【特許文献】
【0003】
特開2017-061032公開特許公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記遠隔操作ロボットを含むロボットは、社会において、あまり広く利用されていない。従って、遠隔操作ロボットの利用拡大を図る必要がある。
【0005】
本発明はこのような課題を解決するためになされたもので、遠隔操作ロボットの利用拡大を図ることが可能な仲介装置及びこれを用いた仲介方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明者等は、上記課題を鋭意検討した。その結果、以下の知見を得た。
【0007】
遠隔操作ロボットの利用拡大を図るためには、ロボットの適用分野を拡大するだけではなく、社会における製造業に携わる人々以外のより多くの人々がロボットに触れる機会を増やす施策が必要である。
【0008】
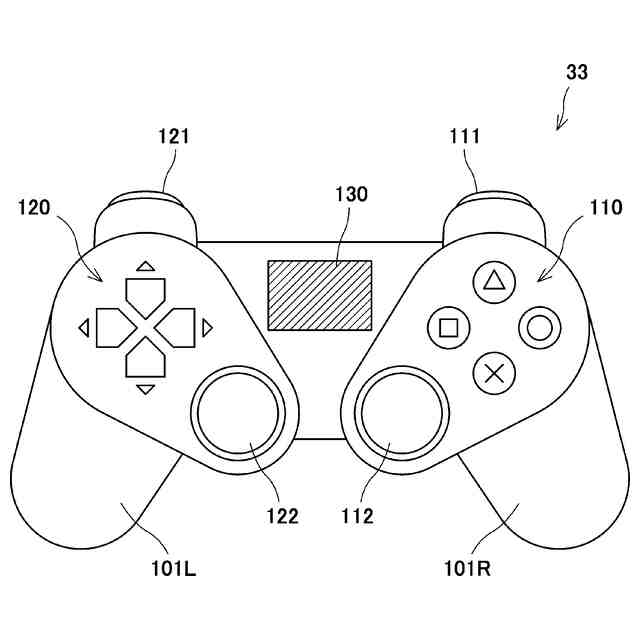
社会には、やむを得ない事情(子育て、介護、病気、障害、体力の衰え等)で、就労していない人々(以下、特定未就労者と呼ぶ)がいる。その中には、例えば、ゲームにおけるゲームコントローラの操作に関して格別に優れたスキルを持ったゲーマー(game player)が存在するように、ロボット操作に関して格別に優れたスキルを持った人が存在すると想定される。
【0009】
そこで、本発明者等は、彼らがロボットに触れる機会を作り、彼らに社会貢献をさせることを想到した。
【0010】
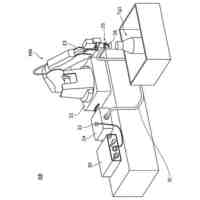
具体的には、例えば、彼らが、自宅にいながら、ゲームコントローラでインターネットを介して産業用ロボットを操作し、その対価として労働賃金を得る。一般的に、産業用ロボットの操作器は、高機能で且つ高価なコミュニケータであり、一般人が入手できない。一方、ゲームコントローラは、キー操作による相対的に低機能の操作器であり、一般人が数万円程度で入手できる。しかも、ゲームコントローラのキー操作による操作信号を産業用ロボットの動作指令に変換してやれば、ゲームコントローラの操作者がその信号変換に合わせてロボットを上手く操作してくれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
7日前
株式会社マキタ
電動工具
15日前
株式会社マキタ
電動工具
今日
日本車輌製造株式会社
締め付け工具
15日前
川崎重工業株式会社
ロボットアーム
15日前
川崎重工業株式会社
ロボットアーム
15日前
川崎重工業株式会社
ロボットリスト
15日前
川崎重工業株式会社
ロボットシステム
15日前
日本信号株式会社
作業機制御システム
今日
株式会社京阪エンジニアリング
脱着装置
1日前
株式会社スター精機
ワーク搬送装置
4日前
株式会社マキタ
集塵アタッチメント
今日
川崎重工業株式会社
ロボットシステム
7日前
トヨタ自動車株式会社
制御装置及び制御方法
15日前
株式会社マキタ
電動工具
7日前
川崎重工業株式会社
多関節ロボット
今日
川崎重工業株式会社
多関節ロボット
今日
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
4日前
白山工業株式会社
非平行4節リンク型指機構及びグリッパ
8日前
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
8日前
ソフトバンクグループ株式会社
ロボット
15日前
ファナック株式会社
ロボット組立て技能学習方法
2日前
株式会社イチネンアクセス
ソケットおよび回転工具
15日前
日本信号株式会社
ケーブル中継モジュール及び多関節ロボット
今日
セイコーエプソン株式会社
印刷方法およびロボットシステム
15日前
国立大学法人九州工業大学
搬送ロボットの制御方法
8日前
セイコーエプソン株式会社
ロボットシステムおよび位置検出方法
15日前
コニカミノルタ株式会社
プログラム及び教示支援装置
14日前
三菱重工業株式会社
把持装置及び把持装置の制御方法
8日前
コニカミノルタ株式会社
プログラム及び教示支援装置
7日前
ファナック株式会社
ロボット技能学習のための効率の良い方法
2日前
東京電力ホールディングス株式会社
長尺アーム
15日前
株式会社SHIN‐JIGEN
上肢アシスト装置背負い具及び上肢アシスト装置ユニット
7日前
パナソニックIPマネジメント株式会社
吸着判定方法および吸着判定装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ