TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021014
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124691
出願日
2023-07-31
発明の名称
把持装置及び把持装置の制御方法
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
15/06 20060101AFI20250205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】搬送能力を向上させることができる把持装置及び把持装置の制御方法を提供する。
【解決手段】把持装置は、物品の上面に吸着可能な第1吸着面を有する上面把持部と、前記物品の側面に吸着可能な第2吸着面を有する側面把持部と、前記側面把持部を前記上面把持部の下端より下方に位置付ける第1状態と、前記側面把持部を前記上面把持部の下端より上方に位置付ける第2状態と、を切り替え可能な跳ね上げ機構と、を備える。
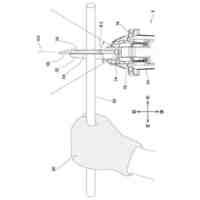
【選択図】図1
特許請求の範囲
【請求項1】
物品の上面に吸着可能な第1吸着面を有する上面把持部と、
前記物品の側面に吸着可能な第2吸着面を有する側面把持部と、
前記側面把持部を前記上面把持部の下端より下方に位置付ける第1状態と、前記側面把持部を前記上面把持部の下端より上方に位置付ける第2状態と、を切り替え可能な跳ね上げ機構と、
を備える、把持装置。
続きを表示(約 1,300 文字)
【請求項2】
前記第1吸着面が前記物品の上面に当接している状態において前記第1吸着面における吸着を作動させる第1吸着機構と、
前記第2吸着面が前記物品の側面に当接している状態において前記第2吸着面における吸着を作動させる第2吸着機構と、
を備える、請求項1に記載の把持装置。
【請求項3】
前記跳ね上げ機構は、前記側面把持部を前記第2状態の位置で位置決めするロック機構を有する
請求項1に記載の把持装置。
【請求項4】
前記跳ね上げ機構は、前記第1吸着面及び前記第2吸着面に平行かつ前記第1状態における前記側面把持部より上方に位置する第1回転軸回りに前記側面把持部を回動させる、
請求項1に記載の把持装置。
【請求項5】
一端側が前記側面把持部に連結するとともに、前記第2吸着面に垂直な第1方向に伸縮可能な第1腕部と、
一端側が前記第1腕部の他端側に連結しかつ他端側が前記跳ね上げ機構を介して前記上面把持部に連結するとともに、前記第2吸着面に平行かつ前記第1回転軸に直交する第2方向に伸縮可能な第2腕部と、
を備える、請求項4に記載の把持装置。
【請求項6】
前記跳ね上げ機構は、前記第1吸着面に垂直な方向に前記側面把持部を並進移動させる、
請求項1に記載の把持装置。
【請求項7】
前記上面把持部及び前記側面把持部を垂直な第2回転軸回りに回動させる旋回機構を備える、
請求項1に記載の把持装置。
【請求項8】
請求項1から7のいずれか1項に記載の把持装置の制御方法であって、
前記把持装置による搬送対象の物品に関するデータを示す搬送対象データを取得する搬送対象データ取得ステップと、
荷降ろしする対象の物品又は物品を積み付ける領域を含む所定領域を撮像した撮像画像データを取得する撮像画像データ取得ステップと、
前記搬送対象データに基づいて、前記物品の搬送に前記側面把持部による前記物品の側面把持が必要か否かを判断する判断ステップと、
前記判断ステップで側面把持が不要であると判断された場合に前記側面把持部を前記第2状態に切り替える切り替えステップと、
前記物品を少なくとも前記上面把持部で支持して搬送する搬送ステップと、
を含む、把持装置の制御方法。
【請求項9】
前記切り替えステップでは、前記撮像画像データに基づいて、前記物品の周囲に前記側面把持部に干渉し得る障害物の有無を判断し、前記障害物がある場合、前記側面把持部が前記障害物を回避可能な位置まで前記側面把持部を前記上面把持部に対して移動させる、
請求項8に記載の把持装置の制御方法。
【請求項10】
前記搬送対象データは、物品の数と、各々の物品を積み付ける位置又は荷下ろす物品の各々の位置と、各々の物品を積み付ける順番又は各々の物品を荷下ろす順番と、を含み、
前記搬送対象データ取得ステップの後、前記撮像画像データ取得ステップと、前記判断ステップと、前記切り替えステップと、前記搬送ステップと、を繰り返し実行する、
請求項8に記載の把持装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持装置及び把持装置の制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
パレット等のトレイに物品を積み付けするパレタイズ装置等の搬送装置が知られている。例えば、特許文献1には、搬送装置において、物品の上面及び側面に吸着して把持する把持装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-179338号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の把持装置は、物品を把持していない状態では、コイルバネの付勢力により、側面パッドの吸着面と上面パッドの吸着面とのなす角度が93度以上135度以下となり、物品を把持している状態では、側面パッドが物品の側面に吸着する。すなわち、軽量の物品や小さい物品等、側面パッドによる支持を必要としない物品であっても、他の物品と側面パッドとの干渉を避けるために、平面視における側面パッドの位置を変更しながら、四隅に積み付ける、又は四隅から荷降ろしする必要がある。
【0005】
本開示は、上述した課題を解決するものであり、搬送能力を向上させることができる把持装置及び把持装置の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
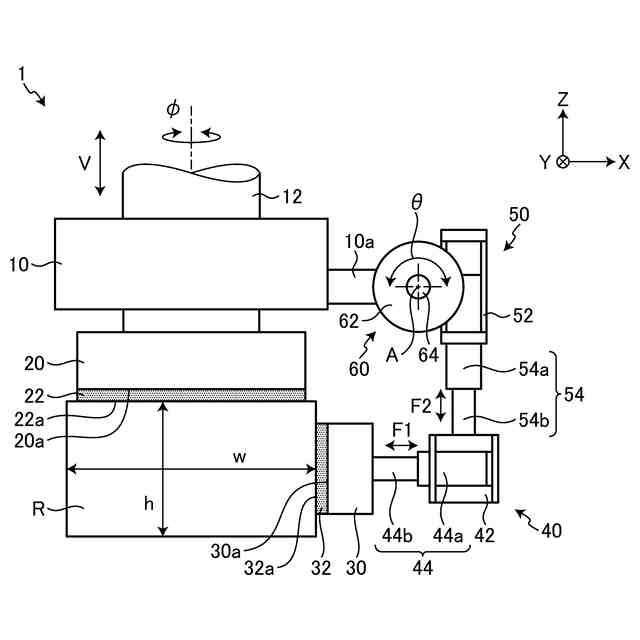
上述の目的を達成するために、本開示の一態様に係る把持装置は、物品の上面に吸着可能な第1吸着面を有する上面把持部と、前記物品の側面に吸着可能な第2吸着面を有する側面把持部と、前記側面把持部を前記上面把持部の下端より下方に位置付ける第1状態と、前記側面把持部を前記上面把持部の下端より上方に位置付ける第2状態と、を切り替え可能な跳ね上げ機構と、を備える。
【0007】
上述の目的を達成するために、本開示の一態様に係る把持装置の制御方法は、前記把持装置による搬送対象の物品に関するデータを示す搬送対象データを取得する搬送対象データ取得ステップと、荷降ろしする対象の物品又は物品を積み付ける領域を含む所定領域を撮像した撮像画像データを取得する撮像画像データ取得ステップと、前記搬送対象データに基づいて、前記物品の搬送に前記側面把持部による前記物品の側面把持が必要か否かを判断する判断ステップと、前記判断ステップで側面把持が不要であると判断された場合に前記側面把持部を前記第2状態に切り替える切り替えステップと、前記物品を少なくとも前記上面把持部で支持して搬送する搬送ステップと、を含む。
【発明の効果】
【0008】
本開示によれば、搬送能力を向上させるという効果を得ることができる。
【図面の簡単な説明】
【0009】
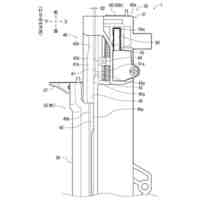
図1は、本実施形態に係る把持装置の模式図である。
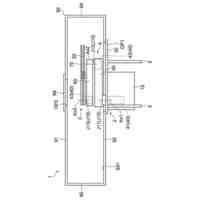
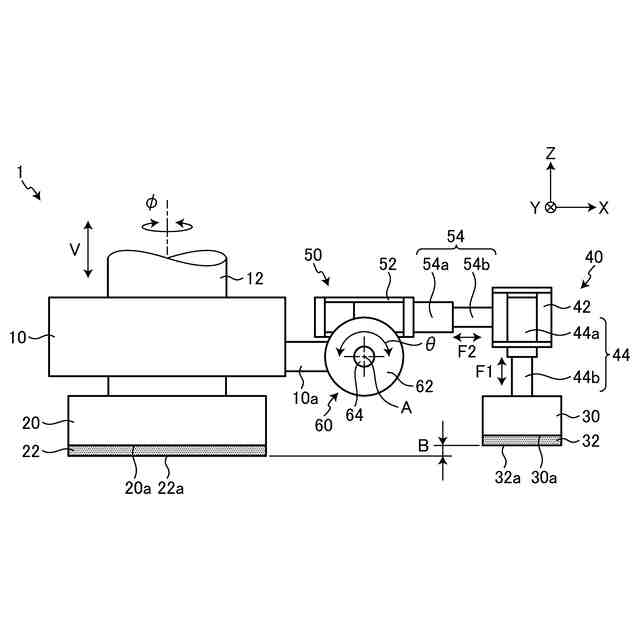
図2は、図1に示す把持装置の90°跳ね上げ態様を示す模式図である。
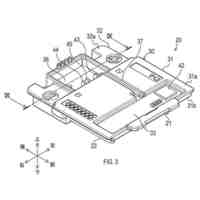
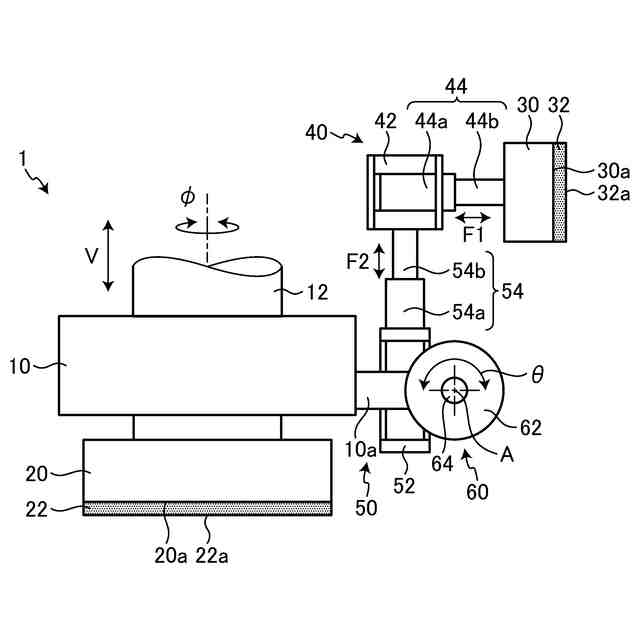
図3は、図1に示す把持装置の180°跳ね上げ態様を示す模式図である。
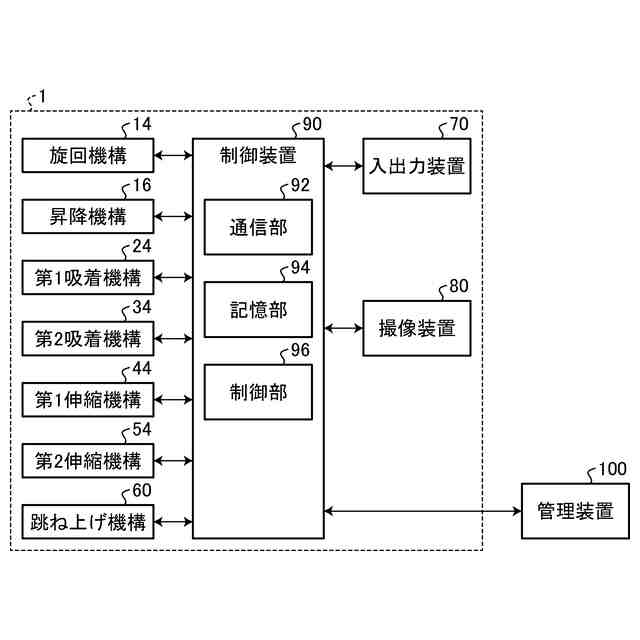
図4は、図1に示す把持装置の模式的なブロック図である。
図5は、制御装置の処理フローを説明するフローチャートである。
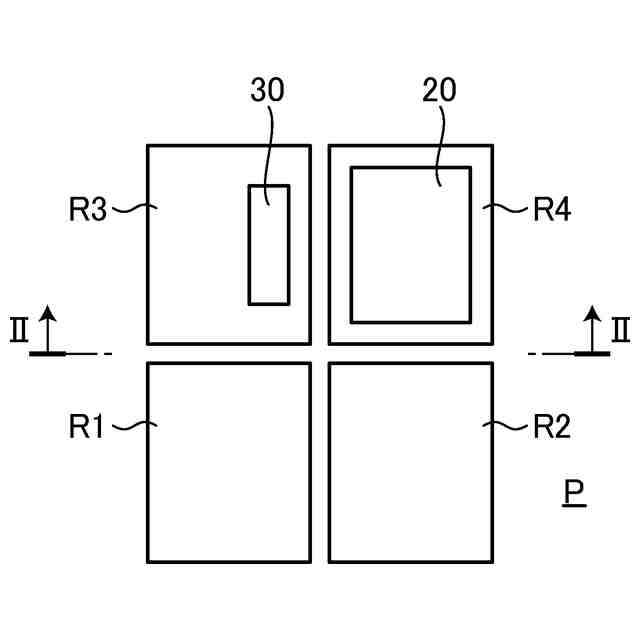
図6は、把持装置による荷降ろし動作を模式的に説明する平面図である。
図7は、図6に示すII-II線に沿う断面図である。
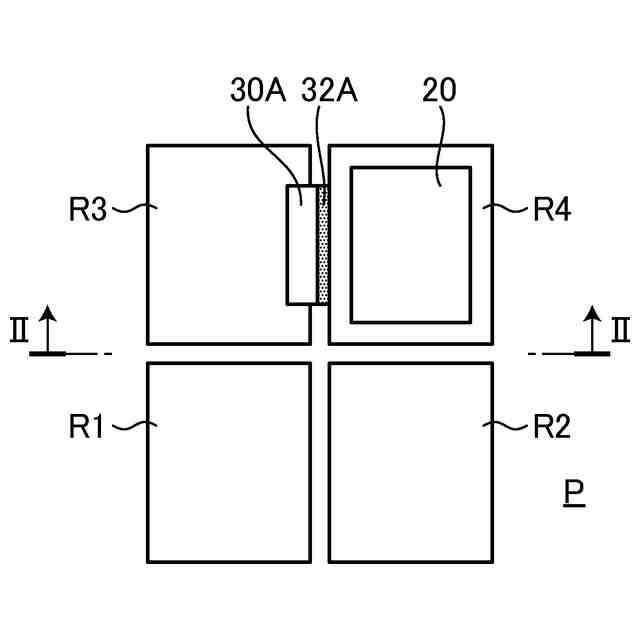
図8は、図7の後の状態を示す断面図である。
図9は、比較例の把持装置による荷降ろし動作を模式的に説明する平面図である。
図10は、図9に示すII-II線に沿う断面図である。
図11は、比較例の把持装置による荷降ろし動作を模式的に説明する平面図である。
図12は、図11に示すII-II線に沿う断面図である。
【0010】
(実施形態)
以下に、本開示に係る実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、実質的に同一のもの、あるいは均等の範囲のものが含まれる。更に、下記実施形態における構成要素は、本開示の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。下記実施形態では、実施形態を例示する上で、必要となる構成要素を説明し、その他の構成要素を省略するとともに、同一構成には同一符号を付し、異なる構成には異なる符号を付すものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
8日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
16日前
日本車輌製造株式会社
締め付け工具
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットリスト
16日前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
1日前
川崎重工業株式会社
ロボットシステム
16日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
29日前
株式会社京阪エンジニアリング
脱着装置
2日前
株式会社マキタ
集塵アタッチメント
1日前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
5日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
16日前
モトコマ株式会社
寄せポンチホルダー
17日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
8日前
個人
ターンバックル用工具
23日前
有限会社松尾エンジニアリング
連結部材
17日前
株式会社DailyColor
ロボットハンド
17日前
株式会社SHIN‐JIGEN
上肢アシスト装置
22日前
株式会社マキタ
作業機
29日前
株式会社マキタ
電動工具
8日前
株式会社マキタ
バッテリ駆動式機器
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
ネジ締め工具
1か月前
株式会社マキタ
打ち込み工具
1か月前
株式会社安川電機
ロボット及び基板搬送装置
1か月前
川崎重工業株式会社
多関節ロボット
1日前
馳逸自動化科技(蘇州)有限公司
物品ピッキングロボット
29日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ