TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025024475
公報種別
公開特許公報(A)
公開日
2025-02-20
出願番号
2023128614
出願日
2023-08-07
発明の名称
吸着判定方法および吸着判定装置
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人栄光事務所
主分類
B25J
15/06 20060101AFI20250213BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物の吸着判定をより高精度に実行する。
【解決手段】吸着判定方法は、少なくとも1つの振動センサと、吸着部で対象物を吸着するロボットとの間で通信可能な端末装置が行い、吸着部に接続された真空ポンプまたは吸着部に取り付けられた振動センサにより収集された振動データを取得し、振動データに基づいて、吸着部が対象物を吸着しているか否かを判定した判定結果を出力する。
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも1つの振動センサと、
吸着部で対象物を吸着するロボットとの間で通信可能な端末装置が行う吸着判定方法であって、
前記吸着部に接続された真空ポンプまたは前記吸着部に取り付けられた前記振動センサにより収集された振動データを取得し、
前記振動データに基づいて、前記吸着部が前記対象物を吸着しているか否かを判定した判定結果を出力する、
吸着判定方法。
続きを表示(約 1,300 文字)
【請求項2】
前記真空ポンプに取り付けられた前記振動センサにより収集された前記真空ポンプの振動データを取得し、
前記真空ポンプの振動データに基づいて、前記吸着部が前記対象物を吸着しているか否かを判定する、
請求項1に記載の吸着判定方法。
【請求項3】
前記吸着部は、前記対象物を撮像可能なカメラを備え、
前記カメラにより撮像された撮像画像を取得し、
前記振動データに基づく前記判定結果と、前記撮像画像とを対応付けてデータベースに記録する、
請求項1に記載の吸着判定方法。
【請求項4】
前記吸着部に取り付けられた前記振動センサにより収集された前記吸着部の振動データを取得し、
前記吸着部の振動データに基づいて、前記吸着部が前記対象物を吸着しているか否かを判定する、
請求項1に記載の吸着判定方法。
【請求項5】
前記真空ポンプおよび前記吸着部にそれぞれ取り付けられた複数の前記振動センサから前記真空ポンプの振動データと前記吸着部の振動データとを取得し、
前記真空ポンプの振動データおよび前記吸着部の振動データに基づいて、前記吸着部が前記対象物を吸着しているか否かを判定する、
請求項1に記載の吸着判定方法。
【請求項6】
前記振動センサにより収集された前記真空ポンプの振動データと、事前に収集された前記対象物に対応する前記真空ポンプの振動データとに基づいて、前記吸着部が前記対象物を吸着しているか否かを判定する、
請求項2に記載の吸着判定方法。
【請求項7】
前記振動データに基づいて、前記真空ポンプの異常を検出する、
請求項1に記載の吸着判定方法。
【請求項8】
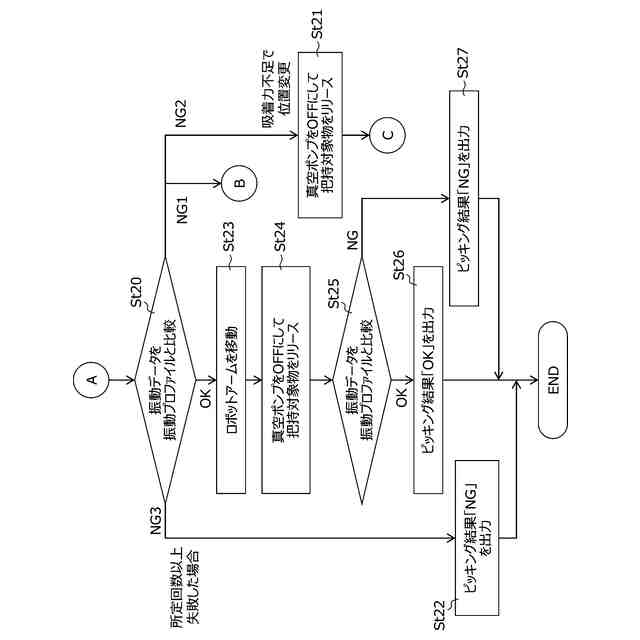
前記吸着部が前記対象物を吸着していないと判定した場合、前記振動データに基づいて、前記吸着部に設けられ、前記対象物を吸着する吸着部材と前記対象物とが接触したか否かをさらに判定し、
前記吸着部材と前記対象物とが接触していないと判定した場合、前記対象物を吸着する前記吸着部材の吸着高さを変更させる制御指令を生成して、前記ロボットに送信する、
請求項1に記載の吸着判定方法。
【請求項9】
前記吸着部が前記対象物を吸着していないと判定した場合、前記振動データに基づいて、前記吸着部に設けられ、前記対象物を吸着する吸着部材と前記対象物とが接触したか否かをさらに判定し、
前記吸着部材と前記対象物とが接触していると判定した場合、前記対象物を吸着する吸着位置を変更させる制御指令を生成して、前記ロボットに送信する、
請求項1に記載の吸着判定方法。
【請求項10】
前記吸着部が前記対象物を吸着していないと判定した場合、前記振動データに基づいて、前記吸着部が前記対象物を吸着しているか否かの判定を繰り返し実行し、
前記吸着部が前記対象物を吸着していないと判定した回数が所定回数以上であると判定した場合、前記対象物の吸着を失敗した旨の判定結果を生成して出力する、
請求項1に記載の吸着判定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、吸着判定方法および吸着判定装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、吸引パッドと、吸引パッドのパッド内を減圧する真空ポンプと、真空ポンプが発生させた駆動音を取得するマイクと、マイクが取得した真空ポンプの駆動音に応じて、吸引パッドの減圧の状態を判定する演算制御部と、を備える、負圧検出システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-221468号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、上述した従来の事情に鑑みて案出され、対象物の吸着判定をより高精度に実行する吸着判定方法および吸着判定装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本開示は、少なくとも1つの振動センサと、吸着部で対象物を吸着するロボットとの間で通信可能な端末装置が行う吸着判定方法であって、前記吸着部に接続された真空ポンプまたは前記吸着部に取り付けられた前記振動センサにより収集された振動データを取得し、前記振動データに基づいて、前記吸着部が前記対象物を吸着しているか否かを判定した判定結果を出力する、吸着判定方法を提供する。
【0006】
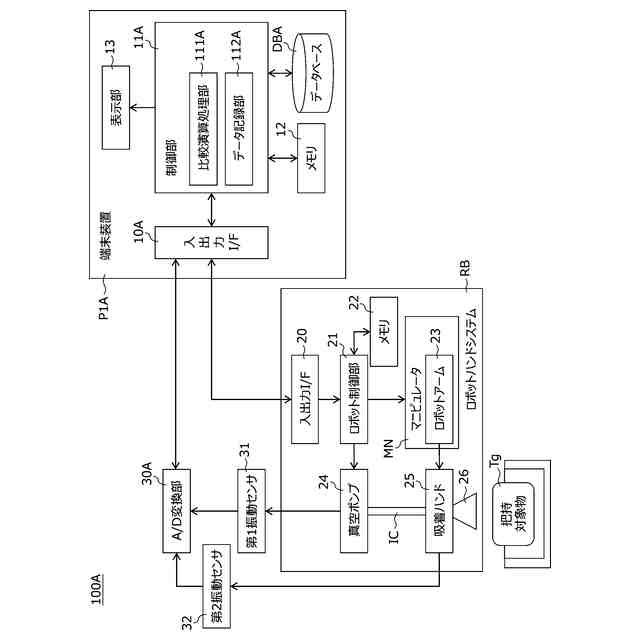
また、本開示は、少なくとも1つの振動センサと、吸着部で対象物を吸着するロボットとの間で通信可能な吸着判定装置であって、前記吸着部に接続された真空ポンプまたは前記吸着部に取り付けられた前記振動センサにより収集された振動データを取得する取得部と、前記振動データに基づいて、前記吸着部が前記対象物を吸着しているか否かを判定した判定結果を出力する制御部と、を備える、吸着判定装置を提供する。
【発明の効果】
【0007】
本開示によれば、対象物の吸着判定をより高精度に実行できる。
【図面の簡単な説明】
【0008】
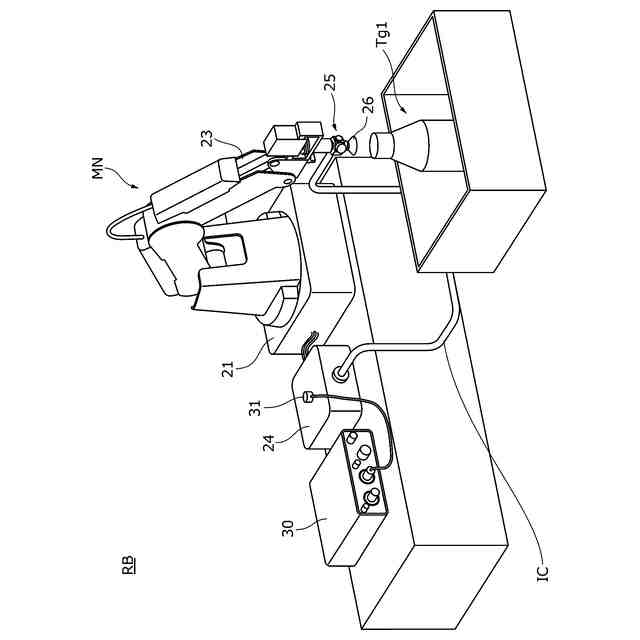
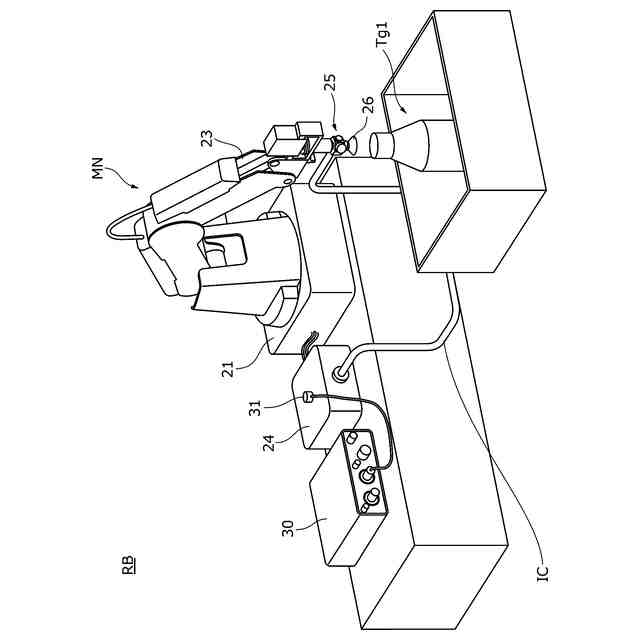
実施の形態1におけるロボットハンドシステムのユースケース例を示す図
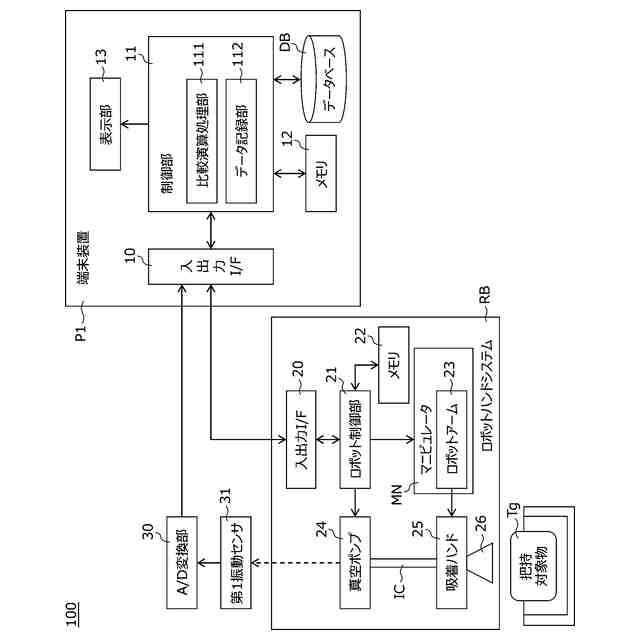
実施の形態1に係るロボットシステムの全体構成例を示すブロック図
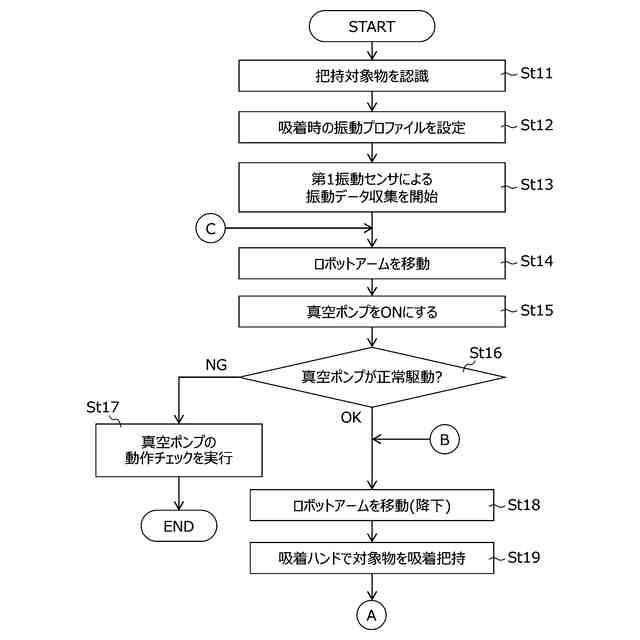
実施の形態1における端末装置の動作手順例を示すフローチャート
実施の形態1における端末装置の動作手順例を示すフローチャート
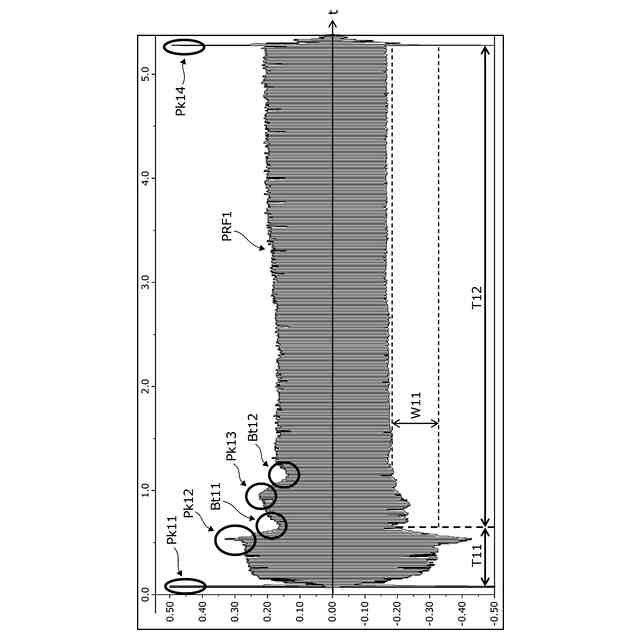
振動プロファイルの一例を示す図
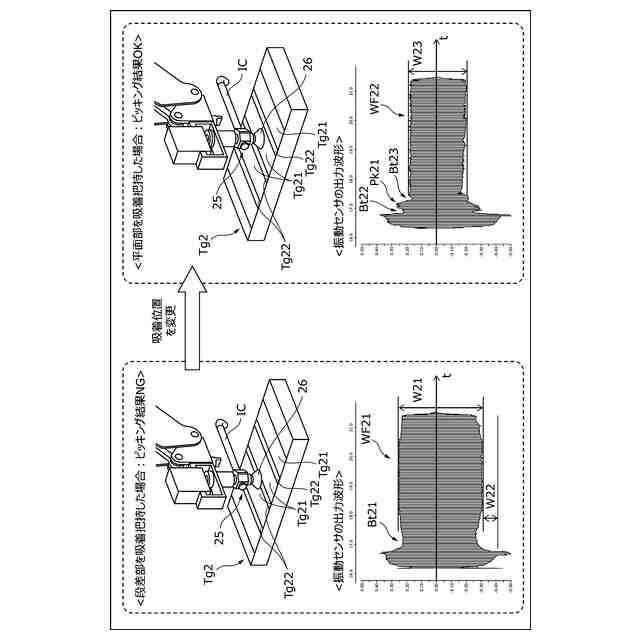
吸着位置に基づくピッキング結果「NG」およびピッキング結果「OK」のそれぞれの振動データ例を説明する図
把持対象物との接触時および非接触時のそれぞれの振動データ例を比較する図
実施の形態2におけるロボットハンドシステムのユースケース例を示す図
実施の形態2に係るロボットシステムの全体構成例を示すブロック図
実施の形態2における端末装置の動作手順例を示すフローチャート
実施の形態2における端末装置の動作手順例を示すフローチャート
把持対象物との接触時および非接触時のそれぞれの振動データ例を比較する図
把持対象物との接触状態に対応する各種振動データを比較する図
外力を受けた場合の吸着部の振動データ例を示す図
実施の形態3におけるロボットハンドシステムのユースケース例を示す図
実施の形態3に係るロボットシステムの全体構成例を示すブロック図
実施の形態3における端末装置の動作手順例を示すフローチャート
実施の形態3における端末装置の動作手順例を示すフローチャート
実施の形態4におけるロボットハンドシステムのユースケース例を示す図
実施の形態4に係るロボットシステムの全体構成例を示すブロック図
実施の形態4における端末装置の動作手順例を示すフローチャート
実施の形態4における端末装置の動作手順例を示すフローチャート
【発明を実施するための形態】
【0009】
(本開示に至る経緯)
従来、ワーク(以降、「把持対象物」と表記)を吸着可能な吸引パッドのパッド内を減圧する真空ポンプの駆動音をマイクで収音し、収音された駆動音に基づいて、吸引パッドによる把持対象物の吸着状態を検出する負圧検出システムがある。負圧検出システムは、収音された真空ポンプの駆動音の音量あるいは周波数と、予め記憶された閾値との比較に基づいて、吸引パッドによる把持対象物の吸着判定を実行する。
【0010】
しかし、真空ポンプの近傍に配置されたマイクにより収音される駆動音は、空気(大気)を介して間接的に収音される。そのため、真空ポンプとマイクの距離によって駆動音は減衰し、収音された駆動音は分解能が低くなる。また、マイクは、周囲の環境音等の外乱を収音しやすい。よって、負圧検出システムは、吸着状態を高精度に検出することが困難だった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
8日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
16日前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
搬送装置
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットアーム
16日前
日本車輌製造株式会社
締め付け工具
16日前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボットリスト
16日前
川崎重工業株式会社
ロボットシステム
16日前
日本信号株式会社
作業機制御システム
1日前
CKD株式会社
吸着型搬送装置
1か月前
学校法人立命館
ロボットハンド
3か月前
長堀工業株式会社
締結装置
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
29日前
株式会社京阪エンジニアリング
脱着装置
2日前
株式会社アイエイアイ
グリッパー
2か月前
株式会社安川電機
ロボット
1か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社マキタ
集塵アタッチメント
1日前
株式会社スター精機
ワーク搬送装置
5日前
モトコマ株式会社
寄せポンチホルダー
17日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































