TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019798
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123623
出願日
2023-07-28
発明の名称
プログラム及び教示支援装置
出願人
コニカミノルタ株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
B25J
9/22 20060101AFI20250131BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本発明の目的は、ロボットの関節が無駄な動きをしないようにすることである。
【解決手段】プログラムが、プロセッサーに取得処理、算出処理、組み合わせ処理、パス作成処理及び評価処理を実行させる。パス作成処理では、プロセッサーが、複数の姿勢セットのそれぞれに基づいて、複数のノードのうち1番のノードに選定された関節角セットの各関節の角度から、複数のノードのうち最後のノードに選定された関節角セットの各関節の角度までの離散的なパスを前記複数の関節のそれぞれについて作成することによって、前記複数の関節のそれぞれの前記パスからなる複数のパスセットを前記複数の姿勢セットのそれぞれについて作成する。評価処理では、プロセッサーが、前記複数のパスセットのそれぞれの評価に基づいて前記複数のパスセットの中から1つを選択する。
【選択図】図2
特許請求の範囲
【請求項1】
プロセッサーに、
複数の関節及びエンドエフェクターを有する多関節ロボットの前記エンドエフェクターの位置情報及び姿勢情報を含む複数のノードを順次取得する取得処理と、
前記取得処理により取得された前記複数のノードのそれぞれについて、前記複数のノードのそれぞれに含まれる前記位置情報及び前記姿勢情報から、前記複数の関節の角度を表現する複数の関節角セットを算出する算出処理と、
前記複数のノードのそれぞれについて前記複数の関節角セットの中から選定された関節角セットを前記複数のノードの順番に組み合わせて紐付けた複数の姿勢セットを作成する組み合わせ処理と、
前記複数の姿勢セットのそれぞれに基づいて、前記複数のノードのうち1番のノードに選定された関節角セットの各関節の角度から、前記複数のノードのうち最後のノードに選定された関節角セットの各関節の角度までの離散的なパスを前記複数の関節のそれぞれについて作成することによって、前記複数の関節のそれぞれの前記パスからなる複数のパスセットを前記複数の姿勢セットのそれぞれについて作成するパス作成処理と、
前記複数のパスセットのそれぞれの評価に基づいて前記複数のパスセットの中から1つを選択する評価処理と、
を実行させるプログラム。
続きを表示(約 1,700 文字)
【請求項2】
前記評価処理における前記複数のパスセットのそれぞれの評価は、複数の評価基準に従った評価の総合評価である
請求項1に記載のプログラム。
【請求項3】
前記評価処理は、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの要素総数の積算値に基づいて評価する処理
を含む
請求項1に記載のプログラム。
【請求項4】
前記評価処理は、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの要素の中から抽出された極小値及び極大値の差分の絶対値の積算値に基づいて評価する処理、
を含む
請求項1に記載のプログラム。
【請求項5】
前記評価処理は、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの要素の中から抽出された最大値と前記関節の最大限界角との差分の絶対値と、前記複数のパスセットのそれぞれに含まれるパスの要素の中から抽出された最小値と前記関節の最小限界角との差分の絶対値と、を積算した積算値に基づいて評価する処理
を含む
請求項1に記載のプログラム。
【請求項6】
前記評価処理は、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれ及び前記多関節ロボットの特異姿勢データから求まる最小可操作度に基づいて評価する処理
を含む
請求項1に記載のプログラム。
【請求項7】
前記評価処理は、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの各要素とそれよりも一つ前の要素との差分のうち最大差分に基づいて評価する処理
を含む
請求項1に記載のプログラム。
【請求項8】
前記評価処理は、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの要素総数の積算値に基づいて評価する第1評価処理と、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの要素の中から抽出された極小値及び極大値の差分の絶対値の積算値に基づいて評価する第2評価処理と、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの要素の中から抽出された最大値と前記関節の最大限界角との差分の絶対値と、前記複数のパスセットのそれぞれに含まれるパスの要素の中から抽出された最小値と前記関節の最小限界角との差分の絶対値と、を積算した積算値に基づいて評価する第3評価処理と、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれ及び前記多関節ロボットの特異姿勢データから求まる最小可操作度に基づいて評価する第4評価処理と、
前記複数のパスセットのそれぞれについて、前記複数のパスセットのそれぞれに含まれるパスの各要素とそれよりも一つ前の要素との差分のうち最大差分に基づいて評価する第5評価処理と、
前記第1評価処理、前記第2評価処理、前記第3評価処理、前記第4評価処理及び前記第5評価処理による評価を総合評価することによって、前記複数のパスセットの中から最も総合評価の良いパスセットを選択する総合評価処理と、
を含む
請求項1に記載のプログラム。
【請求項9】
前記総合評価処理は、
前記第1評価処理、前記第2評価処理、前記第3評価処理、前記第4評価処理及び前記第5評価処理による評価に重みを付けて総合評価する処理
を含む
請求項8に記載のプログラム。
【請求項10】
前記評価処理は、
作業者による操作に従って、前記第1評価処理、前記第2評価処理、前記第3評価処理、前記第4評価処理及び前記第5評価処理のそれぞれの採否を決定する処理
を含む
請求項8に記載のプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、プログラム及び教示支援装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
特許文献1は、作業者がロボットに教示することを支援する教示支援装置を開示する。作業者が、教示支援装置の入力部を用いて、複数の移動点をそれぞれ特定する複数の移動点情報を教示支援装置に入力する。教示支援装置の演算部が、移動点ごとに複数の解候補を演算する。解候補とは、ロボットがその手先を移動点に配置したときにそのロボットが取る姿勢をロボットの各関節の角度により表現したデータをいう。その後、教示支援装置の演算部は、移動点の1つの解候補とそれに隣接する移動点の1つの解候補とからなる全ての組み合わせのそれぞれについて、評価値を演算する。教示支援装置の演算部は、最初の移動点から最後の移動点までの解候補からなる複数の組み合わせの中から、最も高い累積評価値を有する組み合わせを最適と認定する。この教示支援装置の演算部は、最適な組み合わせの解候補を結ぶパスを算出するものではない。パスとは、最初の解候補の角度から最後の解候補の角度までの各関節の角度の推移を離散的に表すデータである。
【0003】
特許文献2は、ロボットコントローラーがロボットを動作させるために実行する動作プログラムを生成するプログラミング支援装置を開示する。プログラミング支援装置は、ロボットの動作の開始点からロボットの動作の終了点までのロボットの一連の動作を表す全体パスを生成する。この全体パスは、順に第1作業パス、エアカットパス及び第2作業パスを少なくとも含む。第1及び第2の作業パスは、ロボットがワークピースに対して処理するためのパスである。エアカットパスは、第1の作業パスと第2の作業パスを繋ぐパスである。エアカットパスは、ワークピースに対する処理を伴わないパスである。プログラミング支援装置は、第1作業パスの終点となる退避域における複数の候補退避姿勢を抽出する。プログラミング支援装置は、第2作業パスの終点となるアプローチ域における複数の候補アプローチ姿勢を抽出する。プログラミング支援装置は、1つの候補退避姿勢と1つの候補アプローチ姿勢とからなる複数の組み合わせから、複数の候補パスをそれぞれ生成する。プログラミング支援装置は、動作時間の観点からこれら候補パスを評価する。プログラミング支援装置は、複数の候補パスの中から、最小の動作時間を実現する候補パスを選択する。プログラミング支援装置は、選択済みの候補パスをエアカットパスに定める。このプログラミング支援装置は、ロボットの動作の開始点からロボットの動作の終了点までの複数の全体パス候補を評価することによって何れかの全体パス候補を選択するものではない。そのため、ロボットが開始点から終了点まで動作するまでに、ロボットの関節が無駄な動きをする虞がある。
【先行技術文献】
【特許文献】
【0004】
JP 2007-203380 A
JP 2022-76814 A
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、本発明の1以上の実施形態の目的は、ロボットの関節が無駄な動きをしないようにすることである。
【課題を解決するための手段】
【0006】
以上の課題を解決するために、本発明の一側面によれば、プログラムが、プロセッサーに、
複数の関節及びエンドエフェクターを有する多関節ロボットの前記エンドエフェクターの位置情報及び姿勢情報を含む複数のノードを順次取得する取得処理と、
前記取得処理により取得された前記複数のノードのそれぞれについて、前記複数のノードのそれぞれに含まれる前記位置情報及び前記姿勢情報から、前記複数の関節の角度を表現する複数の関節角セットを算出する算出処理と、
前記複数のノードのそれぞれについて前記複数の関節角セットの中から選定された関節角セットを前記複数のノードの順番に組み合わせて紐付けた複数の姿勢セットを作成する組み合わせ処理と、
前記複数の姿勢セットのそれぞれに基づいて、前記複数のノードのうち1番のノードに選定された関節角セットの各関節の角度から、前記複数のノードのうち最後のノードに選定された関節角セットの各関節の角度までの離散的なパスを前記複数の関節のそれぞれについて作成することによって、前記複数の関節のそれぞれの前記パスからなる複数のパスセットを前記複数の姿勢セットのそれぞれについて作成するパス作成処理と、
前記複数のパスセットのそれぞれの評価に基づいて前記複数のパスセットの中から1つを選択する評価処理と、
を実行させる。
【0007】
以上の課題を解決するために、本発明の一側面によれば、教示支援装置が、プロセッサーを備え、
前記プロセッサーが、
複数の関節及びエンドエフェクターを有する多関節ロボットの前記エンドエフェクターの位置情報及び姿勢情報を含む複数のノードを順次取得する取得処理と、
前記取得処理により取得された前記複数のノードのそれぞれについて、前記複数のノードのそれぞれに含まれる前記位置情報及び前記姿勢情報から、前記複数の関節の角度を表現する複数の関節角セットを算出する算出処理と、
前記複数のノードのそれぞれについて前記複数の関節角セットの中から選定された関節角セットを前記複数のノードの順番に組み合わせて紐付けた複数の姿勢セットを作成する組み合わせ処理と、
前記複数の姿勢セットのそれぞれに基づいて、前記複数のノードのうち1番のノードに選定された関節角セットの各関節の角度から、前記複数のノードのうち最後のノードに選定された関節角セットの各関節の角度までの離散的なパスを前記複数の関節のそれぞれについて作成することによって、前記複数の関節のそれぞれの前記パスからなる複数のパスセットを前記複数の姿勢セットのそれぞれについて作成するパス作成処理と、
前記複数のパスセットのそれぞれの評価に基づいて前記複数のパスセットの中から1つを選択する評価処理と、
を実行する。
【発明の効果】
【0008】
本発明の一側面によれば、ロボットが、複数のパスセットの中から選択された1つのパスセットを含む動作プログラムに従って制御されると、ロボットの関節が無駄な動きをしない。
【図面の簡単な説明】
【0009】
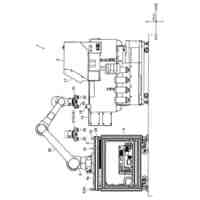
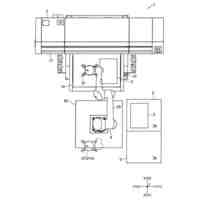
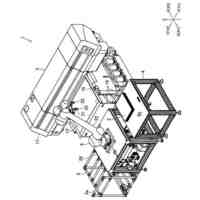
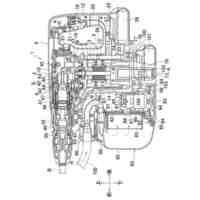
図1は、ロボット、ロボット制御装置及び教示支援装置を示した図である。
図2は、教示支援装置のブロック図である。
図3は、1番のノードのデータ構成の一例を示した図である。
図4は、ノード番号“1番”の複数の関節角セットのデータ構成の一例を示した図である。
図5は、最初のノードから最後のノードまでの関節角セットを示した図である。
図6は、選定されたノード番号“1番”の関節角セットと、選定されたノード番号“2番”の関節角セットの紐付けを示す図である。
図7は、最初のノード番号から最後のノード番号までの紐付けられた関節角セットの組み合わせを示した図である。
図8は、関節のパスの一例を示したチャートである。
図9は、評価順位と点数の関係を示すデータテーブルである。
図10は、評価順位と点数の関係を示すデータテーブルである。
図11は、評価順位と点数の関係を示すデータテーブルである。
図12は、評価順位と点数の関係を示すデータテーブルである。
【発明を実施するための形態】
【0010】
以下、図面を参照して、実施形態について説明する。実施形態の特徴及び技術的な効果は、以下の詳細な説明及び図面から理解される。ただし、本発明の範囲は、以下に開示された実施形態に限定されない。図面は例示のみのために提供されるため、本発明の範囲は図面の例示に限定されない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
8日前
株式会社マキタ
電動工具
16日前
株式会社マキタ
電動工具
1日前
川崎重工業株式会社
ロボットリスト
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットアーム
16日前
日本車輌製造株式会社
締め付け工具
16日前
川崎重工業株式会社
ロボットシステム
16日前
日本信号株式会社
作業機制御システム
1日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
ジヤトコ株式会社
圧入装置
29日前
株式会社京阪エンジニアリング
脱着装置
2日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社マキタ
集塵アタッチメント
1日前
株式会社スター精機
ワーク搬送装置
5日前
株式会社アマダ
磁気吸着装置
1か月前
モトコマ株式会社
寄せポンチホルダー
17日前
川崎重工業株式会社
ロボットシステム
8日前
トヨタ自動車株式会社
制御装置及び制御方法
16日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
個人
ターンバックル用工具
23日前
株式会社DailyColor
ロボットハンド
17日前
有限会社松尾エンジニアリング
連結部材
17日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
22日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社マキタ
電動工具
8日前
株式会社マキタ
作業機
29日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ