TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025020984
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124648
出願日
2023-07-31
発明の名称
搬送ロボットの制御方法
出願人
国立大学法人九州工業大学
,
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
9/10 20060101AFI20250205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ベルト駆動型の搬送ロボットにおいて、先端側のハンドの目標軌道の逸脱を抑制することが可能な制御方法を提供する。
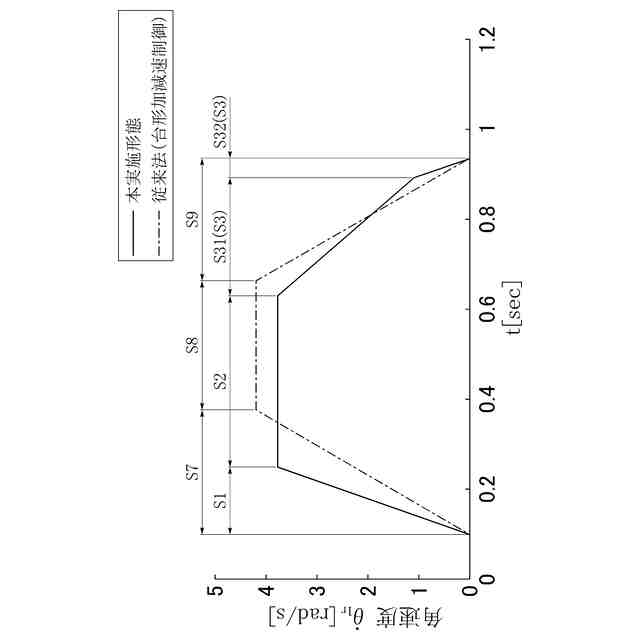
【解決手段】本発明の搬送ロボットの制御方法は、互いに回動可能に支持された第1アーム、第2アームおよびハンドを備え、当該ハンドが水平直線移動させられるベルト駆動型の搬送ロボットの制御方法であって、第1アームの角速度は、動作開始から加速する加速区間S1と、加速区間S1の後に続き、一定速度が継続する等速区間S2と、等速区間S2の後に続き、動作終了まで減速する減速区間S3と、を含んで構成され、加速区間S1および減速区間S3の少なくとも一方は、第1加速度で加速し、または第1減速度で減速する第1区間S31と、前記第1加速度と異なる第2加速度で加速し、または前記第1減速度と異なる第2減速度で減速する第2区間S32と、を有する。
【選択図】図5
特許請求の範囲
【請求項1】
一端側の第1垂直軸線の回りに回動可能な第1アームと、一端側が前記第1アームの他端側に対して第2垂直軸線の回りに回動可能に支持された第2アームと、一端側が前記第2アームの他端側に対して第3垂直軸線の回りに回動可能に支持されハンドと、を備え、
前記第1アームおよび前記第2アームの各々の内部に配置されたベルトの連係により、前記第1アームが前記第1垂直軸線の回りに回動させられると前記ハンドが水平直線移動させられるベルト駆動型の搬送ロボットの制御方法であって、
前記第1アームおよび前記第2アームを縮めた縮め姿勢と前記第1アームおよび前記第2アームを伸ばした伸ばし姿勢との間で前記ハンドを水平直線移動させる際の前記第1アームの前記垂直軸線回りの角速度は、動作開始から加速する加速区間と、前記加速区間の後に続き、一定速度が継続する等速区間と、前記等速区間の後に続き、動作終了まで減速する減速区間と、を含んで構成され、
前記加速区間および前記減速区間の少なくとも一方は、第1加速度で加速し、または第1減速度で減速する第1区間と、前記第1加速度と異なる第2加速度で加速し、または前記第1減速度と異なる第2減速度で減速する第2区間と、を有する、搬送ロボットの制御方法。
続きを表示(約 740 文字)
【請求項2】
前記第1区間は前記等速区間に連続し、且つ前記第2区間は前記第1区間に連続しており、
前記加速区間が前記第1区間および前記第2区間を有する場合、前記第1加速度が前記第2加速度よりも小であり、
前記減速区間が前記第1区間および前記第2区間を有する場合、前記第1減速度が前記第2減速度よりも小である、請求項1に記載の搬送ロボットの制御方法。
【請求項3】
前記第1アームおよび前記第2アームを前記縮め姿勢から前記伸ばし姿勢まで移動させる伸ばし動作において、前記減速区間が前記第1区間および前記第2区間を有し、
前記第1アームおよび前記第2アームを前記伸ばし姿勢から前記縮め姿勢まで移動させる縮め動作において、前記加速区間が前記第1区間および前記第2区間を有する、請求項2に記載の搬送ロボットの制御方法。
【請求項4】
前記等速区間における前記第1アームの角速度は、一定加速度区間、一定速度区間および一定減速度区間からなる台形加減速制御における前記一定速度区間の角速度よりも小である、請求項1ないし3のいずれかに記載の搬送ロボットの制御方法。
【請求項5】
前記加速区間から前記減速区間まで前記第1アームを回動させる動作時間は、前記台形加減速制御において前記一定加速度区間から前記一定減速度区間まで前記第1アームを回動させる動作時間と実質的に同一であり、
前記加速区間から前記減速区間までの前記第1アームの角度移動量は、前記台形加減速制御における前記一定加速度区間から前記一定減速度区間までの前記第1アームの角度移動量と実質的に同一である、請求項4に記載の搬送ロボットの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送ロボットの制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
半導体製造等の分野において、ウエハ等の薄板状のワークを搬送する際にワーク搬送用の搬送ロボットが用いられている。このような薄板状のワークを搬送するための搬送ロボットとしては、たとえばベルト駆動型の水平多関節ロボットが知られている(たとえば特許文献1を参照)。この搬送ロボットは、駆動軸を有する後段側アームと、当該後段側アームに回動可能に支持された前段側アームと、当該前段側アームに回動可能に支持されたハンドと、これら2つのアームおよびハンドを駆動させる駆動部と、を備える。この搬送ロボットにおいて、2つのアーム、およびハンドを回動させるための動力伝達機構としてベルトが用いられる。搬送ロボットは、2つのアームを縮めた姿勢と伸ばした姿勢との間で姿勢変更する際、ワークを把持するハンドが直線状の目標軌道を移動するように構成される。一方、半導体製造工程におけるウエハ等の搬送は高速化が求められており、アームの回動駆動は、たとえば台形加減速制御により行う。
【0003】
半導体製造工程では、ハンドに把持されたウエハ等のワークの移動経路にゲートバルブやカセットの入り口など狭い部分が存在するので、ワークを把持するハンドが目標軌道を精密に追従しなければならない。しかしながら、高速動作中のハンドは、本来通るべき目標軌道から逸脱することが知られている。当該ハンドの目標軌道からの逸脱の主な要因は、ベルトの伸縮であることが分かっているが、ベルトの伸縮量そのものを計測・制御することが難しいことから、上記の軌道逸脱を完全に無くすことは難しいとされている。アームおよびハンドを低速で動作させると、ベルトにかかる負荷を小さくすることができ、ハンドの軌道逸脱の低減を図ることができる。しかしながら、半導体製造現場においては、動作時間(タクトタイム)を延ばすことなく、目標軌道からの逸脱を低減することが求められている。
【先行技術文献】
【特許文献】
【0004】
特開2003-188231号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、このような事情のもとで考え出されたものであって、ベルト駆動型の搬送ロボットにおいて、先端側のハンドの目標軌道の逸脱を抑制することが可能な制御方法を提供することを主たる課題とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するため、本発明では、次の技術的手段を採用した。
【0007】
本発明によって提供される搬送ロボットの制御方法は、一端側の第1垂直軸線の回りに回動可能な第1アームと、一端側が前記第1アームの他端側に対して第2垂直軸線の回りに回動可能に支持された第2アームと、一端側が前記第2アームの他端側に対して第3垂直軸線の回りに回動可能に支持されハンドと、を備え、前記第1アームおよび前記第2アームの各々の内部に配置されたベルトの連係により、前記第1アームが前記第1垂直軸線の回りに回動させられると前記ハンドが水平直線移動させられるベルト駆動型の搬送ロボットの制御方法であって、前記第1アームおよび前記第2アームを縮めた縮め姿勢と前記第1アームおよび前記第2アームを伸ばした伸ばし姿勢との間で前記ハンドを水平直線移動させる際の前記第1アームの前記垂直軸線回りの角速度は、動作開始から加速する加速区間と、前記加速区間の後に続き、一定速度が継続する等速区間と、前記等速区間の後に続き、動作終了まで減速する減速区間と、を含んで構成され、前記加速区間および前記減速区間の少なくとも一方は、第1加速度で加速し、または第1減速度で減速する第1区間と、前記第1加速度と異なる第2加速度で加速し、または前記第1減速度と異なる第2減速度で減速する第2区間と、を有する。
【0008】
好ましい実施の形態においては、前記第1区間は前記等速区間に連続し、且つ前記第2区間は前記第1区間に連続しており、前記加速区間が前記第1区間および前記第2区間を有する場合、前記第1加速度が前記第2加速度よりも小であり、前記減速区間が前記第1区間および前記第2区間を有する場合、前記第1減速度が前記第2減速度よりも小である。
【0009】
好ましい実施の形態においては、前記第1アームおよび前記第2アームを前記縮め姿勢から前記伸ばし姿勢まで移動させる伸ばし動作において、前記減速区間が前記第1区間および前記第2区間を有し、前記第1アームおよび前記第2アームを前記伸ばし姿勢から前記縮め姿勢まで移動させる縮め動作において、前記加速区間が前記第1区間および前記第2区間を有する。
【0010】
好ましい実施の形態においては、前記等速区間における前記第1アームの角速度は、一定加速度区間、一定速度区間および一定減速度区間からなる台形加減速制御における前記一定速度区間の角速度よりも小である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
1日前
株式会社エビス
連結具
2か月前
株式会社マキタ
電動工具
9日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
川崎重工業株式会社
ロボットリスト
9日前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
1か月前
日本車輌製造株式会社
締め付け工具
9日前
川崎重工業株式会社
ロボットアーム
9日前
川崎重工業株式会社
ロボットアーム
9日前
川崎重工業株式会社
ロボットシステム
9日前
CKD株式会社
吸着型搬送装置
23日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
26日前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
26日前
株式会社安川電機
ロボット
26日前
ジヤトコ株式会社
圧入装置
22日前
株式会社アマダ
磁気吸着装置
29日前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
モトコマ株式会社
寄せポンチホルダー
10日前
工機ホールディングス株式会社
作業機
29日前
工機ホールディングス株式会社
作業機
29日前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
制御装置及び制御方法
9日前
川崎重工業株式会社
ロボットシステム
1日前
個人
ターンバックル用工具
16日前
株式会社DailyColor
ロボットハンド
10日前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
工機ホールディングス株式会社
電気機器
2か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
有限会社松尾エンジニアリング
連結部材
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ