TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018519
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122293
出願日
2023-07-27
発明の名称
ロボットシステムおよび位置検出方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250130BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ツールの位置を精度よく検出することのできるロボットシステムおよび位置検出方法を提供すること。
【解決手段】ロボットシステムは、ロボットアームと、前記ロボットアームに取り付けられているツールと、前記ツールとの相対的位置関係が一定となるように配置され、対象物に対する並進量を検出する複数の光学センサーと、複数の前記光学センサーが検出した前記並進量に基づいて前記ツールの並進量および回転量を検出し、前記ツールの並進量および回転量からを前記ツールの位置を検出する制御装置と、を有する。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットアームと、
前記ロボットアームに取り付けられているツールと、
前記ツールとの相対的位置関係が一定となるように配置され、対象物に対する並進量を検出する複数の光学センサーと、
複数の前記光学センサーが検出した前記並進量に基づいて前記ツールの並進量および回転量を検出し、前記ツールの並進量および回転量から前記ツールの位置を検出する制御装置と、を有することを特徴とするロボットシステム。
続きを表示(約 880 文字)
【請求項2】
前記光学センサーは、光学トラッキングセンサーであり、
光源と、
前記光源からの光を前記対象物に照射するレンズ部材と、
前記対象物で反射した前記光を受光する撮像素子と、を備え、
前記撮像素子によって撮像された複数の画像を比較して前記画像の移動量を算出することにより、前記対象物に対する並進量を検出する請求項1に記載のロボットシステム。
【請求項3】
前記光学センサーは、前記対象物に対して斜め方向から前記光を照射する請求項2に記載のロボットシステム。
【請求項4】
前記光学センサーは、互いに直交する2つの検出軸を有する請求項1に記載のロボットシステム。
【請求項5】
前記複数の光学センサーの間に、前記ツールが配置されている請求項1に記載のロボットシステム。
【請求項6】
前記ツールは、印刷ヘッドであり、
前記対象物に対する印刷作業を行う請求項1に記載のロボットシステム。
【請求項7】
前記制御装置は、前記印刷ヘッドの位置に基づいて前記印刷ヘッドの印刷軌道を補正する請求項6に記載のロボットシステム。
【請求項8】
前記対象物との接触を検出する力覚センサーを有する請求項1に記載のロボットシステム。
【請求項9】
前記対象物を搬送するコンベアを有し、
前記コンベアで搬送される前記対象物に対して前記ツールを用いて作業を行う請求項1に記載のロボットシステム。
【請求項10】
ロボットアームと、前記ロボットアームに取り付けられているツールと、前記ツールとの相対的位置関係が一定となるように配置され、対象物に対する並進量を検出する複数の光学センサーと、を有し、
複数の前記光学センサーが検出した前記並進量に基づいて前記ツールの並進量および回転量を検出し、前記ツールの並進量および回転量から前記ツールの位置を検出することを特徴とする位置検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムおよび位置検出方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1に記載された印刷システムは、先端に装着された印刷ヘッドを備えたロボットを動かして、対象物に向けてインクを吐出することにより、対象物への印刷を行う。また、印刷システムは、印刷ヘッドの実際の位置を検出するための回転角度センサーと、印刷ヘッドとの間に配置され印刷ヘッドの実際の位置に基づいて印刷ヘッドの位置を補正するピエゾアクチュエーターと、を有する。このように、印刷ヘッドの実際の位置に基づいて印刷ヘッドの位置を補正することにより、ストリップ(隙間)のない印刷を実現している。
【先行技術文献】
【特許文献】
【0003】
特開2013-202781号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の印刷システムでは、回転角度センサーの配置の都合上、印刷ヘッドの並進方向に対する姿勢変化の検出が困難である。そのため、印刷ヘッドの実際の位置の検出精度が低く、高精度な印刷作業を行うことができないという問題がある。
【課題を解決するための手段】
【0005】
本発明のロボットシステムは、ロボットアームと、
前記ロボットアームに取り付けられているツールと、
前記ツールとの相対的位置関係が一定となるように配置され、対象物に対する並進量を検出する複数の光学センサーと、
複数の前記光学センサーが検出した前記並進量に基づいて前記ツールの並進量および回転量を検出し、前記ツールの並進量および回転量から前記ツールの位置を検出する制御装置と、を有する。
【0006】
本発明の位置検出方法は、ロボットアームと、前記ロボットアームに取り付けられているツールと、前記ツールとの相対的位置関係が一定となるように配置され、対象物に対する並進量を検出する複数の光学センサーと、を有し、
複数の前記光学センサーが検出した前記並進量に基づいて前記ツールの並進量および回転量を検出し、前記ツールの並進量および回転量から前記ツールの位置を検出する。
【図面の簡単な説明】
【0007】
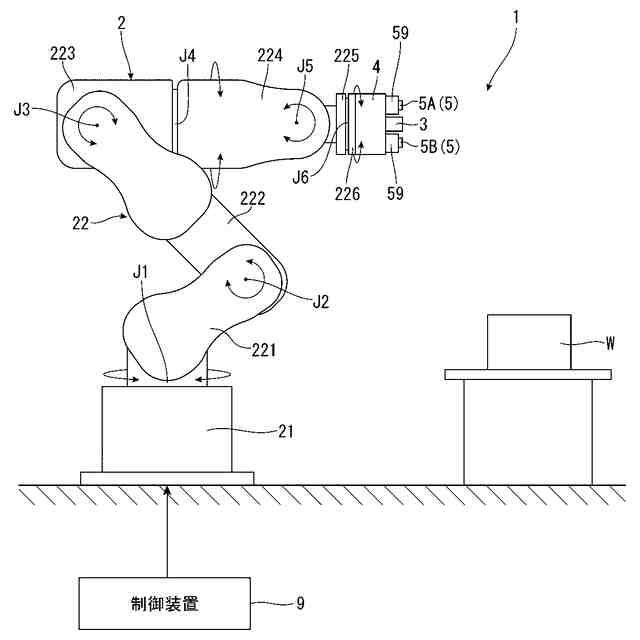
第1実施形態に係るロボットシステムの全体図である。
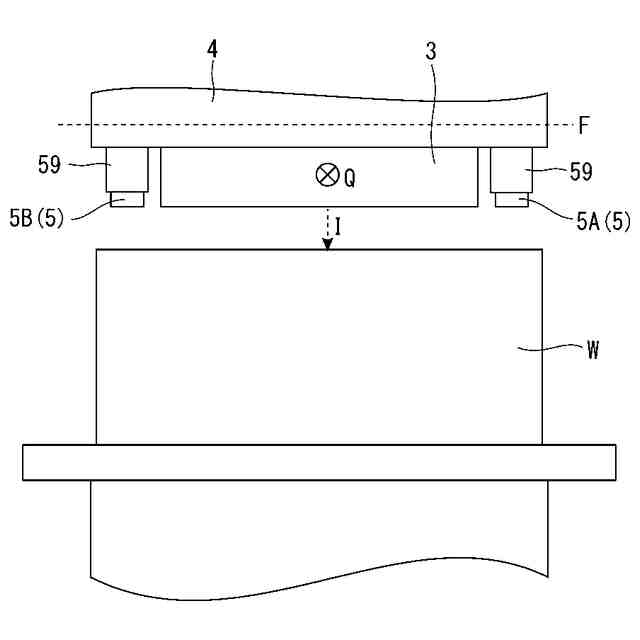
印刷作業の様子を示す模式図である。
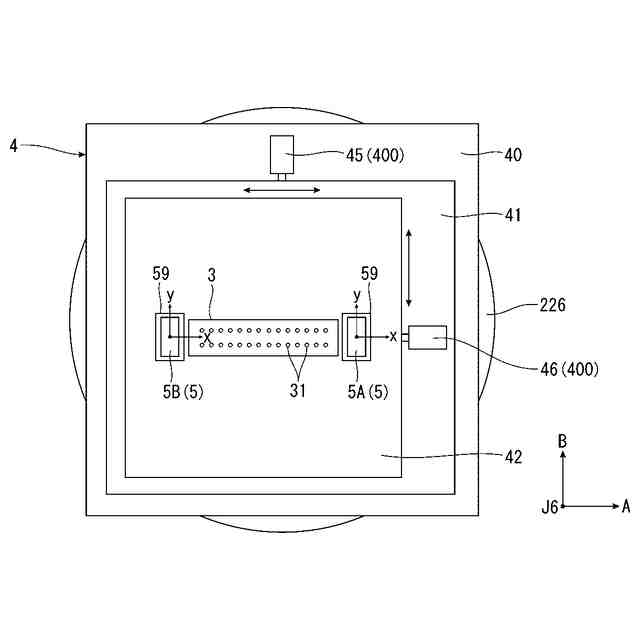
移動ステージを示す平面図である。
光学センサーの断面図である。
光学センサーの検出原理を示す模式図である。
光学センサーの問題点を説明するための模式図である。
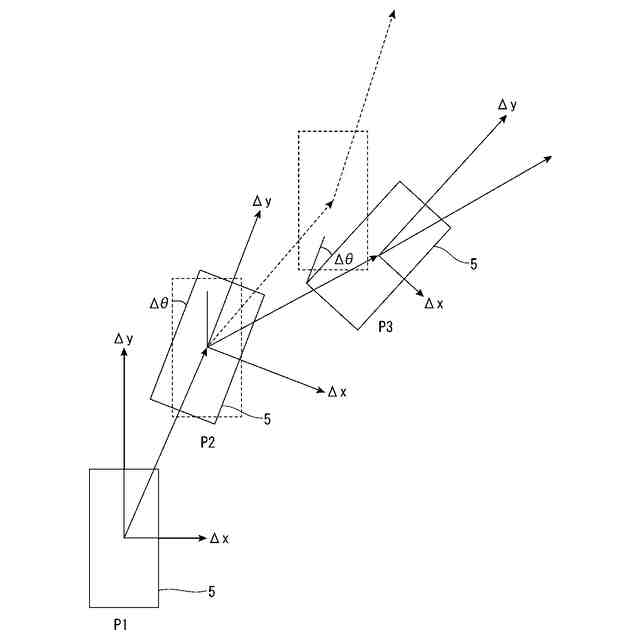
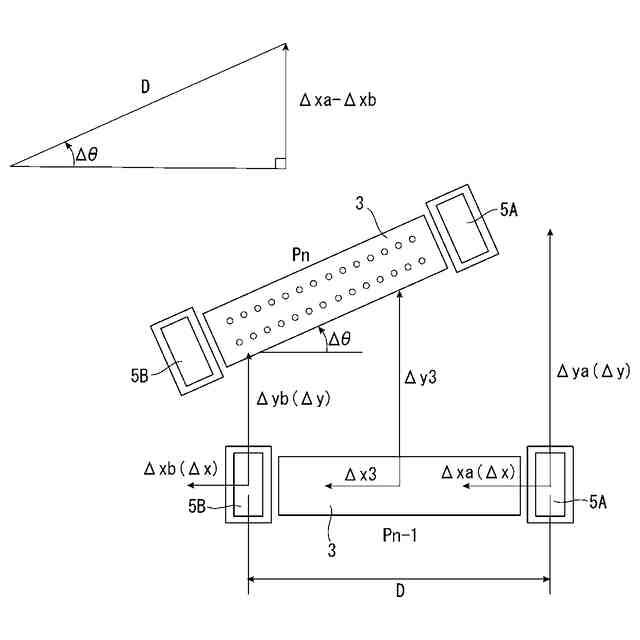
並進量および回転量を検出する方法を説明するための模式図である。
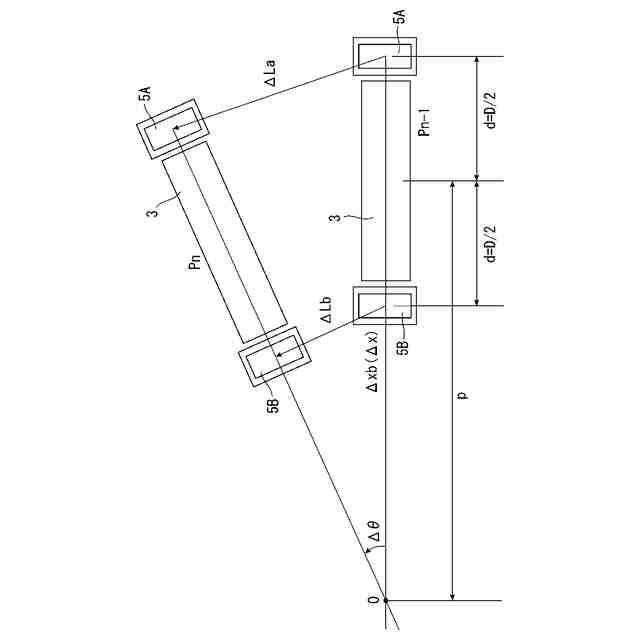
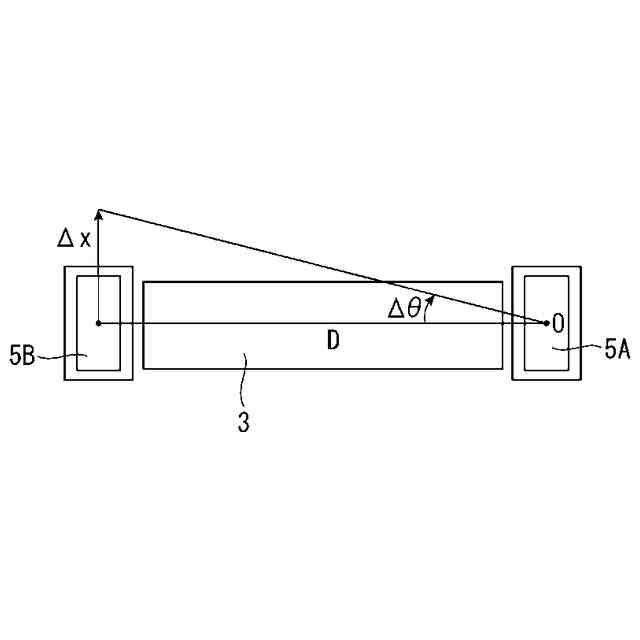
回転量を検出する方法を説明するための模式図である。
回転量を検出する方法を説明するための模式図である。
光学センサーの配置の変形例を示す平面図である。
光学センサーの配置の変形例を示す平面図である。
光学センサーの配置の変形例を示す平面図である。
光学センサーの配置の変形例を示す平面図である。
光学センサーの配置の変形例を示す平面図である。
光学センサーの配置の変形例を示す平面図である。
光学センサーの配置の変形例を示す平面図である。
第2実施形態に係るロボットシステムの全体図である。
印刷作業の様子を示す模式図である。
印刷作業の様子を示す模式図である。
印刷作業の様子を示す模式図である。
第3実施形態に係るロボットシステムの全体図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットシステムおよび位置検出方法を添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
図1は、第1実施形態に係るロボットシステムの全体図である。図2は、印刷作業の様子を示す模式図である。図3は、移動ステージを示す平面図である。図4は、光学センサーの断面図である。図5は、光学センサーの検出原理を示す模式図である。図6は、光学センサーの問題点を説明するための模式図である。図7は、並進量および回転量を検出する方法を説明するための模式図である。図8および図9は、それぞれ、回転量を検出する方法を説明するための模式図である。図10ないし図16は、それぞれ、光学センサーの配置の変形例を示す平面図である。
【0010】
図1に示すロボットシステム1は、対象物Wへの印刷作業を行う印刷システムに適用されている。ロボットシステム1は、ロボット2と、ロボット2の先端に装着されたツールとしての印刷ヘッド3と、ロボット2と印刷ヘッド3との間に配置された移動ステージ4と、印刷ヘッド3に配置された複数の光学センサー5と、ロボット2の駆動を制御する制御装置9と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ