TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025576
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023130449
出願日
2023-08-09
発明の名称
基板搬送ロボット、および、基板搬送ロボットの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250214BHJP(基本的電気素子)
要約
【課題】基板の搬送動作を適切に行うことが可能な基板搬送ロボットおよび基板搬送ロボットの制御方法を提供する。
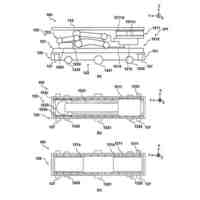
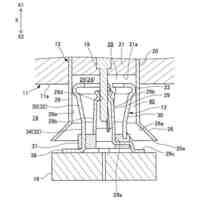
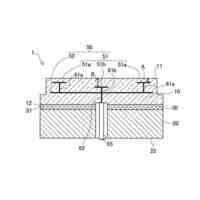
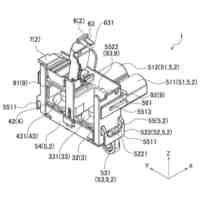
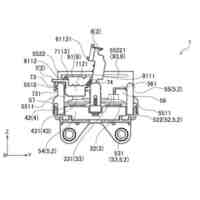
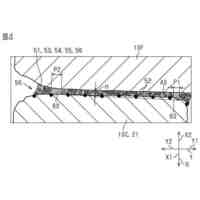
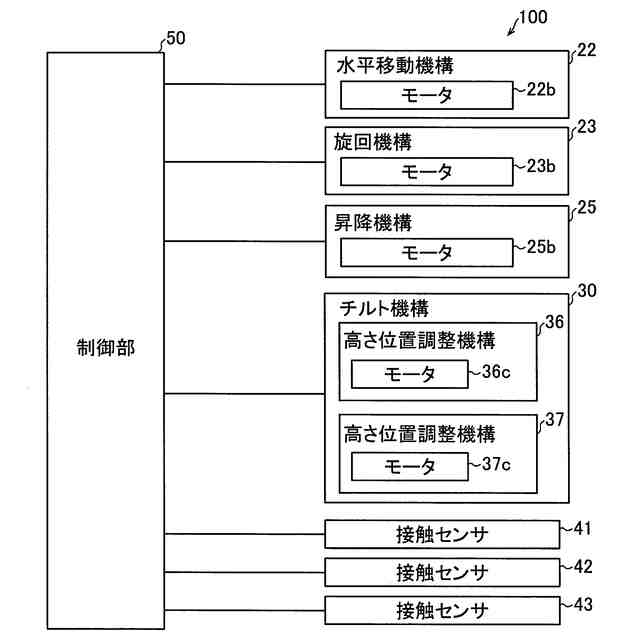
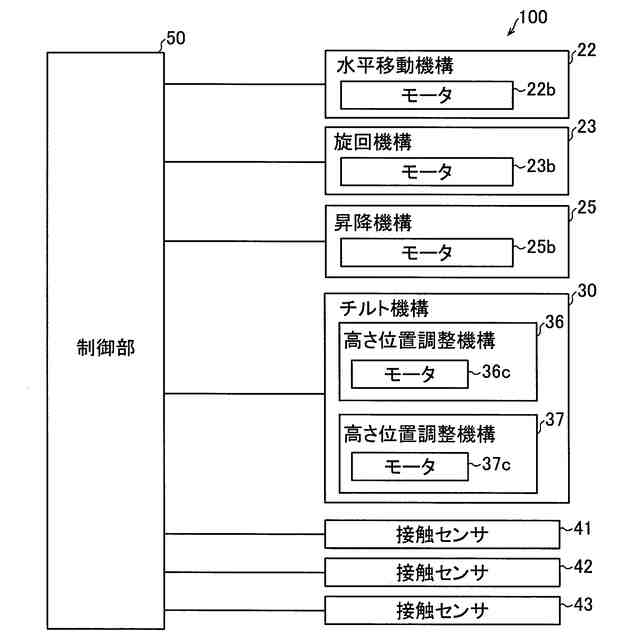
【解決手段】この基板搬送ロボット100は、基板または検出治具の基板載置部に対する搬送動作において、基板または検出治具と、基板保持ハンドとの接触状態を検出する接触センサ41、42、および、43と、基板保持ハンドの傾きを調整するチルト機構30と、接触センサ41、42、および、43からの検出信号に基づいて、チルト機構30を動作させることにより基板載置部と基板保持ハンドとの相対的な傾きを調整する制御部50と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
基板、または、前記基板を模した検出治具を保持する基板保持ハンドと、
前記基板または前記検出治具の基板載置部に対する搬送動作において、前記基板または前記検出治具と、前記基板保持ハンドとの接触状態を検出する接触センサと、
前記基板保持ハンドの傾きを調整する傾き調整機構と、
前記接触センサからの検出信号に基づいて、前記傾き調整機構を動作させることにより前記基板載置部と前記基板保持ハンドとの相対的な傾きを調整する制御部と、を備える、基板搬送ロボット。
続きを表示(約 1,600 文字)
【請求項2】
前記接触センサは、複数配置されており、
前記制御部は、複数の前記接触センサの各々における検出信号の変化の差異に基づいて、前記基板載置部と前記基板保持ハンドとの相対的な傾きを調整する、請求項1に記載の基板搬送ロボット。
【請求項3】
前記接触センサは、前記基板保持ハンドに配置され、前記基板と前記基板保持ハンドとの接触状態を検出するハンドセンサと、前記検出治具に配置され、前記検出治具と前記基板保持ハンドとの接触状態を検出する治具センサと、前記基板載置部に配置され、前記基板載置部と前記基板または前記検出治具との接触状態を検出することによって前記基板または前記検出治具と前記基板保持ハンドとの接触状態を検出する載置部センサとの少なくとも1つを含む、請求項1または2に記載の基板搬送ロボット。
【請求項4】
前記接触センサは、少なくとも3つの前記ハンドセンサを含み、
前記ハンドセンサは、前記基板保持ハンドにおいて、前記基板が当接する位置のうちの互いに異なる少なくとも3つの位置に配置されている、請求項3に記載の基板搬送ロボット。
【請求項5】
前記基板保持ハンドは、先端部が2つに分かれた二股形状を有しており、
前記ハンドセンサは、前記基板保持ハンドにおいて、2つに分かれた前記先端部の各々に1つずつ配置されている先端部センサと、基端部に配置されている基端部センサとを含む、請求項4に記載の基板搬送ロボット。
【請求項6】
前記接触センサは、少なくとも3つの前記治具センサを含み、
前記治具センサは、前記検出治具において、前記基板保持ハンドが当接する位置と、前記基板載置部が当接する位置とのうちの互いに異なる少なくとも3つの位置に配置されている、請求項3に記載の基板搬送ロボット。
【請求項7】
前記基板および前記検出治具は、円板状形状を有し、
前記接触センサは、
少なくとも3つ配置されており、
円板状形状を有する前記基板または前記検出治具の周縁部に対して、円周を3分割する位置に対応して1つずつ配置されている、請求項1または2に記載の基板搬送ロボット。
【請求項8】
前記制御部は、前記接触センサからの検出信号に基づいて、上下方向に沿った1軸の検出値を取得することによって、前記基板載置部と前記基板保持ハンドとの相対的な傾きを調整する、請求項2に記載の基板搬送ロボット。
【請求項9】
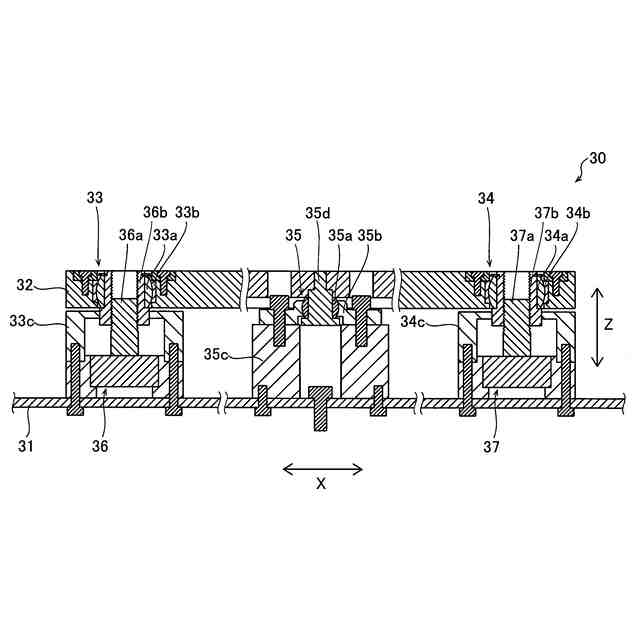
前記傾き調整機構は、
下側部材と、
前記下側部材と上下方向に対向して配置された上側部材と、
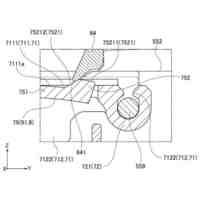
前記下側部材と前記上側部材との間において、上下方向から見て互いに異なる箇所に配置される3つの球面滑り軸受けと、
3つの前記球面滑り軸受けのうちの2つにそれぞれ対応して設けられる2つの高さ位置調整機構と、を含み、
前記制御部は、前記接触センサからの検出信号に基づいて、前記高さ位置調整機構により前記下側部材に対する前記上側部材の傾きを調整することによって前記基板載置部と前記基板保持ハンドとの相対的な傾きを調整する、請求項1または2に記載の基板搬送ロボット。
【請求項10】
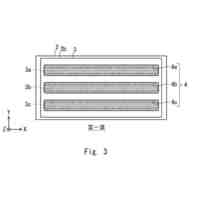
前記基板保持ハンドは、各々が前記基板または前記検出治具を保持する複数のブレード部材を含み、
前記複数のブレード部材が接続されるブレード保持部をさらに備え、
前記制御部は、前記接触センサからの検出信号に基づいて、前記傾き調整機構を動作させることにより前記ブレード保持部の傾きを調整することによって、前記基板載置部と前記基板保持ハンドとの相対的な傾きを調整する、請求項1または2に記載の基板搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送ロボット、および、基板搬送ロボットの制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、基板搬送用ロボットが知られている。たとえば、特許文献1では、基板保持部とロボットアームとを備える基板搬送用ロボットが記載されている。基板保持部は、基板を保持する。ロボットアームは、基板保持部を支持するとともに、基板保持部を水平面内で移動させる。また、特許文献1に記載の基板搬送用ロボットは、基板保持状態を検知する接触センサを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2003-170382号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1の基板搬送用ロボットのように基板を搬送する場合において、基板を保持する基板保持ハンドである基板保持部と、基板が載置される基板載置部との間の傾きにずれが生じる場合がある。その場合には、基板保持ハンドと基板載置部との間の傾きのずれに起因して、基板の搬送動作が適切に行われず、基板に対して不要な力または振動が加えられる場合がある。基板の搬送動作において、基板に対して力または振動などが加えられた場合には基板の表面に異物が付着することがある。このような異物は、基板に形成される回路に異常が生じることの原因となる。また、基板の搬送動作が適切に行われない場合には、搬送された基板に位置ずれが生じる場合がある。そのため、基板の搬送動作を適切に行うことが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板の搬送動作を適切に行うことが可能な基板搬送ロボット、および、基板搬送ロボットの制御方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による基板搬送ロボットは、基板、または、基板を模した検出治具を保持する基板保持ハンドと、基板または検出治具の基板載置部に対する搬送動作において、基板または検出治具と、基板保持ハンドとの接触状態を検出する接触センサと、基板保持ハンドの傾きを調整する傾き調整機構と、接触センサからの検出信号に基づいて、傾き調整機構を動作させることにより基板載置部と基板保持ハンドとの相対的な傾きを調整する制御部と、を備える。
【0007】
この開示の第1の局面による基板搬送ロボットは、上記のように、接触センサからの検出信号に基づいて、傾き調整機構を動作させることにより基板載置部と基板保持ハンドとの相対的な傾きを調整する制御部を備える。これにより、接触センサからの検出信号に基づいて傾き調整機構を動作させることによって、基板保持ハンドと基板載置部との間の傾きのずれを抑制できる。そのため、基板保持ハンドと基板載置部との間の傾きのずれに起因して基板の搬送動作が不適切となることを抑制できる。その結果、基板の搬送動作を適切に行うことができる。
【0008】
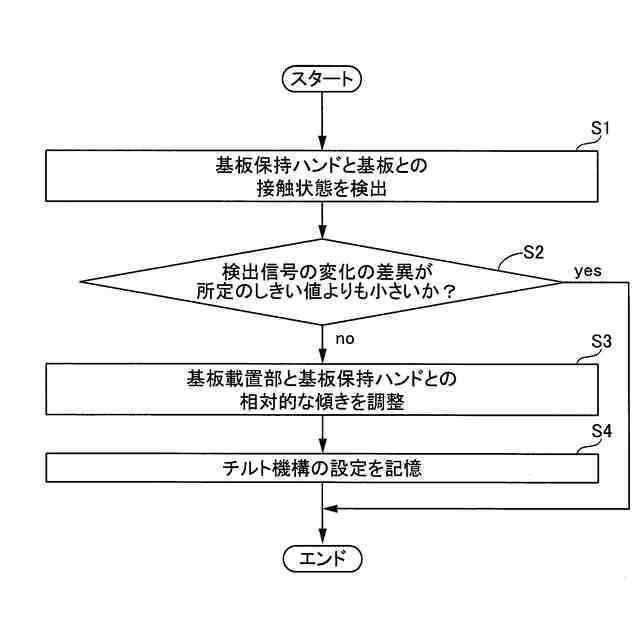
この開示の第2の局面による基板搬送ロボットの制御方法は、基板、または、基板を模した検出治具の基板載置部に対する搬送動作において、基板または検出治具を保持する基板保持ハンドと、基板または検出治具との接触状態を検出し、基板保持ハンドと基板または検出治具との接触状態を検出した検出信号に基づいて、基板保持ハンドの傾きを調整する傾き調整機構を動作させることにより基板載置部と基板保持ハンドとの相対的な傾きを調整する。
【0009】
この開示の第2の局面による基板搬送ロボットの制御方法は、上記のように、基板保持ハンドと基板または検出治具との接触状態を検出した検出信号に基づいて、基板保持ハンドの傾きを調整する傾き調整機構を動作させることにより基板載置部と基板保持ハンドとの相対的な傾きを調整する。これにより、接触状態を検出した検出信号に基づいて傾き調整機構を動作させることによって、基板保持ハンドと基板載置部との間の傾きのずれを抑制できる。そのため、基板保持ハンドと基板載置部との間の傾きのずれに起因して基板の搬送動作が不適切となることを抑制できる。その結果、基板の搬送動作を適切に行うことが可能な基板搬送ロボットの制御方法を提供できる。
【発明の効果】
【0010】
本開示によれば、基板の搬送動作を適切に行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
液圧駆動システム、及びマルチコントロール弁
2日前
川崎重工業株式会社
基板搬送ロボット、および、基板搬送ロボットの制御方法
2日前
株式会社ビードットメディカル
患者搬送台車及び放射線照射システム
2日前
個人
トイレ用照明スイッチ
3日前
CKD株式会社
巻回装置
2日前
CKD株式会社
巻回装置
2日前
イリソ電子工業株式会社
電子部品
6日前
オムロン株式会社
電磁継電器
10日前
オムロン株式会社
電磁継電器
10日前
太陽誘電株式会社
コイル部品
10日前
オムロン株式会社
電磁継電器
10日前
太陽誘電株式会社
コイル部品
10日前
日本特殊陶業株式会社
保持部材
2日前
株式会社半導体エネルギー研究所
電池
23日前
国立大学法人信州大学
トランス
10日前
日新電機株式会社
変圧器
18日前
株式会社ヨコオ
ソケット
17日前
ローム株式会社
半導体装置
3日前
日本航空電子工業株式会社
コネクタ
3日前
トヨタバッテリー株式会社
二次電池
2日前
トヨタバッテリー株式会社
二次電池
17日前
三洋化成工業株式会社
リチウムイオン電池
24日前
日新イオン機器株式会社
気化器、イオン源
3日前
矢崎総業株式会社
端子台
2日前
株式会社ダイヘン
リユース方法
2日前
矢崎総業株式会社
端子台
2日前
矢崎総業株式会社
端子台
2日前
矢崎総業株式会社
端子台
2日前
矢崎総業株式会社
端子台
2日前
河村電器産業株式会社
接続装置
18日前
河村電器産業株式会社
接続装置
18日前
株式会社村田製作所
電池パック
24日前
株式会社村田製作所
コイル部品
2日前
トヨタ自動車株式会社
電池モジュール
2日前
住友電気工業株式会社
耐熱電線
10日前
株式会社村田製作所
コイル部品
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ