TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025023008
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2024205892,2019225670
出願日
2024-11-27,2019-12-13
発明の名称
ロボットシステム及びロボットの制御方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B25J
3/00 20060101AFI20250206BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】液状物の表面上の浮遊物を効果的に除去するロボットシステムを提供する。
【解決手段】ロボットシステムは、ロボットアームとエンドエフェクタとを有し且つ収容体に隣り合って配置されたロボットと、前記収容体から離れて配置され、前記ロボットへの遠隔操作の入力を受け付け且つ前記遠隔操作に対応して前記ロボットを動作させるための指令を出力する操作装置と、前記収容体の液状物の表面を撮像する撮像装置と、前記撮像装置によって撮像された画像を表示する提示装置と、制御装置とを備え、前記エンドエフェクタは、前記液状物の表面上の浮遊物を移動させることができる構成を有し、前記制御装置は、前記指令に従って、前記収容体から外部へ前記浮遊物を移動させるように、前記ロボットアームに前記エンドエフェクタを移動させることができるように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームと前記ロボットアームの先端のエンドエフェクタとを有し且つ液状物を収容する収容体に隣り合って配置されたロボットと、
前記収容体から離れて配置され、前記ロボットへの遠隔操作の入力を受け付け且つ前記遠隔操作に対応して前記ロボットを動作させるための指令を出力する操作入力装置と、
前記液状物の表面を撮像する撮像装置と、
前記撮像装置によって撮像された画像を表示する提示装置と、
前記ロボットの動作を制御する制御装置とを備え、
前記エンドエフェクタは、前記液状物の表面上の浮遊物を移動させることができる構成を有し、
前記制御装置は、前記操作入力装置から出力される前記指令に従って、前記収容体から外部へ前記浮遊物を移動させるように、前記ロボットアームに前記エンドエフェクタを移動させることができるように構成される
ロボットシステム。
続きを表示(約 1,800 文字)
【請求項2】
前記撮像装置によって撮像された画像を処理する画像処理装置をさらに備え、
前記画像処理装置は、前記液状物と前記浮遊物とを差異付ける画像処理を行うように構成され、
前記提示装置は、前記撮像装置によって処理された画像を表示する
請求項1に記載のロボットシステム。
【請求項3】
前記画像処理装置は、画像に含まれる画素の輝度値に基づき、前記液状物と前記浮遊物とを差異付ける画像処理を行う
請求項2に記載のロボットシステム。
【請求項4】
前記液状物の表面の温度を検出するセンサをさらに備え、
前記画像処理装置は、前記センサによって検出される前記液状物の表面の温度分布に基づき、前記液状物と前記浮遊物とを差異付ける画像処理を行う
請求項2または3に記載のロボットシステム。
【請求項5】
前記指令は、前記ロボットの手動運転のために前記操作入力装置に入力されるユーザの操作に対応して前記ロボットを動作させるための手動指令を含み、
前記制御装置は、前記収容体から外部へ前記浮遊物を移動させる前記ロボットの一連の動作の少なくとも一部の動作を、前記手動指令に従って前記ロボットに実行させる
請求項1~4のいずれか一項に記載のロボットシステム。
【請求項6】
前記指令は、前記ロボットの自動運転のための前記操作入力装置への入力に対応して前記ロボットを動作させるための自動指令を含み、
前記制御装置は、前記収容体から外部へ前記浮遊物を移動させる前記ロボットの一連の動作の少なくとも一部の動作を、前記自動指令に従って前記ロボットに実行させる
請求項1~5のいずれか一項に記載のロボットシステム。
【請求項7】
前記エンドエフェクタに作用する力を検出する力検出器をさらに備え、
前記操作入力装置は、前記ロボットを手動運転で操作するためにユーザの手から力を受ける操作部と、前記操作部に力を付与する力付与装置とを有し、
前記制御装置は、前記力検出器から検出結果を受け取り、前記力検出器によって検出された力に対応する付与力を前記操作部に付与する指令を前記操作入力装置に出力する
請求項1~6のいずれか一項に記載のロボットシステム。
【請求項8】
前記操作入力装置は、前記ロボットを手動運転で操作するために人の手で握ることができるグリップを有する操作部と、前記操作部を移動可能に支持し且つ屈曲及び旋回可能な操作アームとを備え、
前記操作部は、前記操作アームに対して前記グリップが球状面に沿って移動し且つ姿勢を変えるように3軸周りに回動可能に前記グリップを支持し、
前記操作入力装置は、前記グリップの前記3軸周りの回転量と、前記操作アームの屈折量及び旋回量とに対応する情報を、前記エンドエフェクタの位置及び姿勢を指令する前記指令として出力する
請求項1~7のいずれか一項に記載のロボットシステム。
【請求項9】
複数の前記収容体と、
前記複数の収容体のそれぞれに隣り合って配置された複数の前記ロボットと、
前記複数のロボットのうちから前記操作入力装置と接続される前記ロボットを指定する入力を受け付け、且つ指定された前記ロボットである指定ロボットの情報を出力する指定装置とをさらに備え、
前記制御装置は、
前記複数のロボットの動作を制御するように構成され、
前記指定装置から出力される前記指定ロボットの情報に基づき、前記操作入力装置から出力される前記指令に従って、前記指定ロボットを動作させる
請求項1~8のいずれか一項に記載のロボットシステム。
【請求項10】
前記複数の収容体のそれぞれの前記液状物の表面を撮像する複数の前記撮像装置をさらに備え、
前記制御装置は、
前記複数の撮像装置の動作を制御するように構成され、
前記指定ロボットの情報に基づき、前記指定ロボットに隣り合う前記収容体を撮像可能な前記撮像装置に、前記収容体の前記液状物の表面を撮像させる
請求項9に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来から、人が行っていた作業を補助又は代替するロボットが用いられている。特に、過酷な作業環境下でのロボットによる作業の補助及び代替は有用である。例えば、特許文献1は、高温な溶融金属めっき浴の表面上に浮遊するドロスと呼ばれる不純物を除去する除去装置を開示している。この除去装置はロボットを備え、当該ロボットは、ドロスの捕集、めっき浴からの引き上げ及び回収箱への投入を所定のプログラムで自動で行う。
【先行技術文献】
【特許文献】
【0003】
特開平5-302157号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、ロボットは、プログラムに従って、ドロス除去に関連する各動作を所定の順序及び時間で行う。しかしながら、めっき浴の表面上のドロスの分布は、一様でも一定でもなく、例えば、めっきの対象物によっても異なる。このため、自動で同じ動作を繰り返す特許文献1のロボットでは、効率的なドロスの除去が困難である。
【0005】
本開示は、液状物の表面上の浮遊物を効果的に除去するロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示の一態様に係るロボットシステムは、ロボットアームと前記ロボットアームの先端のエンドエフェクタとを有し且つ液状物を収容する収容体に隣り合って配置されたロボットと、前記収容体から離れて配置され、前記ロボットへの遠隔操作の入力を受け付け且つ前記遠隔操作に対応して前記ロボットを動作させるための指令を出力する操作入力装置と、前記液状物の表面を撮像する撮像装置と、前記撮像装置によって撮像された画像を表示する提示装置と、前記ロボットの動作を制御する制御装置とを備え、前記エンドエフェクタは、前記液状物の表面上の浮遊物を移動させることができる構成を有し、前記制御装置は、前記操作入力装置から出力される前記指令に従って、前記収容体から外部へ前記浮遊物を移動させるように、前記ロボットアームに前記エンドエフェクタを移動させることができるように構成される。
【0007】
本開示によれば、液状物の表面上の浮遊物を効果的に除去することが可能になる。
【図面の簡単な説明】
【0008】
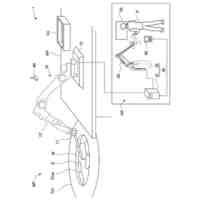
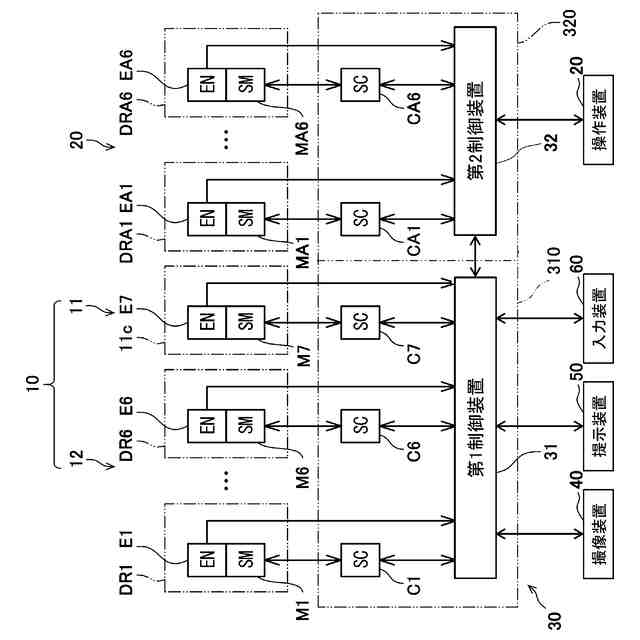
実施の形態に係るロボットシステムの構成の一例を示す図
実施の形態に係るロボットの構成の一例を示す側面図
実施の形態に係る操作装置の構成の一例を示す斜視図
図3の操作部を拡大して示す斜視図
実施の形態に係る制御装置及びその周辺の構成の一例を示すブロック図
実施の形態に係る制御装置の機能的構成の一例を示すブロック図
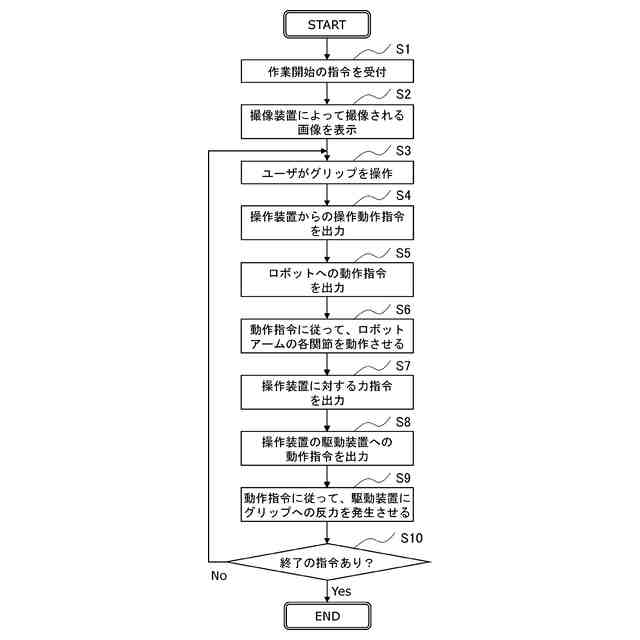
実施の形態に係るロボットシステムの手動運転での動作の一例を示すフローチャート
変形例に係るロボットシステム1Aの構成の一例を示す図
【発明を実施するための形態】
【0009】
まず、本開示の各態様例を説明する。本開示の一態様に係るロボットシステムは、ロボットアームと前記ロボットアームの先端のエンドエフェクタとを有し且つ液状物を収容する収容体に隣り合って配置されたロボットと、前記収容体から離れて配置され、前記ロボットへの遠隔操作の入力を受け付け且つ前記遠隔操作に対応して前記ロボットを動作させるための指令を出力する操作入力装置と、前記液状物の表面を撮像する撮像装置と、前記撮像装置によって撮像された画像を表示する提示装置と、前記ロボットの動作を制御する制御装置とを備え、前記エンドエフェクタは、前記液状物の表面上の浮遊物を移動させることができる構成を有し、前記制御装置は、前記操作入力装置から出力される前記指令に従って、前記収容体から外部へ前記浮遊物を移動させるように、前記ロボットアームに前記エンドエフェクタを移動させることができるように構成される。
【0010】
上記態様によると、ユーザは、ロボットから離れた遠隔位置において、提示装置に写し出される画像を視ることで、液状物の表面上の浮遊物の位置及び状態を認識し、この認識結果に応じた適切な指令を操作入力装置に入力し、ロボットに当該浮遊物を収容体から外部に移動させることができる。例えば、浮遊物が、製鉄工程、製鋼工程又は鋳造工程で溶湯に生じるスラグ等の不純物である場合、溶湯は溶融金属めっき浴よりもはるかに高温であるため、捕集網等を用いたスラグの捕集は困難である。例えば、スラグ等の不純物は、棒状物を用いて絡めとられるように捕集される。ユーザの判断に基づき不純物の状態に対応して動作制御されるロボットは、様々な不純物の効果的な捕集が可能である。よって、液状物の表面上の浮遊物を効果的に除去することが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
液化ガス運搬船
2日前
川崎重工業株式会社
ロボットシステム
5日前
川崎重工業株式会社
マルチコントロールバルブ
6日前
川崎重工業株式会社
計測装置、推定装置、及び計測方法
5日前
川崎重工業株式会社
液化ガス貯蔵タンクの運用方法及び液化ガス貯蔵タンク
5日前
川崎重工業株式会社
ロボットシステム及びロボットの制御方法
5日前
川崎重工業株式会社
仲介装置、それを用いた仲介方法及びプログラム
今日
個人
腰袋
5日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
13日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
日本車輌製造株式会社
締め付け工具
13日前
川崎重工業株式会社
ロボットアーム
13日前
川崎重工業株式会社
ロボットアーム
13日前
川崎重工業株式会社
ロボットリスト
13日前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
2か月前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
ロボットシステム
13日前
CKD株式会社
吸着型搬送装置
27日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社アイエイアイ
グリッパー
2か月前
ジヤトコ株式会社
圧入装置
26日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社スター精機
ワーク搬送装置
2日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ