TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032430
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023137688
出願日
2023-08-28
発明の名称
位置推定装置、位置推定方法及び位置推定プログラム
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
G01S
5/02 20100101AFI20250305BHJP(測定;試験)
要約
【課題】簡易な構成にて、測位データに基づいて推定される測位対象の位置推定精度を向上させる。
【解決手段】位置推定装置は、複数の代表点のそれぞれに測位対象が存在する存在確率を取得することと、前記測位対象が前記複数の代表点のそれぞれに移動する確率を示す遷移確率を取得することと、前記存在確率及び前記遷移確率に基づいて、前記測位対象の次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する存在確率を測位前存在確率として取得することと、前記次の測位データを取得することと、前記次の測位データに基づいて、前記次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する前記存在確率を更新することにより、測位後存在確率を取得することと、を行うように構成されている。
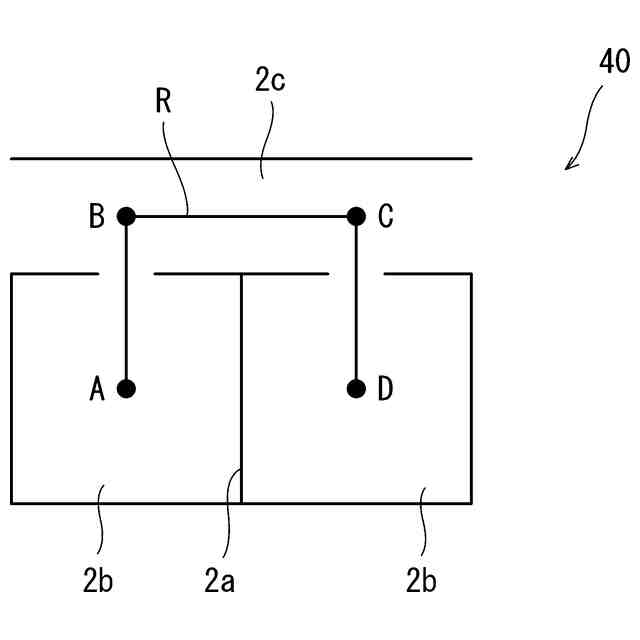
【選択図】図4
特許請求の範囲
【請求項1】
所定エリアにおいて測位対象が移動可能な空間に離散的に分布する複数の代表点の座標を離散化マップとして予め記憶したメモリと、
前記離散化マップに基づいて演算処理を行う処理回路と、を備え、
前記処理回路は、
前記複数の代表点のそれぞれに前記測位対象が存在する存在確率を取得することと、
前記測位対象が前記複数の代表点のそれぞれに移動する確率を示す遷移確率を取得することと、
前記存在確率及び前記遷移確率に基づいて、前記測位対象の次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する存在確率を測位前存在確率として取得することと、
前記次の測位データを取得することと、
前記次の測位データに基づいて、前記次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する前記測位前存在確率を更新することにより、測位後存在確率を取得することと、
を行うように構成されている、位置推定装置。
続きを表示(約 1,200 文字)
【請求項2】
前記処理回路は、前記測位後存在確率のうち最も高い存在確率に対応する前記代表点を、前記次の測位データの測位時での前記測位対象が存在する位置として決定するように構成されている、請求項1に記載の位置推定装置。
【請求項3】
前記遷移確率は、前記複数の代表点を結ぶ想定移動経路に基づいて設定される、請求項1又は2に記載の位置推定装置。
【請求項4】
前記複数の代表点は、特定代表点と、前記特定代表点とは異なる第1代表点と、前記特定代表点とは異なる第2代表点と、を含み、
前記特定代表点から前記第1代表点までの直線距離は、前記特定代表点から前記第2代表点までの直線距離よりも長く、
前記想定移動経路上での前記特定代表点から前記第1代表点までの距離は、前記想定移動経路上での前記特定代表点から前記第2代表点までの距離よりも短く、
前記遷移確率は、前記次の測位データの測位時に前記特定代表点から前記第1代表点に前記測位対象が移動する確率が、前記次の測位データの測位時に前記特定代表点から前記第2代表点に前記測位対象が移動する確率よりも高くなるように設定される、請求項3に記載の位置推定装置。
【請求項5】
前記遷移確率は、前記測位対象の想定移動速度及び前記測位データのサンプリング周波数に基づいて設定される、請求項1又は2に記載の位置推定装置。
【請求項6】
前記離散化マップは、前記複数の代表点の場所の属性を示す属性情報を有し、
前記遷移確率は、前記属性情報に基づいて設定される、請求項1又は2に記載の位置推定装置。
【請求項7】
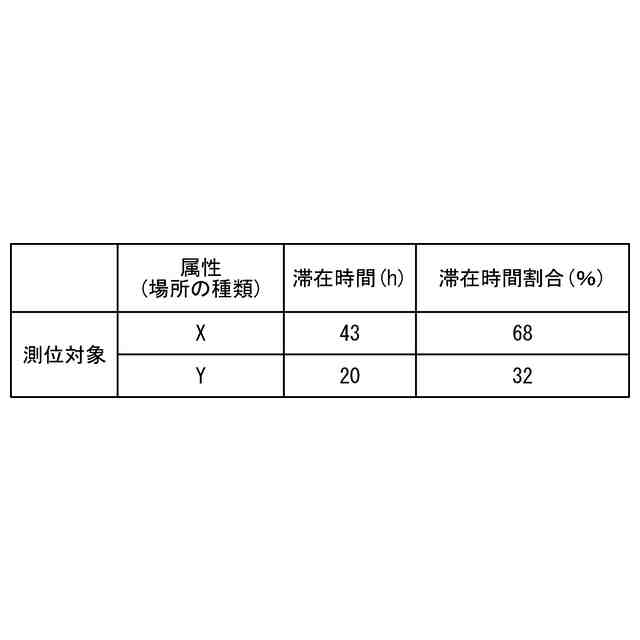
前記離散化マップは、前記複数の代表点の場所の属性を示す属性情報を有し、
前記処理回路は、前記測位後存在確率に基づいて、前記場所の属性ごとの前記測位対象の滞在時間又は滞在時間割合を算出するように構成されている、請求項1又は2に記載の位置推定装置。
【請求項8】
所定エリアにおいて測位対象が移動可能な空間に離散的に分布する複数の代表点のそれぞれに前記測位対象が存在する存在確率を取得することと、
前記測位対象が前記複数の代表点のそれぞれに移動する確率を示す遷移確率を取得することと、
前記存在確率及び前記遷移確率に基づいて、前記測位対象の次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する存在確率を測位前存在確率として取得することと、
前記次の測位データを取得することと、
前記次の測位データに基づいて、前記次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する前記存在確率を更新することにより、測位後存在確率を取得することと、
を含む、位置推定方法。
【請求項9】
請求項8に記載の方法を少なくとも1つのプロセッサに実行させる、位置推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測位データを使って測位対象の位置を推定するための装置、方法及びプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、複数の基地局から出力される電波の受信強度に基づく測位、GPS等の衛星測位システムを使った測位などが知られている。これらの測位手法では、ノイズ等の影響により測位データに誤差が含まれる。そのため、特許文献1に開示された技術では、誤差を含みうる測位データを、測位対象に設けた加速度センサ等の検出値に基づいて算出される変位データを用いて補正し、測位誤差を低減させている。
【先行技術文献】
【特許文献】
【0003】
特開2021-50969号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の構成とは異なるより簡易な構成によって、測位データに生じる誤差の影響を低減することが望まれる場合がある。
【0005】
そこで本開示の一態様は、簡易な構成にて、測位データに基づいて推定される測位対象の位置の誤差を低減し、位置推定精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る位置推定装置は、所定エリアにおいて測位対象が移動可能な空間に離散的に分布する複数の代表点の座標を離散化マップとして予め記憶したメモリと、前記離散化マップに基づいて演算処理を行う処理回路と、を備える。前記処理回路は、前記複数の代表点のそれぞれに前記測位対象が存在する存在確率を取得することと、前記測位対象が前記複数の代表点のそれぞれに移動する確率を示す遷移確率を取得することと、前記存在確率及び前記遷移確率に基づいて、前記測位対象の次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する存在確率を測位前存在確率として取得することと、前記次の測位データを取得することと、前記次の測位データに基づいて、前記次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する前記存在確率を更新することにより、測位後存在確率を取得することと、を行うように構成されている。
【0007】
本開示の一態様に係る位置推定方法は、所定エリアにおいて測位対象が移動可能な空間に離散的に分布する複数の代表点のそれぞれに前記測位対象が存在する存在確率を取得することと、前記測位対象が前記複数の代表点のそれぞれに移動する確率を示す遷移確率を取得することと、前記存在確率及び前記遷移確率に基づいて、前記測位対象の次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する存在確率を測位前存在確率として取得することと、前記次の測位データを取得することと、前記次の測位データに基づいて、前記次の測位データの測位時に前記複数の代表点のそれぞれに前記測位対象が存在する前記存在確率を更新することにより、測位後存在確率を取得することと、を含む。
【0008】
本開示の一態様に係る位置推定プログラムは、前記方法を少なくとも1つのプロセッサに実行させる。前記プログラムは、コンピュータ読み取り可能な記憶媒体に記憶され得る。前記記憶媒体は、非一時的(non-transitory)で有形(tangible)な媒体である。前記記憶媒体は、コンピュータ(例えば、携帯情報端末、パーソナルコンピュータ、サーバ等)に内蔵又は外付けされ得る。前記記憶媒体は、RAM、ROM、EEPROM、ストレージ等を含み、例えば、ハードディスク、フラッシュメモリ、光ディスク等とし得る。前記記憶媒体に記憶されたプログラムは、前記記憶媒体が直接接続されるコンピュータにおいて実行されてもよいし、前記記憶媒体とネットワーク(例えば、インターネット)を介して接続されたコンピュータにおいて実行されてもよい。
【発明の効果】
【0009】
本開示の一態様によれば、所定エリアに離散的に分布する複数の代表点のいずれかに測位対象が存在するとみなされ、測位対象が複数の代表点のそれぞれに存在する存在確率を取得し、その取得された存在確率が測位対象の測位データに基づいて更新される。そのため、測位データの精度が低い場合でも、測位対象が存在する位置を確率に基づいて合理的に推定できる。よって、簡易な構成によって、推定される測位対象の位置を精度良く推定できる。
【図面の簡単な説明】
【0010】
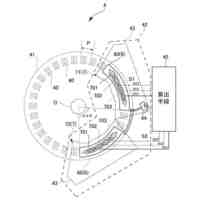
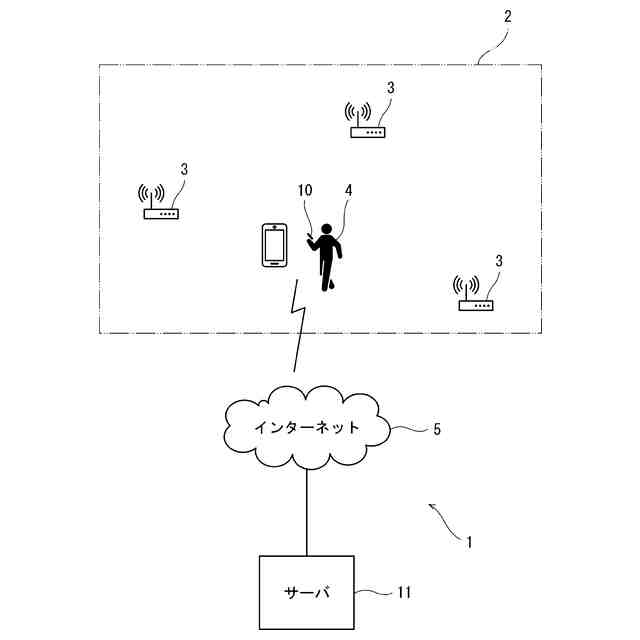
図1は、実施形態に係る位置推定システムの概要図である。
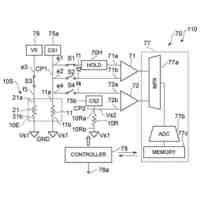
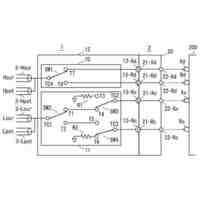
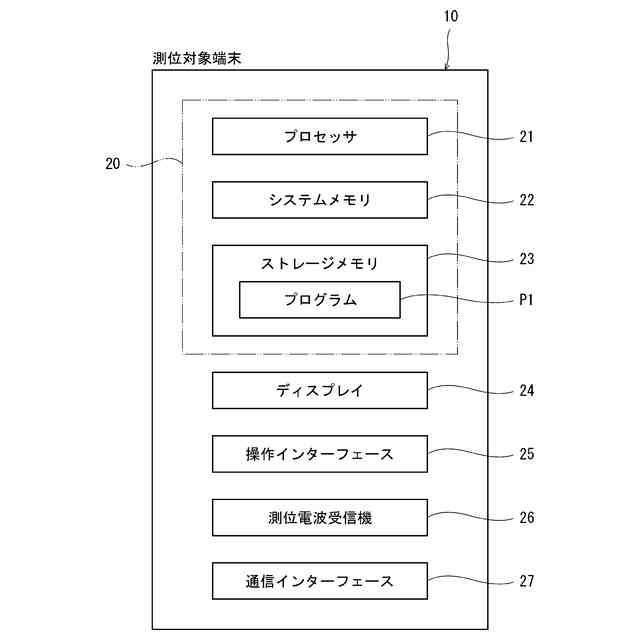
図2は、図1の測位対象端末のブロック図である。
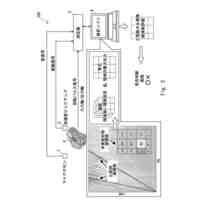
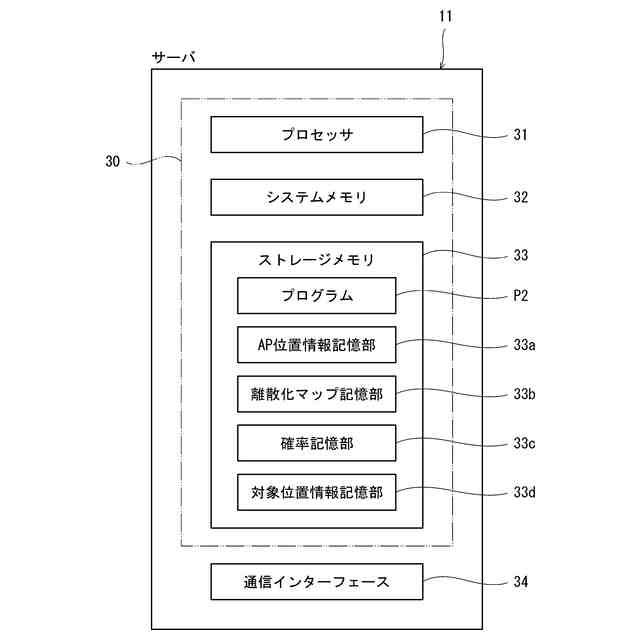
図3は、図1のサーバのブロック図である。
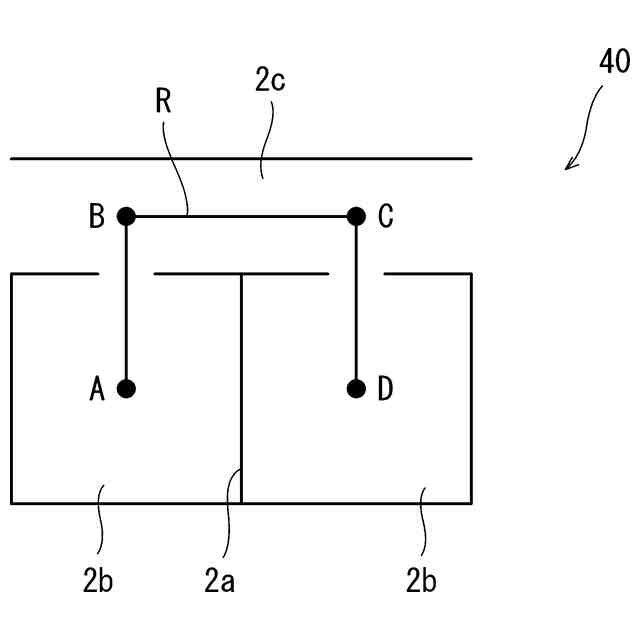
図4は、図3のサーバに記憶された離散化マップの模式図である。
図5は、図3のサーバに記憶された遷移確率テーブルの図面である。
図6は、図3のサーバによる位置推定のフローチャートである。
図7Aは、図4の離散化マップにおける各代表点に測位対象が存在する存在確率を示す図面である。図7Bは、各代表点に測位対象が存在する存在確率の一期先予測(測位前存在確率)を示す図面である。図7Cは、次の測位データに基づいて更新された存在確率(測位後存在確率)を示す図面である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
漏電検出器
1か月前
株式会社大真空
センサ
1か月前
甲神電機株式会社
電流センサ
1か月前
株式会社大真空
センサ
12日前
甲神電機株式会社
電流検出器
1か月前
ユニパルス株式会社
ロードセル
1か月前
東レ株式会社
液体展開用シート
27日前
株式会社トプコン
測量装置
1か月前
アズビル株式会社
湿度センサ
20日前
学校法人同志社
測位システム
今日
日本FC企画株式会社
特性試験装置
8日前
アズビル株式会社
圧力センサ
5日前
株式会社トプコン
植物センサ
23日前
株式会社ミツトヨ
エンコーダ
6日前
日本碍子株式会社
ガスセンサ
5日前
日本精機株式会社
基板及び表示装置
今日
株式会社東芝
センサ
5日前
キヤノン電子株式会社
サーボ加速度計
27日前
キヤノン電子株式会社
サーボ加速度計
27日前
キヤノン電子株式会社
サーボ加速度計
27日前
株式会社クボタ
作業車両
26日前
株式会社東芝
センサ
19日前
株式会社ミツトヨ
変位測定装置
19日前
株式会社小野測器
回転計測装置
19日前
エスペック株式会社
環境試験装置
5日前
豊田合成株式会社
表示装置
1か月前
アズビル株式会社
検査用プローブ
13日前
株式会社ノーリツ
温度センサ取付具
6日前
株式会社ノーリツ
温度センサ取付具
6日前
個人
レーザージャイロ応用重力場計測装置
7日前
古河電気工業株式会社
漏水検知構造
6日前
トヨタ自動車株式会社
異音解析方法
19日前
トヨタ自動車株式会社
画像検査装置
1か月前
積水ハウス株式会社
測定治具
5日前
トヨタ自動車株式会社
NVH解析装置
19日前
一丸ファルコス株式会社
コラーゲンの検出方法
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ