TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024097724
公報種別
公開特許公報(A)
公開日
2024-07-19
出願番号
2023001402
出願日
2023-01-07
発明の名称
ロボットハンド
出願人
株式会社日本キャリア工業
代理人
主分類
B25J
15/08 20060101AFI20240711BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】トレーへの盛り付け時等に、各食品片がばらばらになりにくく、集合体の状態の乱れを少なくすることのできるロボットハンドを実現すること。
【解決手段】食品を掬い上げて移動させるロボットハンドに、単一の食品片または食品片の集合体を、正方向への移動によって掬い上げ、逆方向への移動によって下ろす第1ベルト装置を設け、この第1ベルト装置の上側に間隔をおいて第2ベルト装置を配置し、第1ベルト装置の上面と第2ベルト装置の下面との上下間隔を変更する作動部材を設ける。また、第1ベルト装置の上面に掬い上げられることによって垂れ下がった食品または集合体の端部を、第1ベルト装置の下面側に折り畳んでから押し上げるか、または、第1ベルト装置の下面側に折り畳みながら押し上げる作動部材を設ける。
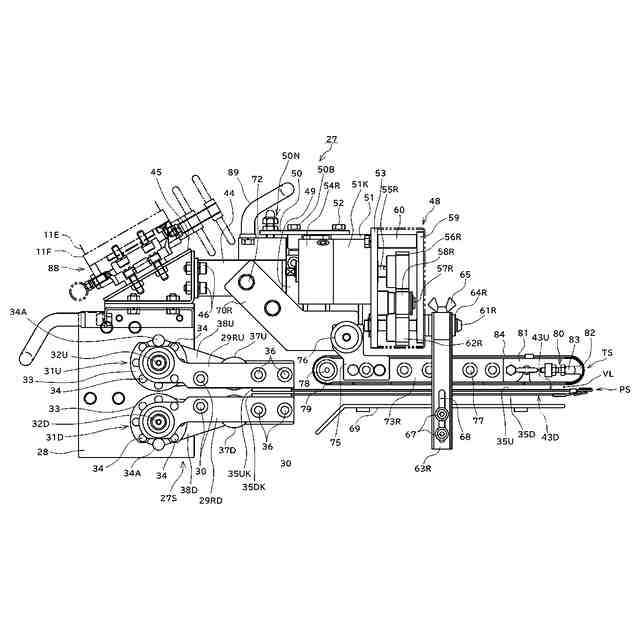
【選択図】図3
特許請求の範囲
【請求項1】
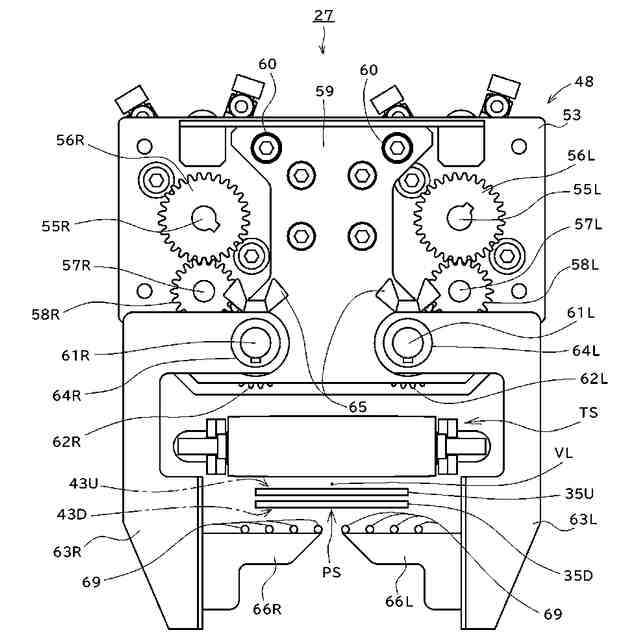
食品を掬い上げて移動させるロボットハンド(27)であって、このロボットハンド(27)に、単一の食品片(m)または食品片(m)の集合体(M)を、正方向への移動によって掬い上げ、逆方向への移動によって下ろす第1ベルト装置(PS)を設け、この第1ベルト装置(PS)の上側に間隔をおいて第2ベルト装置(TS)を配置し、前記第1ベルト装置(PS)の上面と第2ベルト装置(TS)の下面との上下間隔を変更する作動部材(63L,63R)を設けたことを特徴とするロボットハンド。
続きを表示(約 1,500 文字)
【請求項2】
前記第1ベルト装置(PS)の上面と前記第2ベルト装置(TS)の下面とが同方向に移動するように構成した請求項1に記載のロボットハンド。
【請求項3】
前記第2ベルト装置(TS)を、ロボットハンド(27)の本体(27S)に対して固定的に支持し、前記第1ベルト装置(PS)の上面を、前記作動部材(63L,63R)によって、第2ベルト装置(TS)の下面に対して上下動させるように構成した請求項2に記載のロボットハンド。
【請求項4】
載置状態の食品片(m)または集合体(M)を、正方向へ移動する第1ベルト装置(PS)の上面と前記第2ベルト装置(TS)の下面との間の間隔部(VL)に導入しながら掬い上げ、前記作動部材(63L,63R)によって前記第1ベルト装置(PS)の上面と第2ベルト装置(TS)の下面との上下間隔を縮小して、掬い上げた食品片(m)または集合体(M)を挟んだ状態で保持する一方、前記作動部材(63L,63R)によって前記第1ベルト装置(PS)の上面と第2ベルト装置(TS)の下面との上下間隔を拡大して、食品片(m)または集合体(M)の保持を解除し、前記第1ベルト装置(PS)の上面および第2ベルト装置(TS)の下面を逆方向へ移動させて、この食品片(m)または集合体(M)を下ろすように構成した請求項1または請求項2または請求項3に記載のロボットハンド。
【請求項5】
前記第2ベルト装置(TS)を、ロボットハンド(27)の本体(27S)に対して着脱可能に構成した請求項4に記載のロボットハンド。
【請求項6】
食品を掬い上げて移動させるロボットハンド(27)であって、このロボットハンド(27)に、単一の食品片(m)または食品片(m)の集合体(M)を、正方向への移動によって掬い上げ、逆方向への移動によって下ろす第1ベルト装置(PS)を設け、この第1ベルト装置(PS)の上面に掬い上げられることによって垂れ下がった食品片(m)または集合体(M)の端部を、前記第1ベルト装置(PS)の下面側に折り畳んでから押し上げるか、または、前記第1ベルト装置(PS)の下面側に折り畳みながら押し上げる作動部材(63L,63R)を設けたことを特徴とするロボットハンド。
【請求項7】
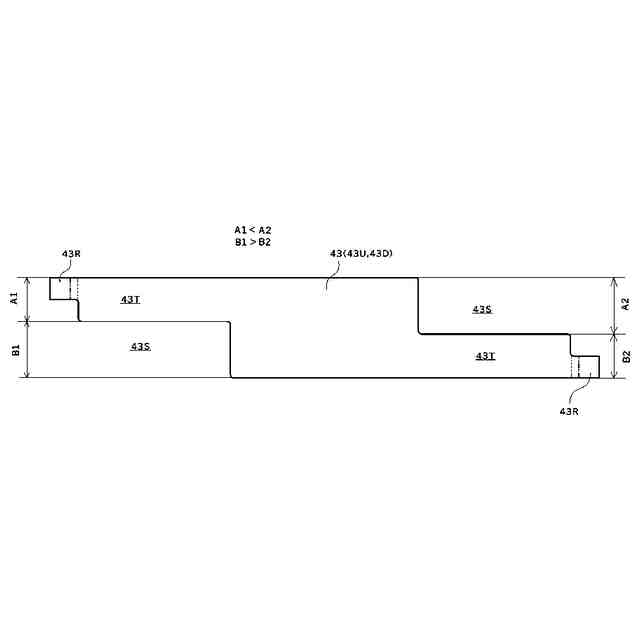
前記第1ベルト装置(PS)に、略平行な姿勢で上下に近接配置した上ベルト(43U)および下ベルト(43D)を備え、この上ベルト(43U)の上面と下ベルト(43D)の下面とが同方向に移動するように構成した請求項6に記載のロボットハンド。
【請求項8】
前記上ベルト(43U)の上面に掬い上げることによって垂れ下がった食品片(m)または集合体(M)の端部を、前記作動部材(63L,63R)によって下ベルト(43D)の下面側に折り畳んでから押し上げるか、または、下ベルト(43D)の下面側に折り畳みながら押し上げるように構成した請求項7に記載のロボットハンド。
【請求項9】
前記作動部材(63L,63R)による食品片(m)または集合体(M)の端部の押し上げを解除した後に、または、押し上げを解除しながら、前記上ベルト(43U)および下ベルト(43D)を逆方向へ移動させて折り畳まれた食品片(m)または集合体(M)を下ろすように構成した請求項8に記載のロボットハンド。
【請求項10】
前記作動部材(63L,63R)を、ロボットハンド(27)の本体(27S)に対して着脱自在に構成した請求項6から請求項9のいずれか一項に記載のロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
例えば食品加工工場では、塊状の生肉等の食品が、切断装置によってその先端部から所定間隔で順次切断され、食品片としてコンベア上に切り出される。
また、これらの複数の食品片は、その一部が互いに重なるように、ずらしながらコンベア上に順次載置され、複数の食品片からなる集合体が形成される。
この集合体を、作業者がヘラのような道具を使って掬い上げ、食品用のトレーに盛り付ける。
トレーに盛り付けられた集合体は、このトレーごと包装され、食品の種類、計測された総重量、価格等が印字されたラベルが貼られて、商品として出荷される。
【0003】
近年、このような食品片または集合体の盛り付け作業を自動化する試みがなされており、例えば特許文献1には、食品片をロボットハンドに備えたベルト装置によって掬い上げ、所定の位置に載置する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2009-72209号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示されたロボットハンドには、掬い上げた集合体の状態を保持する手段が備えられていない。
すなわち、集合体を形成する各食品片どうしの付着性を高める手段が設けられていないため、掬い上げた集合体を下ろすときに各食品片がばらばらになり、集合体の状態が乱れる問題が起こりうる。
【0006】
例えば、冷凍状態やチルド状態の塊状の生肉から切り出した肉片を、その一部が互いに重なるように載置した集合体の場合、その温度や油脂含有状態によって各肉片どうしの付着性が低くなることがある。
このため、トレーへの盛り付け時等に各食品片がばらばらになりやすく、集合体の盛り付け状態が乱れやすくなる。
これによって集合体の手直しが必要となり、生産能率が低下する問題を抱えていた。
【0007】
本発明は、上述のような課題を解決し、トレーへの盛り付け時等に、各食品片がばらばらになりにくく、集合体の状態の乱れを少なくすることのできるロボットハンドを実現することを目的とする。
【課題を解決するための手段】
【0008】
本開示は、上述の課題を解決するために、以下の技術的手段を講じる。
すなわち、請求項1に記載の発明は、食品を掬い上げて移動させるロボットハンド(27)であって、このロボットハンド(27)に、単一の食品片(m)または食品片(m)の集合体(M)を、正方向への移動によって掬い上げ、逆方向への移動によって下ろす第1ベルト装置(PS)を設け、この第1ベルト装置(PS)の上側に間隔をおいて第2ベルト装置(TS)を配置し、前記第1ベルト装置(PS)の上面と第2ベルト装置(TS)の下面との上下間隔を変更する作動部材(63L,63R)を設けたことを特徴とするロボットハンドとする。
【0009】
請求項2に記載の発明は、前記第1ベルト装置(PS)の上面と前記第2ベルト装置(TS)の下面とが同方向に移動するように構成した請求項1に記載のロボットハンドとする。
【0010】
請求項3に記載の発明は、前記第2ベルト装置(TS)を、ロボットハンド(27)の本体(27S)に対して固定的に支持し、前記第1ベルト装置(PS)の上面を、前記作動部材(63L,63R)によって、第2ベルト装置(TS)の下面に対して上下動させるように構成した請求項2に記載のロボットハンドとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
4日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
12日前
株式会社ダイヘン
搬送装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
制御装置
3か月前
SMC株式会社
グリッパ
4か月前
川崎重工業株式会社
ロボットアーム
12日前
日本車輌製造株式会社
締め付け工具
12日前
川崎重工業株式会社
ロボットアーム
12日前
川崎重工業株式会社
ロボットリスト
12日前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボットシステム
12日前
学校法人立命館
ロボットハンド
3か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
CKD株式会社
吸着型搬送装置
26日前
長堀工業株式会社
締結装置
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
29日前
株式会社安川電機
ロボット
29日前
株式会社安川電機
ロボット
29日前
株式会社アイエイアイ
グリッパー
2か月前
トヨタ自動車株式会社
ロボットチャック
4か月前
ジヤトコ株式会社
圧入装置
25日前
株式会社アマダ
磁気吸着装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社スター精機
ワーク搬送装置
1日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ