TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024179861
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023099115
出願日
2023-06-16
発明の名称
遠隔制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/09 20060101AFI20241219BHJP(信号)
要約
【課題】制御態様が互いに異なる各車両に対して適切な制御を行う。
【解決手段】遠隔制御によって移動体を自動で移動させる遠隔制御装置は、移動体が、第1の移動体と、第2の移動体と、のうちのいずれであるかの識別を実行する移動体識別部と、制御指令を移動体に対して送信する遠隔制御指令部と、を備え、遠隔制御指令部は、移動体が第1の移動体であると識別された場合に、制御指令として制御値を生成し、第1の移動体に対して制御値を送信することと、移動体が第2の移動体であると識別された場合に、制御指令として第2の移動体に対して制御値生成用情報を送信することと、のうちの少なくとも一方を実行する。
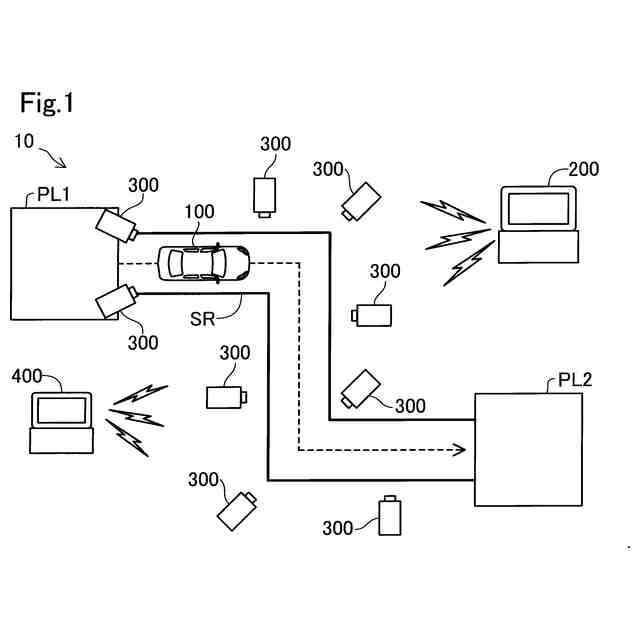
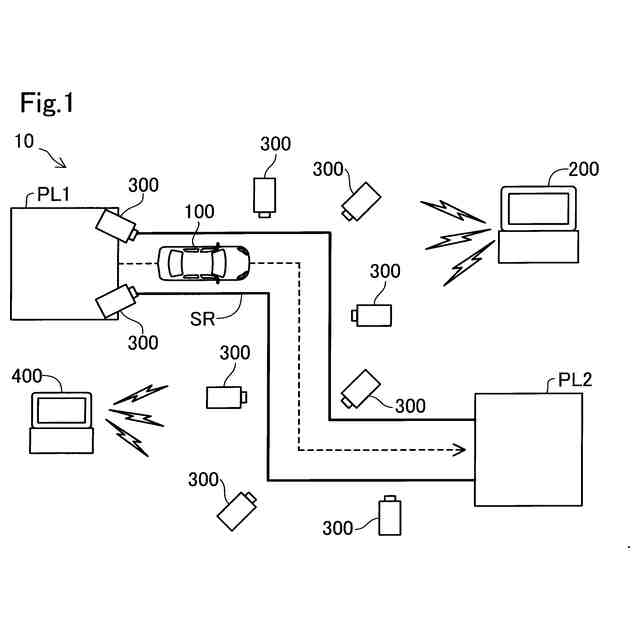
【選択図】図1
特許請求の範囲
【請求項1】
遠隔制御によって移動体を自動で移動させる遠隔制御装置であって、
前記移動体が、
前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動する第1の移動体と、
前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動する第2の移動体と、
のうちのいずれであるかの識別を実行する移動体識別部と、
制御指令を前記移動体に対して送信する遠隔制御指令部と、
を備え、
前記遠隔制御指令部は、
前記移動体が前記第1の移動体であると識別された場合に、前記制御指令として前記制御値を生成し、前記第1の移動体に対して前記制御値を送信することと、
前記移動体が前記第2の移動体であると識別された場合に、前記制御指令として前記第2の移動体に対して前記制御値生成用情報を送信することと、
のうちの少なくとも一方を実行する、
遠隔制御装置。
続きを表示(約 1,800 文字)
【請求項2】
遠隔制御によって移動体を自動で移動させる遠隔制御装置であって、
前記移動体が現在置かれている製造工程を示す製造工程情報を取得する製造工程情報取得部と、
制御指令を前記移動体に対して送信する遠隔制御指令部と、
を備え、
前記移動体は、
前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動することと、
前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動することと、
を実行可能であり、
前記遠隔制御指令部は、
前記製造工程が、前記移動体に対して前記制御値の送信が必要な工程であると前記製造工程情報に基づき特定された場合に、前記制御指令として前記制御値を生成し、前記移動体に対して前記制御値を送信することと、
前記製造工程が、前記移動体に対して前記制御値の送信が必要な工程でないと前記製造工程情報に基づき特定された場合に、前記制御指令として前記移動体に対して前記制御値生成用情報を送信することと、
のうちの少なくとも一方を実行する、
遠隔制御装置。
【請求項3】
遠隔制御によって移動体を自動で移動させる遠隔制御装置であって、
前記移動体を検出するための情報である移動体検出情報を取得する移動体検出情報取得部と、
前記移動体検出情報を利用して前記移動体の製造状態である移動体製造状態を特定する移動体製造状態特定部と、
制御指令を前記移動体に対して送信する遠隔制御指令部と、
を備え、
前記移動体は、
前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動することと、
前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動することと、
を実行可能であり、
前記遠隔制御指令部は、
前記移動体製造状態が、前記制御値の送信が必要な状態であると特定された場合に、前記制御指令として前記制御値を生成し、前記移動体に対して前記制御値を送信することと、
前記移動体製造状態が、前記制御値の送信が必要な状態でないと特定された場合に、前記制御指令として前記移動体に対して前記制御値生成用情報を送信することと、
のうちの少なくとも一方を実行する、
遠隔制御装置。
【請求項4】
遠隔制御によって移動体を自動で移動させる遠隔制御装置であって、
前記移動体がプラットフォームの状態であるか否かを示す情報を取得するプラットフォーム情報取得部と、
制御指令を前記移動体に対して送信する遠隔制御指令部と、
を備え、
前記移動体は、
前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動することと、
前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動することと、
を実行可能であり、
前記遠隔制御指令部は、
前記移動体がプラットフォームの状態である場合に、前記制御指令として前記制御値を生成し、前記移動体に対して前記制御値を送信する、
遠隔制御装置。
【請求項5】
請求項1に記載の遠隔制御装置であって、
前記移動体識別部は、前記移動体の撮像画像を利用して、前記識別を実行する、
遠隔制御装置。
【請求項6】
請求項1または請求項5に記載の遠隔制御装置であって、
前記移動体は、製造工程に置かれており、
前記移動体識別部は、前記移動体の製造状況を示す製造管理情報を利用して、前記識別を実行する、
遠隔制御装置。
【請求項7】
請求項1から請求項5のいずれか一項に記載の遠隔制御装置であって、
前記制御値生成用情報は、前記移動体を移動させる経路を示す経路情報を含む、
遠隔制御装置。
【請求項8】
請求項1から請求項5のいずれか一項に記載の遠隔制御装置であって、
前記制御値は、前記移動体の舵角を指示する値および前記移動体の加速度を指示する値を含む、
遠隔制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔制御装置に関する。
続きを表示(約 4,700 文字)
【背景技術】
【0002】
車両の製造工程において、遠隔制御により車両を走行させる技術が知られている。また、車両を遠隔制御するための制御指令として、舵角や加速度等の具体的な制御内容を示す制御値を送信することと、制御値の生成に利用される情報を送信することとが提案されている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1においては、上記2種類の制御指令を適切に使い分けて車両を制御する手段について十分に検討されていない。かかる問題は、車両に限らず、任意の種類の移動体においても共通する。また、製造工程に限らず、検査工程や出荷工程において完成後の車両を遠隔制御により移動させる場合においても共通する。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、遠隔制御によって移動体を自動で移動させる遠隔制御装置が提供される。この遠隔制御装置は、前記移動体が、前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動する第1の移動体と、前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動する第2の移動体と、のうちのいずれであるかの識別を実行する移動体識別部と、制御指令を前記移動体に対して送信する遠隔制御指令部と、を備え、前記遠隔制御指令部は、前記移動体が前記第1の移動体であると識別された場合に、前記制御指令として前記制御値を生成し、前記第1の移動体に対して前記制御値を送信することと、前記移動体が前記第2の移動体であると識別された場合に、前記制御指令として前記第2の移動体に対して前記制御値生成用情報を送信することと、のうちの少なくとも一方を実行する。
この遠隔制御装置によれば、移動体が第1の移動体と第2の移動体とのうちのいずれであるかの識別を実行し、移動体が第1の移動体である場合には、制御指令として制御値を生成し第1の移動体に対して制御値を送信することと、移動体が第2の移動体であると識別された場合に、制御指令として第2の移動体に対して制御値生成用情報を送信することと、のうちの少なくとも一方を実行する。これにより、移動体が、第1の移動体と第2の移動体のいずれであるかに応じて適切な制御指令を送信でき、移動体に対して適切な制御を行うことができる。
(2)本開示の他の形態によれば、遠隔制御によって移動体を自動で移動させる遠隔制御装置が提供される。この遠隔制御装置は、前記移動体が現在置かれている製造工程を示す製造工程情報を取得する製造工程情報取得部と、制御指令を前記移動体に対して送信する遠隔制御指令部と、を備え、前記移動体は、前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動することと、前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動することと、を実行可能であり、前記遠隔制御指令部は、前記製造工程が、前記移動体に対して前記制御値の送信が必要な工程であると前記製造工程情報に基づき特定された場合に、前記制御指令として前記制御値を生成し、前記移動体に対して前記制御値を送信することと、前記製造工程が、前記移動体に対して前記制御値の送信が必要な工程でないと前記製造工程情報に基づき特定された場合に、前記制御指令として前記移動体に対して前記制御値生成用情報を送信することと、のうちの少なくとも一方を実行する。
この遠隔制御装置によれば、製造工程情報を取得し、移動体が現在置かれている製造工程が、移動体に対して制御値の送信が必要な工程である場合に、制御指令として制御値を生成し移動体に対して制御値を送信することと、移動体が現在置かれている製造工程が、移動体に対して制御値の送信が必要な工程でない場合に、制御指令として制御値生成用情報を生成し移動体に対して制御値生成用情報を送信することと、のうちの少なくとも一方を実行する。これにより車両が現在置かれている製造工程に応じて適切な制御指令を送信でき、移動体に対して適切な制御を行うことができる。
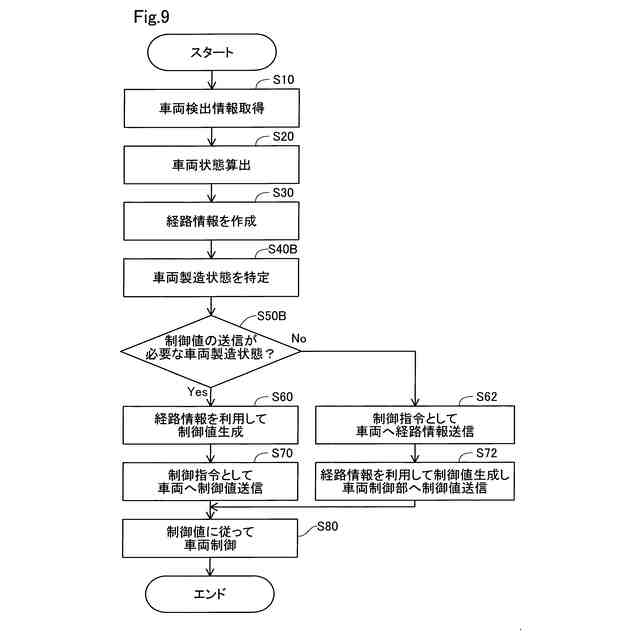
(3)本開示の他の形態によれば、遠隔制御によって移動体を自動で移動させる遠隔制御装置が提供される。この遠隔制御装置は、前記移動体を検出するための情報である移動体検出情報を取得する移動体検出情報取得部と、前記移動体検出情報を利用して前記移動体の製造状態である移動体製造状態を特定する移動体製造状態特定部と、制御指令を前記移動体に対して送信する遠隔制御指令部と、を備え、前記移動体は、前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動することと、前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動することと、を実行可能であり、前記遠隔制御指令部は、前記移動体製造状態が、前記制御値の送信が必要な状態であると特定された場合に、前記制御指令として前記制御値を生成し、前記移動体に対して前記制御値を送信することと、前記移動体製造状態が、前記制御値の送信が必要な状態でないと特定された場合に、前記制御指令として前記移動体に対して前記制御値生成用情報を送信することと、のうちの少なくとも一方を実行する。
この遠隔制御装置によれば、移動体検出情報を利用して移動体製造状態を特定し、移動体製造状態が、制御値の送信が必要な状態である場合に、制御指令として制御値を生成し移動体に対して制御値を送信することと、移動体製造状態が、制御値の送信が必要な状態でない場合に、制御指令として移動体に対して制御値生成用情報を送信することと、のうちの少なくとも一方を実行する。これにより車両検出情報を利用して特定された移動体製造状態に応じて適切な制御指令を送信でき、移動体に対して適切な制御を行うことができる。
(4)本開示の他の形態によれば、遠隔制御によって移動体を自動で移動させる遠隔制御装置が提供される。この遠隔制御装置は、前記移動体がプラットフォームの状態であるか否かを示す情報を取得するプラットフォーム情報取得部と、制御指令を前記移動体に対して送信する遠隔制御指令部と、を備え、前記移動体は、前記移動体の移動を制御する制御値を受信し、前記制御値に従って移動することと、前記制御値の生成に利用される制御値生成用情報を受信し、前記制御値生成用情報を利用して前記制御値を生成し、生成された前記制御値に従って移動することと、を実行可能であり、前記遠隔制御指令部は、前記移動体がプラットフォームの状態である場合に、前記制御指令として前記制御値を生成し、前記移動体に対して前記制御値を送信する。
この遠隔制御装置によれば、移動体がプラットフォームの状態である場合に、制御指令として制御値を生成し移動体に対して制御値を送信するので、移動体がプラットフォームの状態であるか否かに応じて、移動体に対して適切な制御を行うことができる。
(5)上記遠隔制御装置において、前記移動体識別部は、前記移動体の撮像画像を利用して、前記識別を実行してもよい。
この遠隔制御装置によれば、移動体が、第1の移動体と第2の移動体のいずれであるかを、移動体の撮像画像を利用して識別を実行するので、精度よく識別できる。
(6)上記遠隔制御装置において、前記移動体は、製造工程に置かれており、前記移動体識別部は、前記移動体の製造状況を示す製造管理情報を利用して、前記識別を実行してもよい。
この遠隔制御装置によれば、製造管理情報を利用して識別を実行するので、製造工程に置かれた移動体の製造状況に応じて適切な制御を行うことができる。
(7)上記遠隔制御装置において、前記制御値生成用情報は、前記移動体を移動させる経路を示す経路情報を含んでもよい。
この遠隔制御装置によれば、経路情報を利用して制御値を生成可能である移動体の移動を制御できる。
(8)上記遠隔制御装置において、前記制御値は、前記移動体の舵角を指示する値および前記移動体の加速度を指示する値を含んでもよい。
この遠隔制御装置によれば、舵角と加速度とを制御されて移動する移動体の移動を制御できる。
【図面の簡単な説明】
【0007】
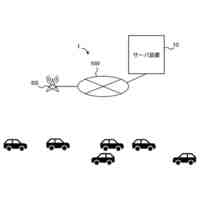
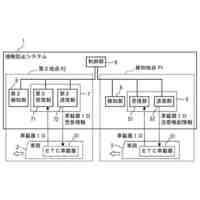
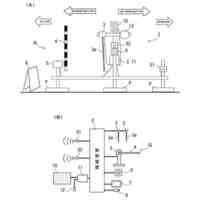
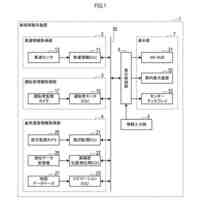
第1実施形態の遠隔制御装置を備える遠隔制御システムの概略構成を示す説明図である。
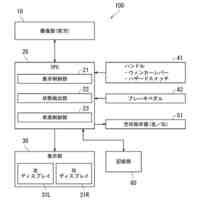
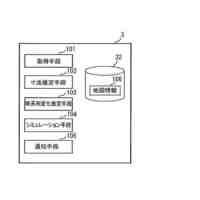
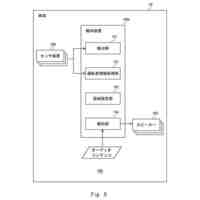
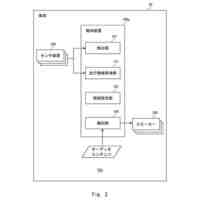
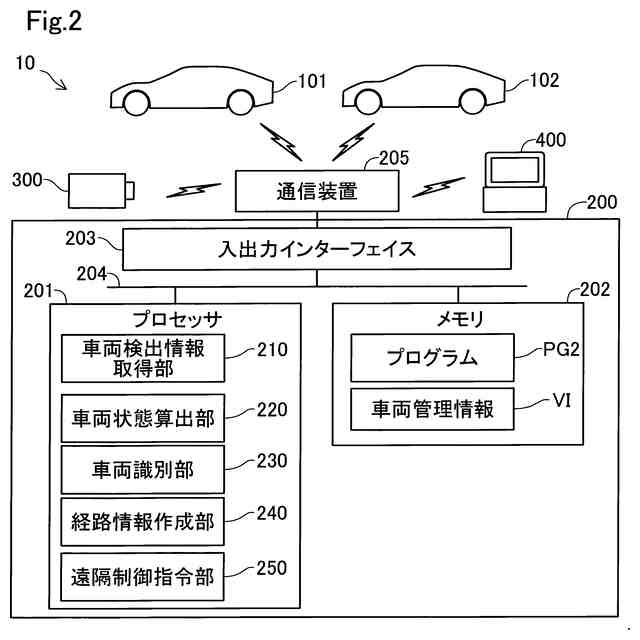
第1実施形態の遠隔制御装置を備える遠隔制御システムの概略構成を示すブロック図である。
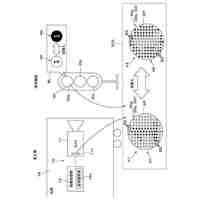
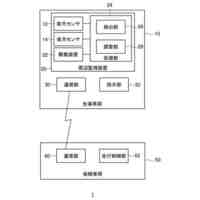
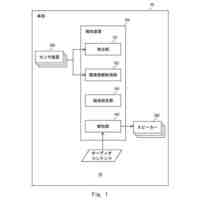
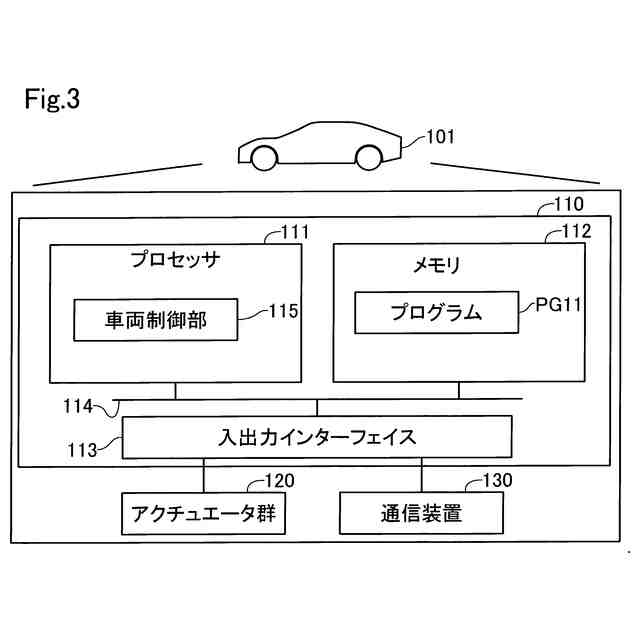
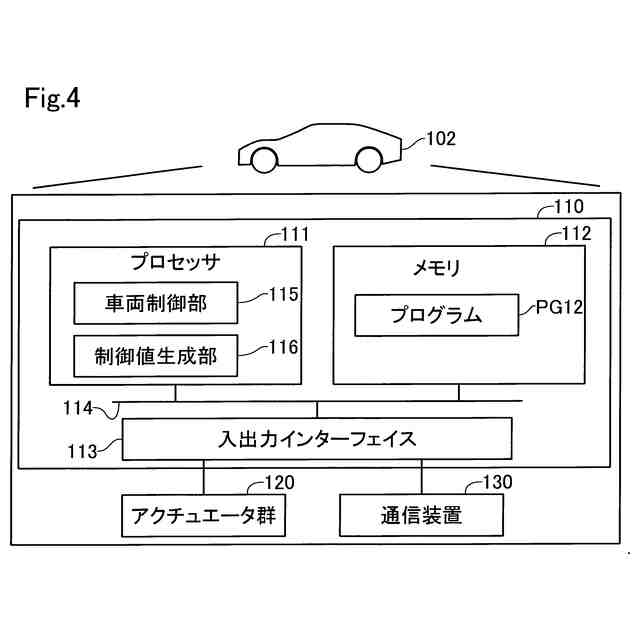
第1の車両タイプである車両の概略構成を示すブロック図である。
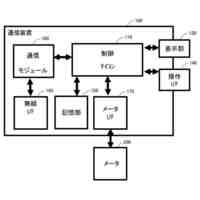
第2の車両タイプである車両の概略構成を示すブロック図である。
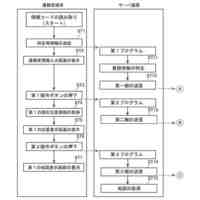
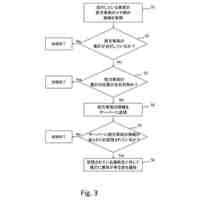
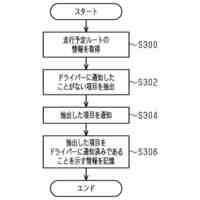
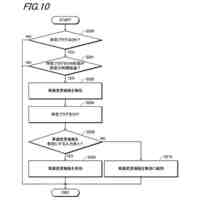
第1実施形態の車両制御処理の手順を示すフローチャートである。
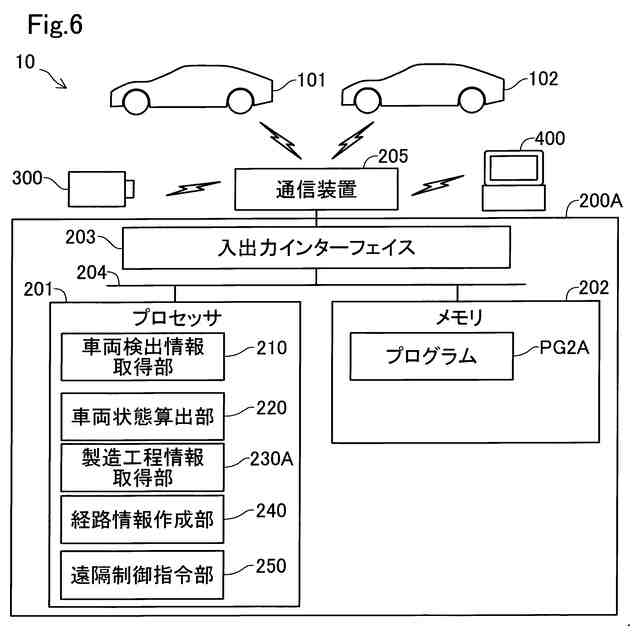
第2実施形態の遠隔制御装置を備える遠隔制御システムの概略構成を示すブロック図である。
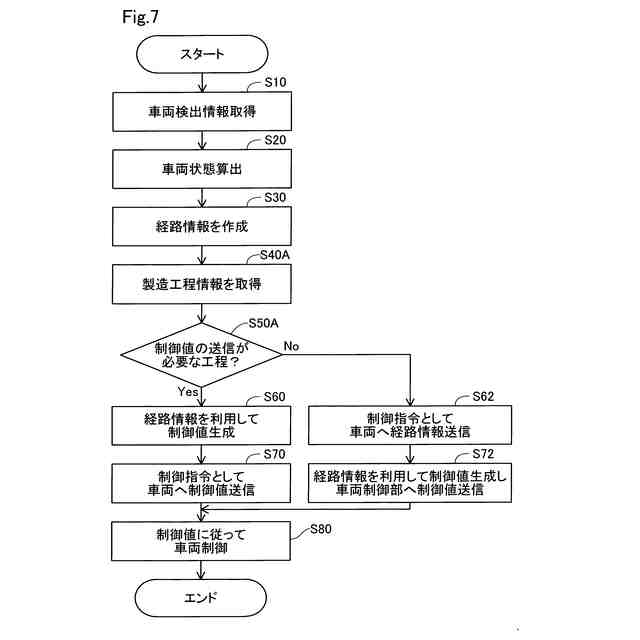
第2実施形態の車両制御処理の手順を示すフローチャートである。
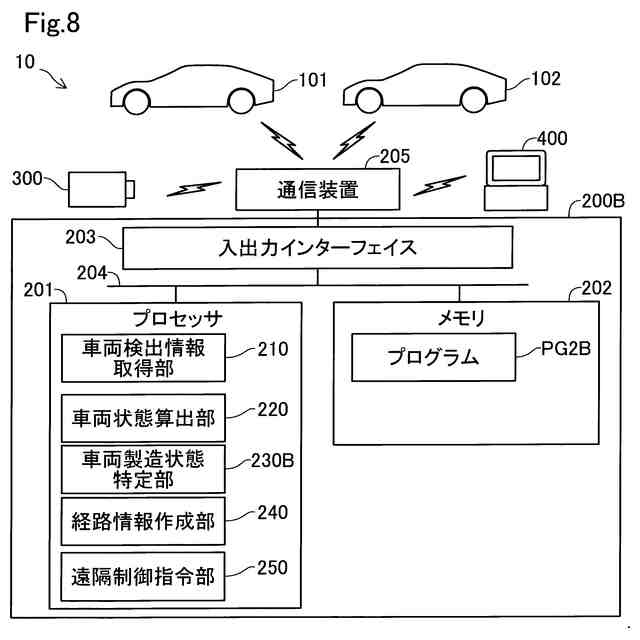
第3実施形態の遠隔制御装置を備える遠隔制御システムの概略構成を示すブロック図である。
第3実施形態の車両制御処理の手順を示すフローチャートである。
第4実施形態の車両制御処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
A.第1実施形態:
A-1.システム構成:
図1は、本実施形態における遠隔制御装置200を備える遠隔制御システム10の概略構成を示す説明図である。遠隔制御システム10は、移動体としての車両100と、遠隔制御により車両100を自動で走行させる遠隔制御装置200と、車両100の3次元点群データを測定する複数の車両検出器300と、車両100の製造工程の管理を行う工程管理装置400と、を備える。
【0009】
本実施形態では、車両100は、電気自動車(BEV:Battery Electric Vehicle)として構成されている。なお、車両100は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。また、車両100に代えて、例えば、電動垂直離着陸機(いわゆる空飛ぶ自動車)等の他の任意の種類の移動体を用いてもよい。
【0010】
本実施形態では、遠隔制御装置200は、車両100の製造工程において車両100の遠隔制御を実行する。車両100を製造する工場は、第1場所PL1と第2場所PL2とを備えている。第1場所PL1は、例えば、車両100の組み立てが実施される場所であり、第2場所PL2は、例えば、車両100の検査が実施される場所である。第1場所PL1と第2場所PL2とは、車両100が走行可能な走行路SRによって接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
1か月前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
25日前
株式会社ニカデン
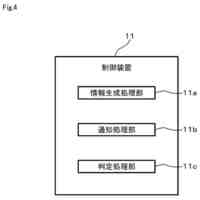
検出装置
11日前
株式会社サンライン
発炎筒携行容器
1か月前
株式会社あおい興産
避難誘導灯
19日前
ニッタン株式会社
発信機
25日前
株式会社国際電気
防災システム
6日前
ニッタン株式会社
発信機
25日前
能美防災株式会社
表示灯カバー
2か月前
日本無線株式会社
人物探索システム
2か月前
能美防災株式会社
非常放送システム
2か月前
京セラ株式会社
案内システム及び案内方法
2か月前
京セラ株式会社
制御装置
25日前
トヨタ自動車株式会社
運転支援システム
2か月前
シャープ株式会社
表示装置
1か月前
トヨタ自動車株式会社
運転支援装置
2か月前
株式会社豊田自動織機
運行表示装置
12日前
戸田建設株式会社
検知システム
1か月前
日本信号株式会社
信号システム及び信号灯器
18日前
トヨタ自動車株式会社
ドライブレコーダ
2か月前
トヨタ自動車株式会社
渋滞検知システム
2か月前
トヨタ自動車株式会社
情報提供システム
1か月前
株式会社JR西日本テクシア
接触防止システム
18日前
トヨタ自動車株式会社
周辺監視装置
2か月前
鹿島建設株式会社
火災分析装置およびプログラム
2か月前
株式会社市川工務店
車両用ゲート開閉装置
2か月前
株式会社JVCケンウッド
報知装置及び報知方法
25日前
株式会社JVCケンウッド
報知装置及び報知方法
25日前
シャープ株式会社
通信装置および通信方法
1か月前
株式会社IHI
運転支援装置
1か月前
本田技研工業株式会社
制御装置
2か月前
株式会社京三製作所
交通信号制御システム
11日前
株式会社JVCケンウッド
報知装置及び報知方法
25日前
株式会社デンソー
障害物通知システム
19日前
株式会社デンソー
車両用表示装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ