TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024179347
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023098112
出願日
2023-06-14
発明の名称
動力伝達装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
F16H
3/091 20060101AFI20241219BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】被駆動部をロック状態に維持することが可能な動力伝達装置を提供する。
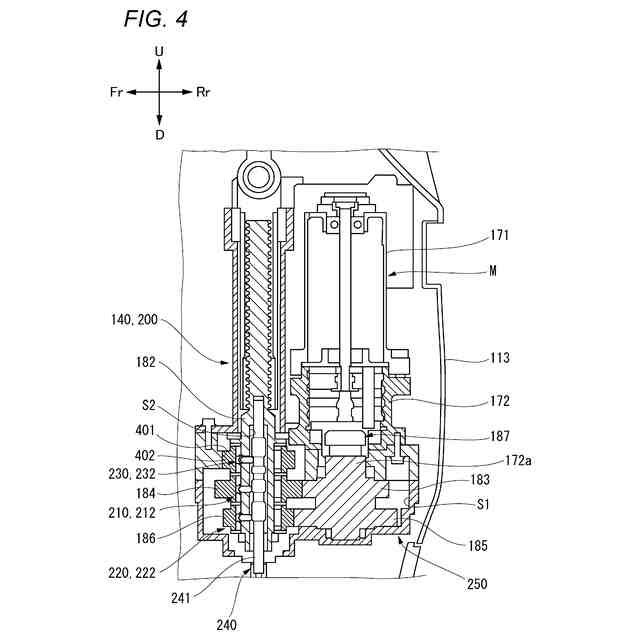
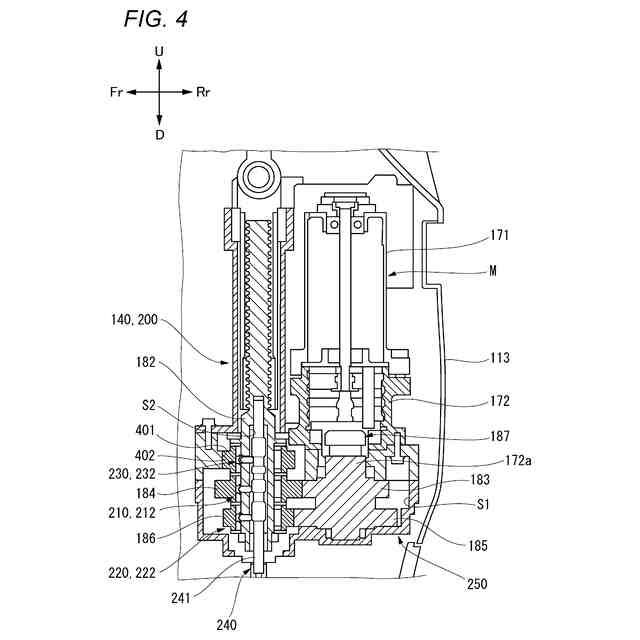
【解決手段】変速機Tは、モータMの動力を第1変速比で伝達する第1変速機構T1と、モータMの動力を第1変速比とは異なる第2変速比で伝達する第2変速機構T2と、ロック機構400と、を備える。ロック機構400は、互いに噛合う固定ギヤ401及びロックギヤ402を備える。ロックギヤ402は、固定ギヤ401との噛合いにより回転が規制された非回転体であり、中空穴に第2シャフト182を相対回転可能に収容する。断続機構230は、ロックギヤ402と第2シャフト182との間に設けられる断続部232を備える。
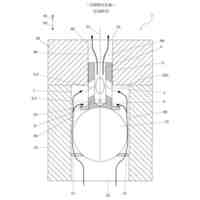
【選択図】図4
特許請求の範囲
【請求項1】
駆動部と被駆動部との動力伝達経路上に配置される動力伝達装置であって、
第1回転体と、
第2回転体と、
断続装置と、を備え、
該断続装置は、
前記第1回転体と前記第2回転体との間に配置される第1係合子と、
前記第1係合子を、前記第1回転体と前記第2回転体とが一体回転可能な係合状態と、前記第1回転体と前記第2回転体とが相対回転可能な非係合状態と、に操作する第1操作部と、を有し、
前記第1操作部は、
前記第1係合子を動かす第1作動子と、
該第1作動子を介して前記第1係合子を操作可能に、又は該第1作動子を介さず前記第1係合子を操作可能に設けられる第1操作子と、を有し、
前記第1回転体及び前記第2回転体は、
互いの回転軸線が一致するように、且つ、前記回転軸線と直交する直交方向視で、互いの少なくとも一部が重なり合うよう配置され、
前記第1操作子は、
前記回転軸線と直交する直交方向に沿って進退移動可能に設けられる第1進退子と、
前記回転軸線に沿って延在し、かつ該回転軸線に沿って進退移動可能に設けられる第1延在部と、を有し、
前記動力伝達装置は、前記回転軸線と回転軸線が一致するよう配置される第3回転体及び第4回転体をさらに備え、
前記断続装置は、
前記第3回転体と前記第4回転体との間に配置される第2係合子と、前記第2係合子を、前記第3回転体と前記第4回転体とが一体回転可能な係合状態と、前記第3回転体と前記第4回転体とが相対回転可能な非係合状態と、に操作する第2操作部と、をさらに有し、
前記動力伝達装置は、前記回転軸線と回転軸線が一致するよう配置される第5回転体と、該第5回転体を収容するよう設けられる非回転体と、をさらに備え、
前記断続装置は、
前記第5回転体と前記非回転体との間に配置される第3係合子と、
前記第3係合子を、前記第5回転体と前記非回転体とが相対回転不能な係合状態と、前記第5回転体と前記非回転体とが相対回転可能な非係合状態と、に操作する第3操作部と、をさらに有する、動力伝達装置。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の動力伝達装置であって、
前記第2操作部は、
前記第2係合子を動かす第2作動子と、
該第2作動子を介して前記第2係合子を操作可能に、又は該第2作動子を介さず前記第2係合子を操作可能に設けられる第2操作子と、を有し、
前記第3操作部は、
前記第3係合子を動かす第3作動子と、
該第3作動子を介して前記第3係合子を操作可能に、又は該第3作動子を介さず前記第3係合子を操作可能に設けられる第3操作子と、を有する、動力伝達装置。
【請求項3】
請求項2に記載の動力伝達装置であって、
前記第2操作子は、前記回転軸線と直交する直交方向に沿って進退移動可能に設けられる第2進退子と、
前記回転軸線に沿って延在し、かつ該回転軸線に沿って進退移動可能に設けられる第2延在部と、を有し、
前記第2進退子は、該第2進退子の前記直交方向における前記回転軸線側の端部である内端が、前記第2延在部と当接するよう設けられ、
前記第3操作子は、
前記回転軸線と直交する直交方向に沿って進退移動可能に設けられる第3進退子と、
前記回転軸線に沿って延在し、かつ該回転軸線に沿って進退移動可能に設けられる第3延在部と、を有し、
前記第3進退子は、該第3進退子の前記直交方向における前記回転軸線側の端部である内端が、前記第3延在部と当接するよう設けられる、動力伝達装置。
【請求項4】
請求項3に記載の動力伝達装置であって、
前記第2回転体、前記第4回転体、及び前記第5回転体は一体回転可能に設けられ、
前記第1延在部、前記第2延在部、及び第3延在部は一体に設けられるとともに、前記回転軸線方向において異なる位置に位置するよう配置される、動力伝達装置。
【請求項5】
請求項4に記載の動力伝達装置であって、
一体に設けられた前記第1延在部、前記第2延在部、及び第3延在部を延在部とすると、
前記延材部が、
前記回転軸線方向における第1の位置に位置するときに、前記第1進退子が前記直交方向における内側に位置し、前記第2進退子が前記直交方向における外側に位置し、且つ、前記第3進退子が前記直交方向における前記外側に位置し、
前記回転軸線方向における第2の位置に位置するときに、前記第1進退子が前記直交方向における前記外側に位置し、前記第2進退子が前記直交方向における前記内側に位置し、且つ、前記第3進退子が前記直交方向における前記外側に位置する、動力伝達装置。
【請求項6】
請求項4又は5に記載の動力伝達装置であって、
前記延在部が、
前記回転軸線方向における第3の位置に位置するときに、前記第1進退子が前記直交方向における外側に位置し、前記第2進退子が前記直交方向における前記外側に位置し、且つ、前記第3進退子が前記直交方向における前記外側に位置する、動力伝達装置。
【請求項7】
請求項6に記載の動力伝達装置であって、
前記第1進退子は、前記直交方向における前記外側に位置するときに前記第1係合子が前記非係合状態となり、内側に位置するときに前記第1係合子が前記係合状態となるよう設けられ、
前記第2進退子は、前記直交方向における前記外側に位置するときに前記第2係合子が前記非係合状態となり、前記内側に位置するときに前記第2係合子が前記係合状態となるよう設けられ、
前記第3進退子は、前記直交方向における前記外側に位置するときに前記第3係合子が前記非係合状態となり、前記内側に位置するときに前記第3係合子が前記係合状態となるよう設けられる、動力伝達装置。
【請求項8】
請求項4から7のいずれか1項に記載の動力伝達装置であって、
前記延在部が、
前記回転軸線方向における第4の位置に位置するときに、前記第1進退子が前記直交方向における外側に位置し、前記第2進退子が前記直交方向における前記外側に位置し、且つ、前記第3進退子が前記直交方向における内側に位置する、動力伝達装置。
【請求項9】
請求項4から8のいずれか1項に記載の動力伝達装置であって、
前記延在部が、
前記回転軸線方向における第5の位置に位置するときに、前記第1進退子が前記直交方向における内側に位置し、前記第2進退子が前記直交方向における前記内側に位置し、且つ、前記第3進退子が前記直交方向における前記内側に位置する、動力伝達装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、動力伝達装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
特許文献1に記載の動力伝達装置では、変速機が、駆動部の動力を第1変速比で被駆動部に伝達する第1変速機構と、駆動部の動力を第1変速比とは異なる第2変速比で被駆動部に伝達する第2変速機構と、断続機構によって第1変速機構及び第2変速機構における動力の遮断状態と接続状態とを切り替える断続機構と、を備えることが記載されている。これにより、駆動部の動力が第1変速機構を介して被駆動部に伝達される第1変速状態と、駆動部の動力が第2変速機構を介して被駆動部に伝達される第2変速状態と、変速機を介した駆動部の動力伝達が遮断されるニュートラル状態と、が選択可能となっている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/251500号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の動力伝達装置では、被駆動部をロック状態に維持することができなかった。
【0005】
本発明は、被駆動部をロック状態に維持することが可能な動力伝達装置を提供する。
【課題を解決するための手段】
【0006】
本発明は、
駆動部と被駆動部との動力伝達経路上に配置される動力伝達装置であって、
第1回転体と、
第2回転体と、
断続装置と、を備え、
該断続装置は、
前記第1回転体と前記第2回転体との間に配置される第1係合子と、
前記第1係合子を、前記第1回転体と前記第2回転体とが一体回転可能な係合状態と、前記第1回転体と前記第2回転体とが相対回転可能な非係合状態と、に操作する第1操作部と、を有し、
前記第1操作部は、
前記第1係合子を動かす第1作動子と、
該第1作動子を介して前記第1係合子を操作可能に、又は該第1作動子を介さず前記第1係合子を操作可能に設けられる第1操作子と、を有し、
前記第1回転体及び前記第2回転体は、
互いの回転軸線が一致するように、且つ、前記回転軸線と直交する直交方向視で、互いの少なくとも一部が重なり合うよう配置され、
前記第1操作子は、
前記回転軸線と直交する直交方向に沿って進退移動可能に設けられる第1進退子と、
前記回転軸線に沿って延在し、かつ該回転軸線に沿って進退移動可能に設けられる第1延在部と、を有し、
前記動力伝達装置は、前記回転軸線と回転軸線が一致するよう配置される第3回転体及び第4回転体をさらに備え、
前記断続装置は、
前記第3回転体と前記第4回転体との間に配置される第2係合子と、前記第2係合子を、前記第3回転体と前記第4回転体とが一体回転可能な係合状態と、前記第3回転体と前記第4回転体とが相対回転可能な非係合状態と、に操作する第2操作部と、をさらに有し、
前記動力伝達装置は、前記回転軸線と回転軸線が一致するよう配置される第5回転体と、該第5回転体を収容するよう設けられる非回転体と、をさらに備え、
前記断続装置は、
前記第5回転体と前記非回転体との間に配置される第3係合子と、
前記第3係合子を、前記第5回転体と前記非回転体とが相対回転不能な係合状態と、前記第5回転体と前記非回転体とが相対回転可能な非係合状態と、に操作する第3操作部と、をさらに有する。
【発明の効果】
【0007】
本発明によれば、被駆動部をロックすることができる。
【図面の簡単な説明】
【0008】
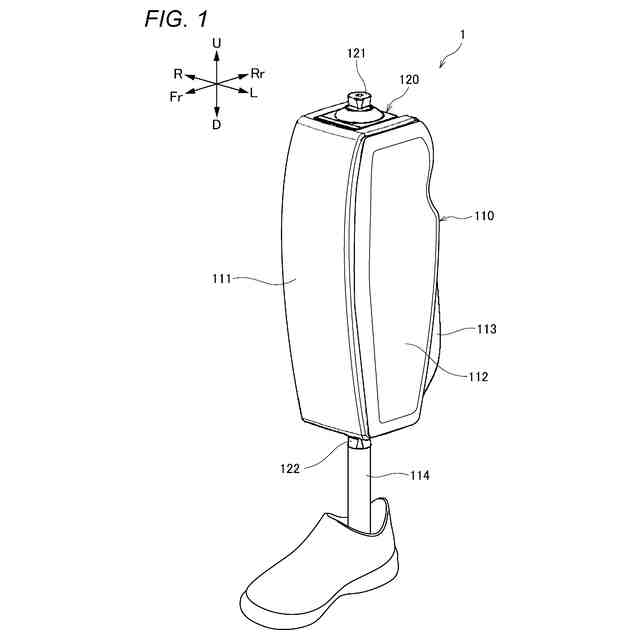
第1実施形態の電動義足1を斜め前方から見た斜視図である。
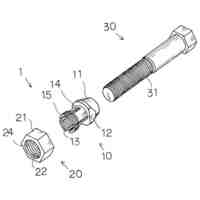
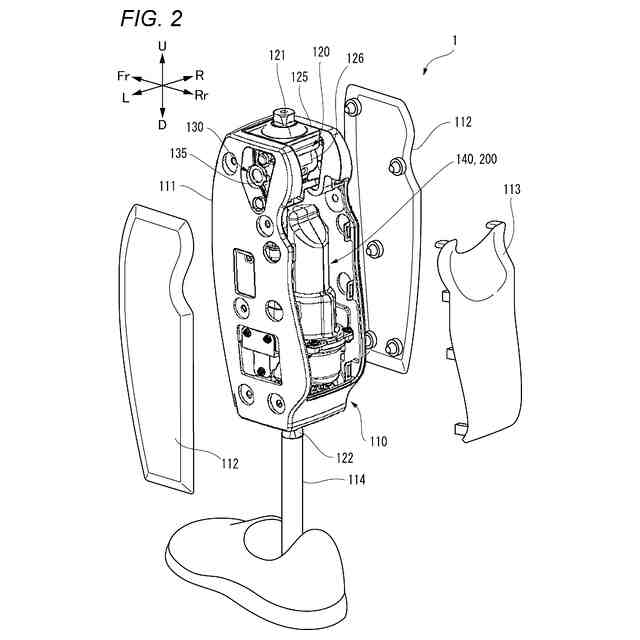
電動義足1の分解斜視図である。
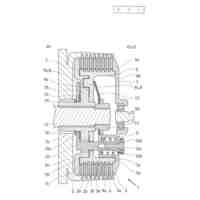
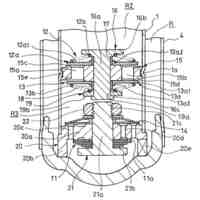
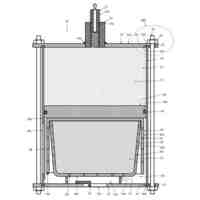
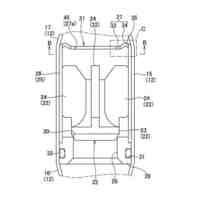
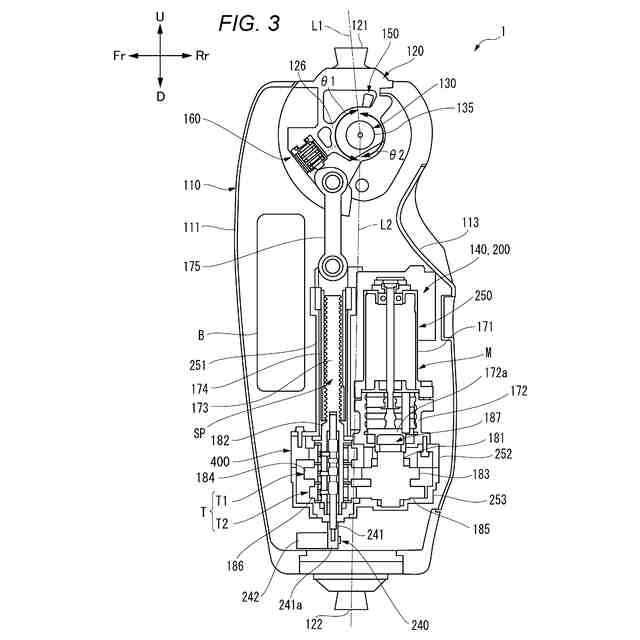
電動義足1の断面図である。
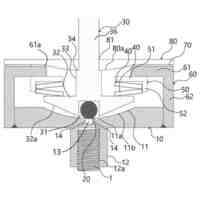
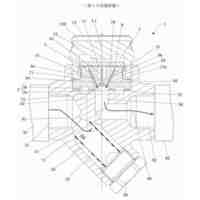
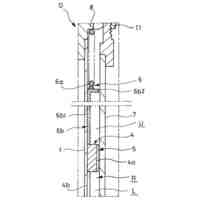
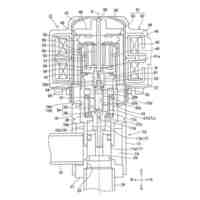
伸縮装置140の断面図である。
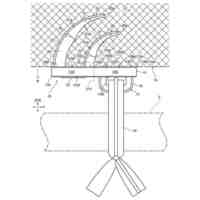
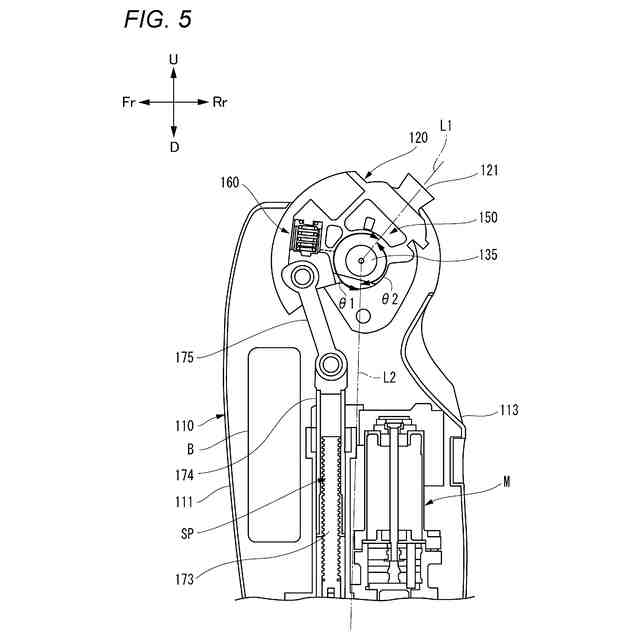
電動義足1の屈曲状態を示す要部断面図である。
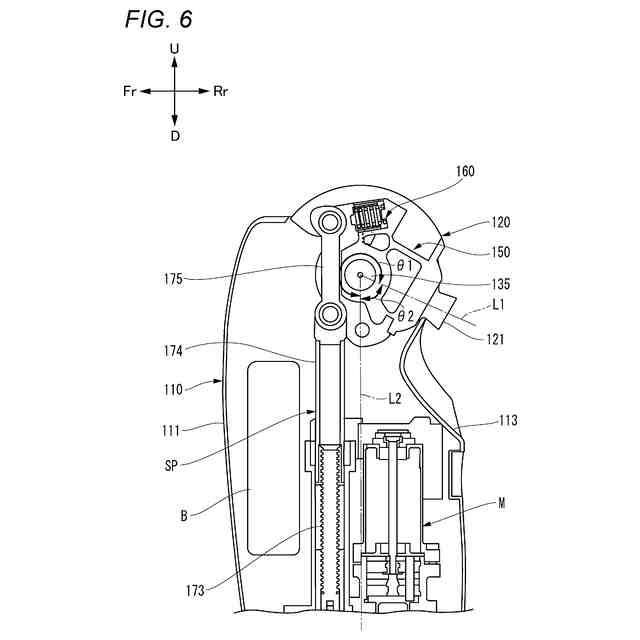
電動義足1の最大屈曲状態を示す要部断面図である。
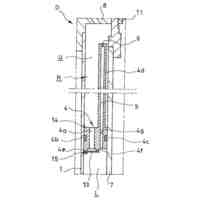
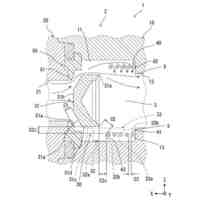
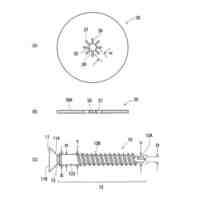
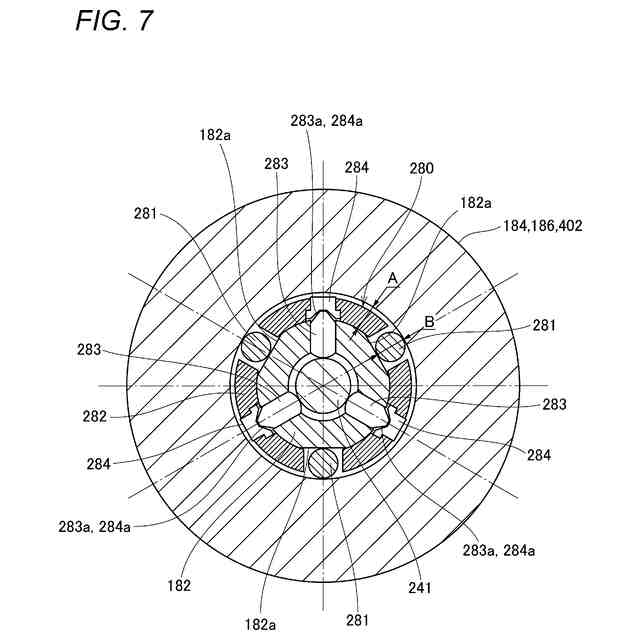
二方向クラッチの断面図である。
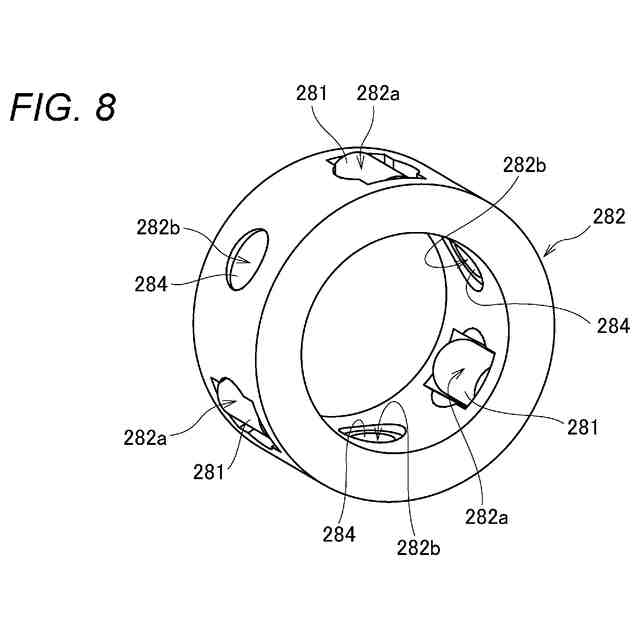
リテーナ282の斜視図である。
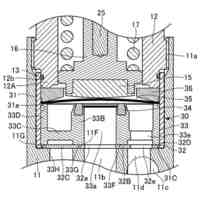
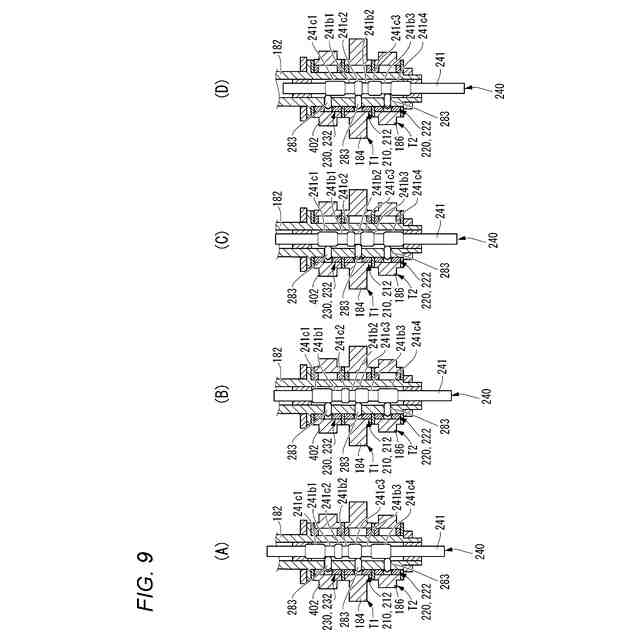
操作機構240の動作を示す図であり、(A)は操作ロッド241が上ポジションにあるときの操作機構240の断面図、(B)は操作ロッド241が中上ポジションにあるときの操作機構240の断面図、(C)は操作ロッド241が中下ポジションにあるときの操作機構240の断面図であり、(D)は操作ロッド241が下ポジションにあるときの操作機構240の断面図である。
(A)は、操作ロッド241が中上ポジションにあり、第3大径部241c3が断続部212のピン283を外径方向に押し出す状態を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
(A)は、操作ロッド241が中下ポジションにあり、第1小径部241b1が断続部212のピン283の内径方向への戻りを許容する状態を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
(A)は、第1従動ギヤ184に正転方向の回転が生じてローラ281が噛み合った正転オン状態を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
(A)は、第1従動ギヤ184に逆転方向の回転が生じてローラ281が噛み合った逆転オン状態を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
(A)は操作ロッド241が下ポジションにあり、第2大径部241c2が断続部212のピン283を外径方向に押し出す状態を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
昇段時の人間及び電動義足1の動作(昇段動作)を示す図である。
平地歩行時の人間及び電動義足1の動作(平地歩行動作)を示す図である。
第2実施形態の電動義足1の断面図である。
第3実施形態の電動義足1の側面図である。
第3実施形態の電動義足1に搭載される拡縮装置200の斜視図である。
図19の拡縮装置200の断面図である。
本発明の第4実施形態の動力伝達装置TM5を搭載した移動体M5を示す断面図であり、パーキング状態を説明する図である。
移動体M5のニュートラル状態を説明する図である。
移動体M5の前後進を説明する図である。
移動体M5の超信地旋回を説明する図である。
【発明を実施するための形態】
【0009】
先ず、本発明の一実施形態の動力伝達装置が内蔵された電動義足について図面を参照しながら説明する。なお、以下の説明では、電動義足の使用者を基準に前後方向、左右方向、上下方向を定義する。図面には、電動義足の前方をFr、後方をRr、左側をL、右側をR、上方をU、下方をDとして示す。
【0010】
[第1実施形態]
本実施形態の電動義足1は、図1~図4に示すように、ひざのない人の脚部に装着される義足であり、ひざの下側に位置する膝下側部材110と、大腿部に装着され、ひざの上側に位置する膝上側部材120と、膝下側部材110と膝上側部材120との成す角を変更可能に連接する膝関節機構130と、膝下側部材110と膝上側部材120との成す角を拡大及び縮小可能な拡縮装置200と、膝下側部材110と膝上側部材120との成す角の変更範囲を機械的に制限するメカストップ機構150と、メカストップ機構150による衝撃を緩衝する緩衝機構160と、拡縮装置200などに電力を供給するバッテリBと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
流路体
15日前
個人
クラッチ装置
19日前
個人
保持機
3か月前
個人
回転伝達機構
6か月前
個人
免震留具
2か月前
株式会社フジキン
配管
5か月前
個人
振り子式免震装置
3か月前
個人
固着具と成形品部材
12日前
藤井電工株式会社
フック
3か月前
個人
ロックナット
5か月前
個人
ネジの緩み防止装置
3か月前
株式会社アイシン
駆動装置
15日前
個人
緩み防止ナット
4か月前
個人
リンクプレート
6か月前
カヤバ株式会社
緩衝器
2か月前
株式会社テイエルブイ
自動弁
3か月前
カヤバ株式会社
緩衝器
26日前
株式会社テイエルブイ
排気弁
4か月前
カヤバ株式会社
緩衝器
26日前
マフレン株式会社
自動給脂器
6か月前
株式会社キッツ
逆止め弁
4か月前
株式会社不二工機
電動弁
2か月前
株式会社不二工機
電磁弁
3か月前
株式会社フジキン
バルブ
3か月前
株式会社ナベル
直動機構
2か月前
株式会社ナジコ
自在継手
5日前
横浜ゴム株式会社
管継手
5か月前
日動電工株式会社
保持具
3か月前
株式会社三五
ドライブシャフト
5か月前
北村精工株式会社
固定具
6か月前
株式会社不二工機
電動弁
5か月前
未来工業株式会社
固定体
2か月前
スズキ株式会社
防振装置
5か月前
株式会社不二工機
逆止弁
11日前
株式会社不二工機
電動弁
18日前
個人
配管用エルボカバー
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ