TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024162034
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2023077184
出願日
2023-05-09
発明の名称
表面実装機のヘッド間距離測定方法及び表面実装機
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
H05K
13/04 20060101AFI20241114BHJP(他に分類されない電気技術)
要約
【課題】ヘッド同士の衝突を回避しつつタクトタイムを低減する。
【解決手段】部品をピックアップして基板の表面に実装する移動可能な複数のヘッド11A,11Bを備えた表面実装機における当該ヘッド間の距離を測定する方法を提供する。この方法は、固定側ヘッド11Aを所定の基準位置に固定しつつ、移動側ヘッド11Bを固定側ヘッド11Aに接触する位置まで移動させる移動ステップと、移動側ヘッド11Bが固定側ヘッド11Aに接触したか否かを判定する判定ステップと、判定ステップで移動側ヘッド11Bと固定側ヘッド11Aとの接触が確認された場合に、当該接触時の各ヘッド11A,11Bの座標に基づいて、固定側ヘッド11Aと移動側ヘッド11Bとの距離であるヘッド間距離を算出する測定ステップとを含む。
【選択図】図7
特許請求の範囲
【請求項1】
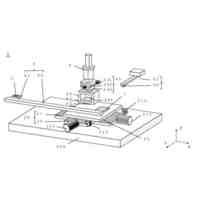
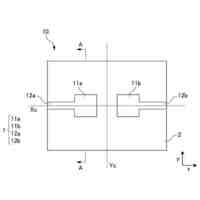
供給された部品をピックアップして基板の表面に実装する移動可能な複数のヘッドを備えた表面実装機における当該ヘッド間の距離を測定する方法であって、
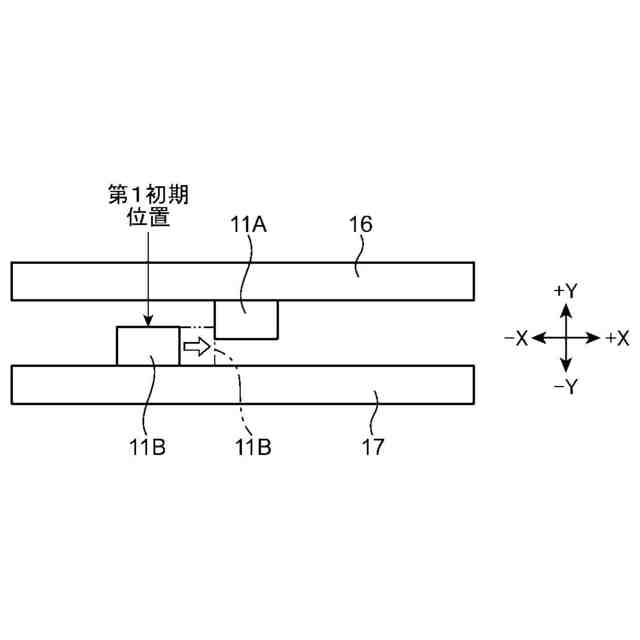
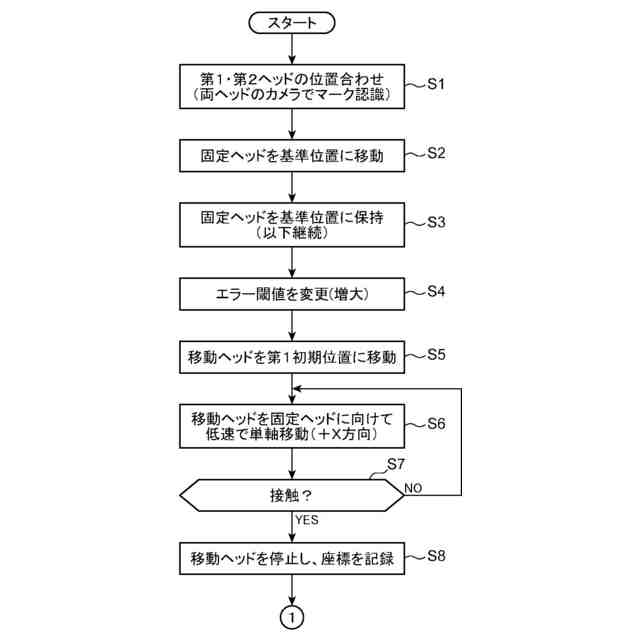
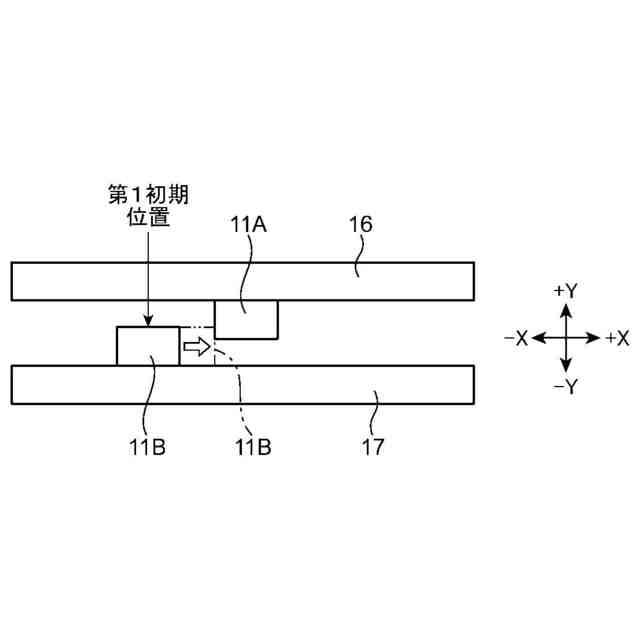
前記ヘッドの1つである固定側ヘッドを所定の基準位置に固定しつつ、前記ヘッドの他の1つである移動側ヘッドを前記固定側ヘッドに接触する位置まで移動させる移動ステップと、
前記移動側ヘッドが前記固定側ヘッドに接触したか否かを判定する判定ステップと、
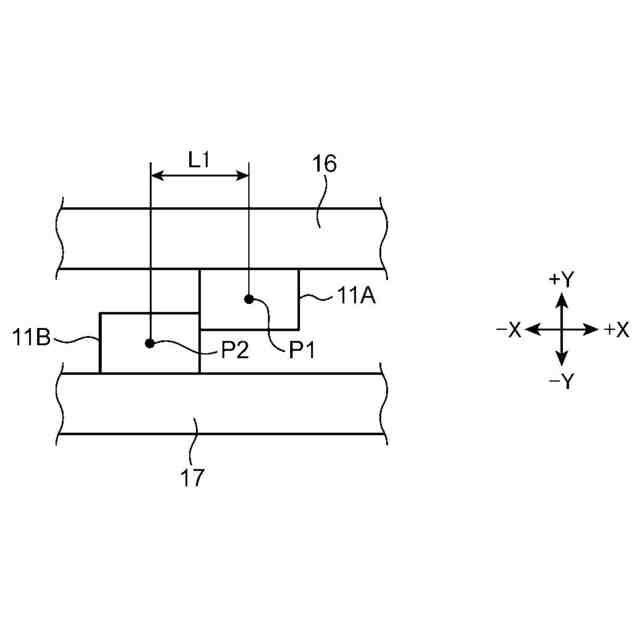
前記判定ステップで前記移動側ヘッドと前記固定側ヘッドとの接触が確認された場合に、当該接触時の各ヘッドの座標に基づいて、前記固定側ヘッドと前記移動側ヘッドとの距離であるヘッド間距離を算出する測定ステップとを含む、表面実装機のヘッド間距離測定方法。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の表面実装機のヘッド間距離測定方法において、
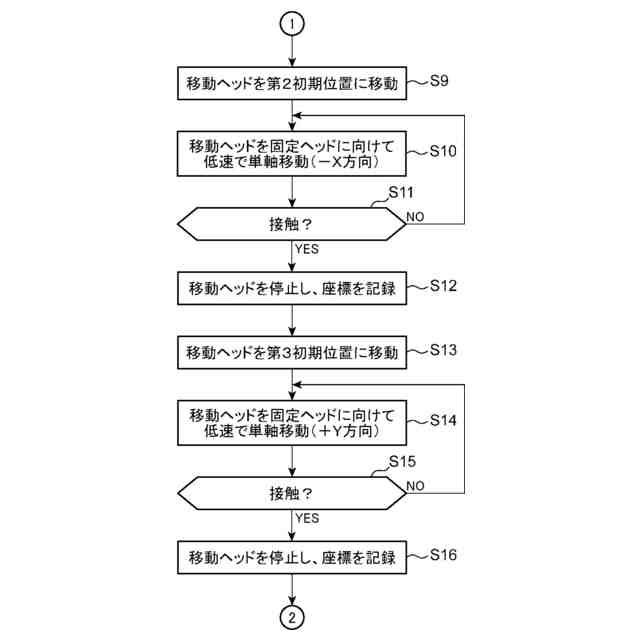
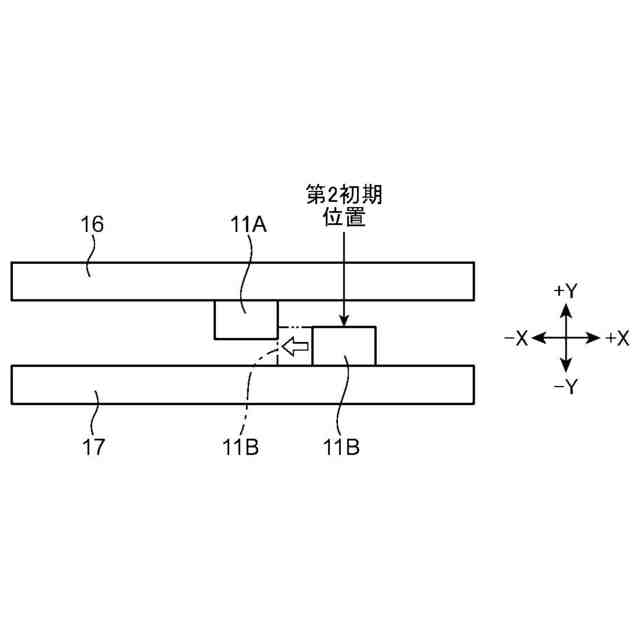
前記移動ステップでは、前記固定側ヘッドへの接近方向が異なる複数の接触パターンで前記移動側ヘッドが前記固定側ヘッドに接触するように前記移動側ヘッドを移動させ、
前記測定ステップでは、前記接触パターンごとに前記ヘッド間距離を算出する、表面実装機のヘッド間距離測定方法。
【請求項3】
請求項1又は2に記載の表面実装機のヘッド間距離測定方法において、
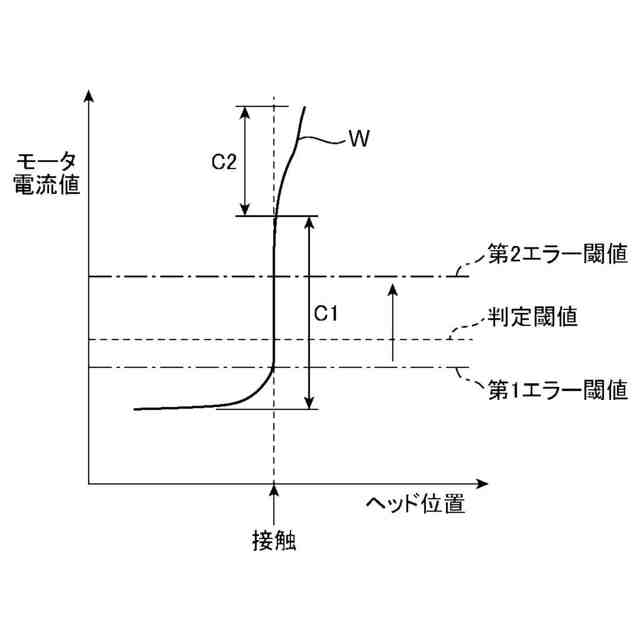
前記判定ステップでは、前記移動側ヘッドが前記固定側ヘッドに接触したときに値が上昇する所定のパラメータを検出し、検出した当該パラメータに基づいて前記接触の有無を判定する、表面実装機のヘッド間距離測定方法。
【請求項4】
請求項3に記載の表面実装機のヘッド間距離測定方法において、
接触によるエラーを検出するために前記パラメータについて設定されるエラー閾値を通常よりも大きい値に変更する閾値変更ステップをさらに含み、
前記判定ステップでは、変更後の前記エラー閾値よりも小さい値に設定された判定閾値を超えるまで前記パラメータが上昇した場合に、前記接触が起きたと判定する、表面実装機のヘッド間距離測定方法。
【請求項5】
請求項3に記載の表面実装機のヘッド間距離測定方法において、
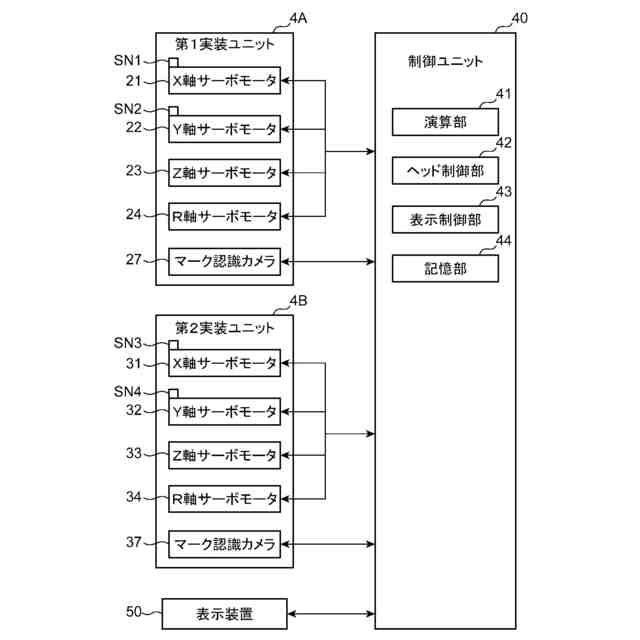
前記表面実装機は、前記固定側ヘッドの駆動源である第1モータと、前記移動側ヘッドの駆動源である第2モータとを備え、
前記パラメータは、前記第1モータ及び前記第2モータの少なくとも一方の電流値である、表面実装機のヘッド間距離測定方法。
【請求項6】
請求項1又は2に記載の表面実装機のヘッド間距離測定方法において、
前記表面実装機は、その基台に付された基準マークを前記ヘッド側から認識するカメラ、又は前記ヘッドに付された基準マークを前記基台側から認識するカメラを備え、
前記移動ステップでは、前記カメラが前記基準マークを認識する位置を前記基準位置として、当該基準位置に前記固定側ヘッドを配置するとともに、前記カメラによる前記基準マークの認識状態に基づいて前記固定側ヘッドが前記基準位置に固定されていることを確認しながら前記移動側ヘッドを前記固定側ヘッドに接触させる、表面実装機のヘッド間距離測定方法。
【請求項7】
請求項6に記載の表面実装機のヘッド間距離測定方法において、
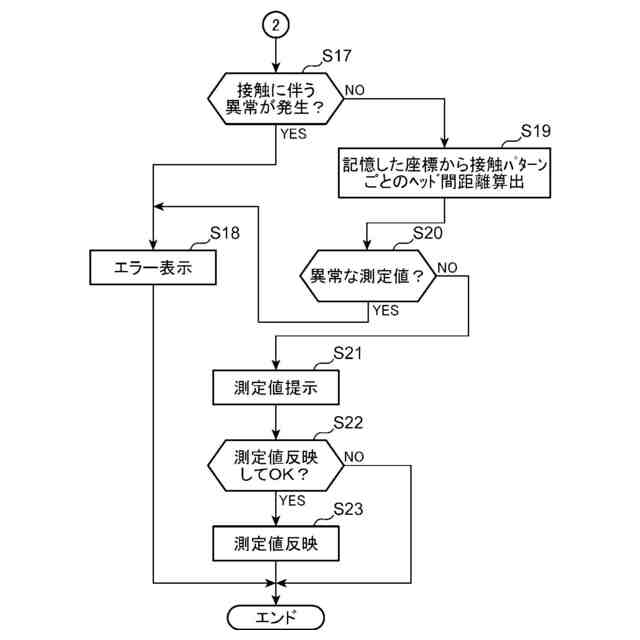
前記移動ステップの後、前記固定側ヘッドを所定位置に配置したときの当該固定側ヘッドの座標と、前記移動側ヘッドを前記所定位置に配置したときの当該移動側ヘッドの座標とに基づいて、前記接触による異常が生じていないことを確認する確認ステップをさらに含む、表面実装機のヘッド間距離測定方法。
【請求項8】
請求項1又は2に記載の表面実装機のヘッド間距離測定方法において、
前記測定ステップで求めた前記ヘッド間距離が想定範囲から外れた異常値である場合に、異常が起きたことをオペレータに報知する報知ステップと、
前記測定ステップで求めた前記ヘッド間距離が前記異常値でない場合に、前記ヘッド間距離の更新の要否をオペレータに問い合わせる問合せステップとをさらに含む、表面実装機のヘッド間距離測定方法。
【請求項9】
供給された部品をピックアップして基板の表面に実装する移動可能な複数のヘッドと、
前記各ヘッドを移動させる移動機構と、
前記ヘッドの1つである固定側ヘッドを所定の基準位置に固定しつつ、前記ヘッドの他の1つである移動側ヘッドが前記固定側ヘッドに接触する位置まで移動するように前記移動機構を制御する移動制御部と、
前記移動側ヘッドが前記固定側ヘッドに接触したか否かを判定する判定部と、
前記判定部が前記移動側ヘッドと前記固定側ヘッドとの接触を確認したときの各ヘッドの座標に基づいて、前記固定側ヘッドと前記移動側ヘッドとの距離であるヘッド間距離を算出する演算部とを備えた、表面実装機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、基板の表面に部品を実装する表面実装機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
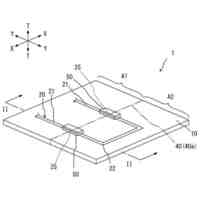
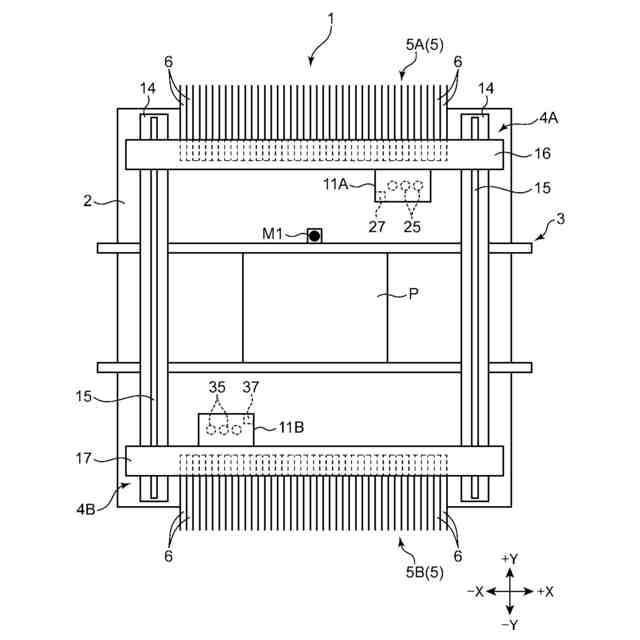
表面実装機は、部品を供給する部品供給装置と、当該部品供給装置から供給された部品をピックアップして基板上に実装する移動可能なヘッドとを備える。また、表面実装機の一種として、複数のヘッドを備えたマルチヘッド型の表面実装機が知られている。例えば、下記特許文献1には、2つのヘッド(装着ヘッド)を備えるとともに、両ヘッドの衝突を防止するための対策を施した表面実装機(電子部品装着装置)が開示されている。
【0003】
具体的に、下記特許文献1の表面実装機では、一方のヘッドに他方のヘッドが近づく場合に、近づく方の(他方の)ヘッドの動作をモーションコントローラから指令される位置情報に基づき制御するとともに、近づかれる方の(一方の)ヘッドの動作をエンコーダから取得される位置情報に基づき制御することが行われている。
【先行技術文献】
【特許文献】
【0004】
特開2011-14592号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の表面実装機によれば、一方のヘッドに他方のヘッドが近づく場合に、近づく方のヘッドにいち早く制動をかけることができ、ヘッド同士の衝突をより安全に防止できるとされている。
【0006】
しかしながら、上記のように早めの制動によってヘッド同士の衝突を回避した場合には、ヘッドの平均速度が低下するか、もしくはヘッドの移動経路が最短経路に対し長くなるおそれがある。このことは、1つの基板に対し必要数の部品を実装するのに要する時間であるタクトタイムの長期化につながる。
【0007】
本発明は、上記のような事情に鑑みてなされたものであり、ヘッド同士の衝突を回避しつつタクトタイムを低減することが可能な表面実装機のヘッド間距離測定方法及び表面実装機を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するためのものとして、本発明の一局面に係るヘッド間距離測定方法は、供給された部品をピックアップして基板の表面に実装する移動可能な複数のヘッドを備えた表面実装機における当該ヘッド間の距離を測定する方法であって、前記ヘッドの1つである固定側ヘッドを所定の基準位置に固定しつつ、前記ヘッドの他の1つである移動側ヘッドを前記固定側ヘッドに接触する位置まで移動させる移動ステップと、前記移動側ヘッドが前記固定側ヘッドに接触したか否かを判定する判定ステップと、前記判定ステップで前記移動側ヘッドと前記固定側ヘッドとの接触が確認された場合に、当該接触時の各ヘッドの座標に基づいて、前記固定側ヘッドと前記移動側ヘッドとの距離であるヘッド間距離を算出する測定ステップとを含むものである。
【0009】
本発明では、2つのヘッドが実際に接触したときの座標に基づいてヘッド間距離が算出されるので、各ヘッドの実際の寸法誤差又は組付け誤差を反映した正確なヘッド間距離を測定することができる。正確なヘッド間距離が分かれば、部品を実装する際の各ヘッドの移動ルートとして、両者の衝突を避け得るできるだけ短い移動ルートを設定することができる。これにより、各ヘッドの移動に要する時間を短縮することができ、部品実装のタクトタイムを低減することができる。
【0010】
例えば、2つのヘッドを用いて部品を実装する際に、各ヘッドを直線的に最短距離で移動させると両者が衝突(接触)してしまう場合がある。このような場合、衝突が起きないように移動ルートを変更する必要があるが、正確なヘッド間距離が分かっていないと、例えばヘッド間距離の設計値に基づいて移動ルートを変更しなければならず、変更後の移動ルートが長尺化する可能性がある。すなわち、ヘッド間距離の設計値しか分からない状況では、考えられる最大の寸法誤差や組付け誤差が存在してもヘッド同士が衝突しないように、ヘッド同士の距離が比較的大きく保たれる安全な移動ルートに変更する必要がある。しかしながら、このような移動ルートは、ヘッド同士が互いに大きく迂回するような距離の長いルートとなり易い。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ヤマハ発動機株式会社
電力変換装置
1日前
ヤマハ発動機株式会社
船舶推進システムおよび船舶
今日
日星電気株式会社
面状ヒータ
1か月前
日本精機株式会社
電子回路装置
1か月前
イビデン株式会社
配線基板
1か月前
株式会社下村漆器店
調理機
今日
株式会社下村漆器店
調理機
今日
イビデン株式会社
配線基板
1か月前
イビデン株式会社
配線基板
1か月前
富山県
EBG構造基板
今日
株式会社クラベ
基材及び面状ユニット
20日前
TDK株式会社
回路基板
1か月前
JOHNAN株式会社
回路基板
1か月前
東芝ライテック株式会社
照明装置
1か月前
太陽誘電株式会社
バルクフィーダ
20日前
イビデン株式会社
プリント配線板
今日
東レエンジニアリング株式会社
実装装置
1か月前
イビデン株式会社
配線基板
7日前
三笠電子工業株式会社
装飾具
17日前
原田工業株式会社
電子回路ユニット
1か月前
象印マホービン株式会社
調理器
28日前
新光電気工業株式会社
配線基板
1か月前
株式会社富士通ゼネラル
電子機器収納ラック
1か月前
NISSHA株式会社
回路埋込基板の製造方法
20日前
株式会社デンソー
電子装置
今日
NISSHA株式会社
回路埋込基板の製造方法
20日前
東芝ライテック株式会社
照明装置
1か月前
株式会社アイシン
回路基板
1か月前
東芝ライテック株式会社
照明装置
1か月前
TDK株式会社
アンテナモジュール
1か月前
ダイハツ工業株式会社
車両制御装置
28日前
ヤマハ発動機株式会社
部品供給装置
1か月前
古河電気工業株式会社
多層回路基板
1か月前
富士電子工業株式会社
高周波焼入システム
29日前
リンナイ株式会社
加熱調理装置
28日前
京セラ株式会社
電子機器
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ