TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024154068
公報種別
公開特許公報(A)
公開日
2024-10-30
出願番号
2023067680
出願日
2023-04-18
発明の名称
運搬車
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
B62D
11/04 20060101AFI20241023BHJP(鉄道以外の路面車両)
要約
【課題】運搬車において、車輪や地面に対する負荷を軽減しつつ、所望の旋回半径で進行方向を変えることが可能な技術を提供する。
【解決手段】本明細書が開示する運搬車は、車台と、車台に支持されており、地面に接地する右前輪、左前輪、右後輪および左後輪と、右前輪、左前輪、右後輪および左後輪のうちの少なくとも1つを、操舵輪として操舵する操舵機構と、右前輪、左前輪、右後輪および左後輪を駆動する原動機と、操舵機構および原動機の動作を制御する制御ユニットを備えている。第1の旋回運転モードにおいて、制御ユニットは、旋回半径の指令値が大きい場合に、操舵輪を指令値に応じた操舵角とする操舵旋回運転を実行し、旋回半径の指令値が小さい場合に、操舵輪を直進時の操舵角とし、右前輪および右後輪に対して、左前輪および左後輪を逆方向に回転させる超信地旋回運転を実行するように構成されている。
【選択図】図28
特許請求の範囲
【請求項1】
運搬車であって、
車台と、
前記車台に支持されており、地面に接地する右前輪、左前輪、右後輪および左後輪と、
前記右前輪、前記左前輪、前記右後輪および前記左後輪のうちの少なくとも1つを、操舵輪として操舵する操舵機構と、
前記右前輪、前記左前輪、前記右後輪および前記左後輪を駆動する原動機と、
前記操舵機構および前記原動機の動作を制御する制御ユニットを備えており、
前記制御ユニットは、第1の旋回運転モードで動作可能であり、
前記第1の旋回運転モードにおいて、前記制御ユニットは、旋回半径の指令値が大きい場合に、前記操舵輪を前記指令値に応じた操舵角とする操舵旋回運転を実行し、前記旋回半径の前記指令値が小さい場合に、前記操舵輪を直進時の操舵角とし、前記右前輪および前記右後輪に対して、前記左前輪および前記左後輪を逆方向に回転させる超信地旋回運転を実行するように構成されている、運搬車。
続きを表示(約 380 文字)
【請求項2】
前記車台に回動軸周りに回動可能に支持されており、ユーザによって操作されるハンドルと、
前記ハンドルの前記回動軸周りの回動角度を検出する回動角度センサをさらに備えており、
前記制御ユニットは、前記回動角度センサの出力信号に基づいて、前記旋回半径の前記指令値を特定する、請求項1の運搬車。
【請求項3】
前記制御ユニットは、前記第1の旋回運転モードを含む複数の旋回運転モードの中からユーザが選択した旋回運転モードで動作するように構成されており、
前記複数の旋回運転モードは、第2の旋回運転モードをさらに含んでおり、
前記第2の旋回運転モードにおいて、前記制御ユニットは、前記旋回半径の前記指令値に関わらず、常に前記操舵旋回運転を実行するように構成されている、請求項1または2の運搬車。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、運搬車に関する。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
特許文献1には、車台と、前記車台に支持されており、地面に接地する右前輪、左前輪、右後輪および左後輪と、前記右前輪、前記左前輪、前記右後輪および前記左後輪のうちの少なくとも1つを、操舵輪として操舵する操舵機構と、前記右前輪、前記左前輪、前記右後輪および前記左後輪を駆動する原動機と、前記操舵機構および前記原動機の動作を制御する制御ユニットを備えている。前記制御ユニットは、前記操舵輪を前記指令値に応じた操舵角とする操舵旋回運転と、前記操舵輪を直進時の操舵角とし、前記右前輪および前記右後輪に対して、前記左前輪および前記左後輪を逆方向に回転させる超信地旋回運転を実行可能である。
【先行技術文献】
【特許文献】
【0003】
特開平4-135992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、超信地旋回運転によって進行方向を変える場合、旋回半径を小さくすることができるものの、車輪と地面の間の摩擦が大きく、車輪や地面に対する負荷が大きくなる。これに対して、操舵旋回運転によって進行方向を変える場合、車輪や地面に対する負荷を小さくすることができるものの、旋回半径が大きくなる。本明細書では、運搬車において、車輪や地面に対する負荷を軽減しつつ、所望の旋回半径で進行方向を変えることが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する運搬車は、車台と、前記車台に支持されており、地面に接地する右前輪、左前輪、右後輪および左後輪と、前記右前輪、前記左前輪、前記右後輪および前記左後輪のうちの少なくとも1つを、操舵輪として操舵する操舵機構と、前記右前輪、前記左前輪、前記右後輪および前記左後輪を駆動する原動機と、前記操舵機構および前記原動機の動作を制御する制御ユニットを備えていてもよい。前記制御ユニットは、第1の旋回運転モードで動作可能であってもよい。前記第1の旋回運転モードにおいて、前記制御ユニットは、旋回半径の指令値が大きい場合に、前記操舵輪を前記指令値に応じた操舵角とする操舵旋回運転を実行し、前記旋回半径の前記指令値が小さい場合に、前記操舵輪を直進時の操舵角とし、前記右前輪および前記右後輪に対して、前記左前輪および前記左後輪を逆方向に回転させる超信地旋回運転を実行するように構成されていてもよい。
【0006】
上記の構成によれば、第1の旋回運転モードにおいて、旋回半径の指令値が大きい場合には、制御ユニットが操舵旋回運転を実行するので、車輪や地面に対する負荷を軽減することができる。また、第1の旋回運転モードにおいて、旋回半径の指令値が小さい場合には、制御ユニットが超信地旋回運転を実行するので、小さい旋回半径で進行方向を変えることができる。上記の構成によれば、運搬車において、車輪や地面に対する負荷を軽減しつつ、所望の旋回半径で進行方向を変えることができる。
【図面の簡単な説明】
【0007】
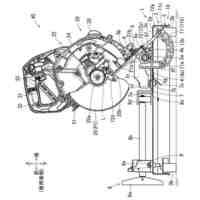
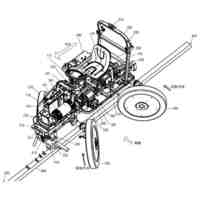
実施例に係る運搬車2を前方右方上方から見た斜視図である。
実施例に係る運搬車2を後方右方上方から見た斜視図である。
実施例に係る車台ユニット4と荷台ユニット6を前後方向および上下方向に沿った断面で見た断面図である。
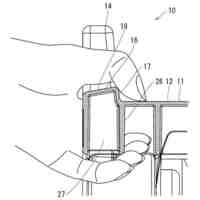
実施例に係るハンドルユニット8を後方右方上方から見た斜視図である。
実施例に係るハンドルユニット8を前方右方上方から見た斜視図である。
実施例に係るハンドルユニット8の支持パイプ52と、クランプスリーブ54と、上側アーム板58と、ハンドルスリーブ62を、後方右方上方から見た斜視図である。
実施例に係るハンドルユニット8の下部を前後方向および上下方向に沿った断面で見た断面図である。
実施例に係るハンドルユニット8の支持パイプ52と、下側アーム板60と、ハンドルスリーブ62と、ハンドルシャフト64と、スライドスリーブ70と、コイルバネ72と、センサベース78を、前方右方下方から見た斜視図である。
実施例に係るハンドルユニット8の下部を左右方向および上下方向に沿った断面で見た断面図である。
実施例に係るハンドルユニット8の支持パイプ52と、下側アーム板60と、ハンドルスリーブ62と、ハンドルシャフト64と、コイルバネ72と、センサベース78を、前方右方下方から見た斜視図である。
実施例に係るハンドルユニット8において、ユーザから右方向への回動操作が行われた状態での、ハンドルユニット8の下部を左右方向および上下方向に沿った断面で見た断面図である。
実施例に係るハンドルユニット8のセンサ基板115を後方右方上方から見た斜視図である。
実施例に係るハンドルユニット8のセンサベース78を前方右方下方から見た斜視図である。
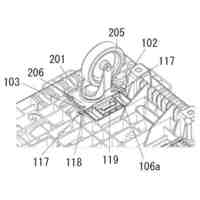
実施例に係る操舵ユニット10と前輪ユニット12を前方左方上方から見た斜視図である。
実施例に係る操舵ユニット10を前方右方上方から見た斜視図である。
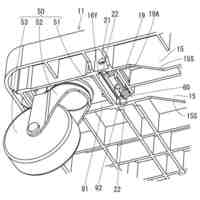
実施例に係る操舵ユニット10を前後方向および上下方向に沿った断面で見た断面図である。
実施例に係る操舵ユニット10を前後方向および左右方向に沿った断面で見た断面図である。
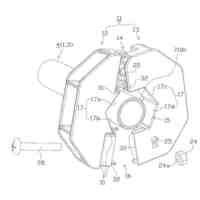
実施例に係る操舵ユニット10のスピンドル142、カムホイール144、スパーギヤ146、ストッパプレート148およびコイルバネ150を、前方左方上方から見た分解斜視図である。
実施例に係る操舵ユニット10を前後方向および上下方向に沿った別の断面で見た断面図である。
実施例に係る右前輪ユニット12aを前方左方上方から見た斜視図である。
実施例に係る右前輪ユニット12aを左右方向および上下方向に沿った断面で見た断面図である。
実施例に係る右前輪ユニット12aにおいて、右側キングピン172から取り外された状態の右側操舵プレート182を、前方左方上方から見た斜視図である。
実施例に係る右後輪ユニット14aを後方左方上方から見た斜視図である。
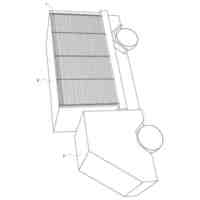
実施例に係るバンパユニット16を前方右方上方から見た斜視図である。
実施例に係るバンパユニット16を後方左方下方から見た斜視図である。
実施例に係るバンパユニット16の左部を前後方向および左右方向に沿った断面で見た断面図である。
実施例に係るバンパユニット16の軸受ボックス244、直動パイプ254、スイッチ支持部材270、当接プレート274および衝突検知スイッチ278を後方左方上方から見た斜視図である。
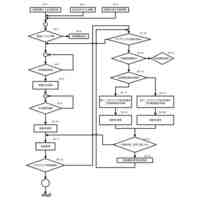
実施例に係る制御ユニット35が実行する旋回運転処理のフローチャートである。
実施例に係る制御ユニット35が操舵旋回運転を実行する際に行う処理のフローチャートである。
実施例に係る運搬車2が操舵旋回運転をする時の、ハンドルユニット8と、操舵ユニット10と、前輪ユニット12と、後輪ユニット14の様子を、上方から見た平面図である。
実施例に係る運搬車2が超信地旋回運転をする時の、ハンドルユニット8と、操舵ユニット10と、前輪ユニット12と、後輪ユニット14の様子を、上方から見た平面図である。
【発明を実施するための形態】
【0008】
以下では、本発明の代表的かつ非限定的な具体例について、図面を参照して詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、以下に開示される追加的な特徴ならびに発明は、さらに改善された運搬車、その製造方法及び使用方法を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、上記及び下記の代表的な具体例の様々な特徴、ならびに、独立及び従属クレームに記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又はクレームに記載された特徴の構成とは別に、出願当初の開示ならびにクレームされた特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびにクレームされた特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動工具
10日前
株式会社マキタ
打撃工具
16日前
株式会社マキタ
電動工具
16日前
株式会社マキタ
電動作業機
16日前
株式会社マキタ
ハンマ用作業カート
17日前
株式会社マキタ
金工用定置式切断機
17日前
株式会社マキタ
携帯用切断機用スタンドおよび定置式切断機
16日前
個人
自転車の傘
10か月前
個人
重量物移動台車
7か月前
個人
自転車用傘捕捉具
25日前
井関農機株式会社
作業機
8か月前
個人
車両用横転防止装置
8か月前
個人
自転車用荷台
4か月前
井関農機株式会社
作業機
10か月前
個人
体重掛けリフト台車
3日前
個人
自転車用荷物台
9日前
井関農機株式会社
作業車両
5か月前
個人
アタッチメント
26日前
個人
クリアレインシェード
7か月前
日本精機株式会社
表示装置
9か月前
三甲株式会社
保護具
8か月前
株式会社クラベ
面状ユニット
6か月前
株式会社CPM
駐輪機
1か月前
個人
スライドレインプルーフ
6か月前
株式会社北誠商事
被覆構造体
9か月前
個人
ステアリングの操向部材
3か月前
株式会社ホシプラ
台車
7か月前
帝人株式会社
車両構造体
6か月前
三甲株式会社
台車
10か月前
三甲株式会社
台車
3か月前
三甲株式会社
台車
3か月前
祖峰企画株式会社
平台車
4か月前
三甲株式会社
台車
8か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ